一種LiDAR點(diǎn)云生成格網(wǎng)DEM的快速算法
2012-12-11 06:06:38李曉紅
測繪通報(bào) 2012年12期
關(guān)鍵詞:規(guī)則
李曉紅
(山西省基礎(chǔ)地理信息院,山西太原030001)
一、引 言
機(jī)載激光雷達(dá)(light detection and ranging,LiDAR)是一種快速獲取高精度地面和地物三維信息的新技術(shù)。隨著機(jī)載激光雷達(dá)技術(shù)的高速發(fā)展,獲取的點(diǎn)云數(shù)據(jù)量越來越大。如何處理海量的點(diǎn)云數(shù)據(jù),并從中提取有用的地形信息和地物信息,是當(dāng)前急需解決的問題。
DEM有多種表現(xiàn)形式,其中TIN和規(guī)則格網(wǎng)DEM是兩種重要的表達(dá)方式。從表達(dá)地形信息的角度而言,TIN模型的優(yōu)點(diǎn)是它能以不同層次的分辨率來描述地形表面。規(guī)則格網(wǎng)則具有存儲量小,數(shù)據(jù)結(jié)構(gòu)簡單,便于存儲、管理及分析計(jì)算等優(yōu)點(diǎn),因此該數(shù)字地形模型得到了廣泛的應(yīng)用。規(guī)則格網(wǎng)文件結(jié)構(gòu)相對簡單,存儲了格網(wǎng)點(diǎn)坐標(biāo)的最大值、最小值、格網(wǎng)間距、格網(wǎng)點(diǎn)數(shù)及高程值。規(guī)則格網(wǎng)可以直接從離散采樣點(diǎn)據(jù)插值得到,也可以通過不規(guī)則三角網(wǎng)(TIN)數(shù)據(jù)內(nèi)插得到。本文提出一種將LiDAR點(diǎn)云數(shù)據(jù)構(gòu)成TIN后快速內(nèi)插生成規(guī)則格網(wǎng)DEM的算法。
二、DEM的生成方法
DEM可以通過攝影測量的方式生成[1],但是通過先獲取離散的高程點(diǎn),再對均勻分布的格網(wǎng)點(diǎn)高程內(nèi)插生成DEM的方式更為普遍。
插值可以分為整體插值、分塊插值和逐點(diǎn)插值。整體內(nèi)插是將整個(gè)地區(qū)采用高次多項(xiàng)式來表示。由于實(shí)際地形是復(fù)雜變化多樣的,單用一個(gè)多項(xiàng)式難以表述實(shí)際地形,因此DEM內(nèi)插中一般不采用整體函數(shù)內(nèi)插。局部分塊內(nèi)插是將地形按照一定的規(guī)則進(jìn)行分塊,分塊的大小可以根據(jù)地形的復(fù)雜程度來確定。對每一塊區(qū)域采用單獨(dú)的函數(shù)模型進(jìn)行擬合內(nèi)插,不同的分塊單元可用不同的內(nèi)插函數(shù),常用的內(nèi)插數(shù)函數(shù)有線性內(nèi)插、雙線性內(nèi)插、多項(xiàng)式內(nèi)插、樣條函數(shù)、多層曲面疊加法等。逐點(diǎn)內(nèi)插的本質(zhì)也屬于局部內(nèi)插,但它與局部分塊內(nèi)插也有所不同,它是以內(nèi)插點(diǎn)為中心,確定一個(gè)指定大小的范圍,并通過這個(gè)范圍內(nèi)的點(diǎn)來選定合適的數(shù)學(xué)模型去擬合計(jì)算內(nèi)插點(diǎn)的高程。因此,逐點(diǎn)內(nèi)插的每個(gè)內(nèi)插點(diǎn)都隨著點(diǎn)的位置而變化,每個(gè)內(nèi)插的數(shù)學(xué)模型也不一樣,通常逐點(diǎn)內(nèi)插比局部分塊內(nèi)插具有更高的精度。
綜合考慮機(jī)載LiDAR點(diǎn)云濾波后數(shù)據(jù)特點(diǎn)、生成效率和精度,本文采用逐點(diǎn)內(nèi)插方法生成DEM。差值算法采用距離倒數(shù)加權(quán)插值法,它的基本原理是:對于每一個(gè)插值點(diǎn),可以設(shè)置一個(gè)距該點(diǎn)最近的指定半徑的范圍,落在該范圍內(nèi)的點(diǎn)都被定權(quán)參與該點(diǎn)插值的計(jì)算,具體的定權(quán)方式是與距離成反比,距離插值點(diǎn)越遠(yuǎn)的點(diǎn)賦予的權(quán)值越小,反之距離越近的點(diǎn)賦予的權(quán)值越大,如圖1所示。利用TIN中Delaunay可以快速確定一個(gè)點(diǎn)一定鄰域范圍內(nèi)的點(diǎn),以提高生成DEM效率。
三、算法流程
LiDAR點(diǎn)云生成DEM算法主要分為3個(gè)步驟:
1.將原始點(diǎn)云文件轉(zhuǎn)換為點(diǎn)云流文件
原始點(diǎn)云文件不能滿足流算法的要求,需要將原始點(diǎn)云文件轉(zhuǎn)換為點(diǎn)云流文件[2]。可根據(jù)點(diǎn)云數(shù)據(jù)內(nèi)在的空間拓?fù)湫畔ⅲ瑢Ⅻc(diǎn)云數(shù)據(jù)平均分塊、排序插入標(biāo)識后重新寫入點(diǎn)云流文件,以便流處理算法能夠應(yīng)用。
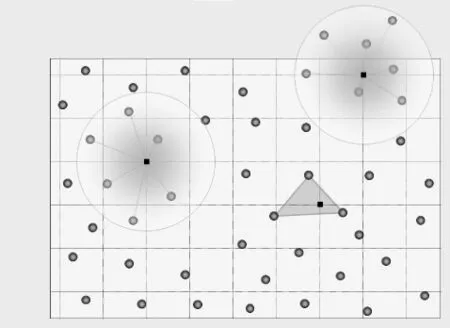
圖1 逐點(diǎn)內(nèi)插法生成DEM
點(diǎn)云流文件的建立主要有3個(gè)步驟:
1)遍歷原始點(diǎn)云文件,計(jì)算外包矩形,將外包矩形劃分為2k×2k個(gè)分塊矩形,構(gòu)建四叉樹。
2)遍歷原始點(diǎn)云文件,計(jì)算每個(gè)分塊中包含點(diǎn)云的數(shù)目。
3)再次遍歷原始點(diǎn)云文件,對點(diǎn)云重新排序,并在每個(gè)區(qū)塊的最后一點(diǎn)插入結(jié)束標(biāo)識。
2.構(gòu)建不規(guī)則三角網(wǎng)
采用改進(jìn)后的逐點(diǎn)插入法[2]對點(diǎn)云流文件進(jìn)行Delaunay三角剖分。從點(diǎn)云流文件中讀取一個(gè)點(diǎn)時(shí),采用逐點(diǎn)插入法進(jìn)行Delaunay三角剖分,并更新當(dāng)前的三角網(wǎng)鏈表(用于存儲當(dāng)前已經(jīng)生成的三角網(wǎng))。當(dāng)從點(diǎn)云文件中讀取到結(jié)束標(biāo)識時(shí),表明當(dāng)前分塊的點(diǎn)云已經(jīng)遍歷完畢,將四叉樹(將所有分塊作為葉節(jié)點(diǎn)構(gòu)建)中的該分塊標(biāo)記為遍歷完畢。判斷當(dāng)前三角網(wǎng)鏈表中的三角形是否處于固定狀態(tài)(當(dāng)遍歷一個(gè)分塊后,如果三角形的外包圓沒有與未被遍歷的分塊相交時(shí),認(rèn)為該三角形處于固定狀態(tài)),如果處于固定狀態(tài),則輸出到三角網(wǎng)文件,釋放內(nèi)存;如果處于活動狀態(tài)(如果三角形的外包圓與未被遍歷的分塊相交,則認(rèn)為三角形處于活動狀態(tài)),則繼續(xù)保留在內(nèi)存中,等待下一分塊遍歷完畢后繼續(xù)判斷,直到所有分塊讀取完畢,完成三角剖分。
3.插值生成規(guī)則格網(wǎng)DEM
與傳統(tǒng)的DEM插值方法不同,本文所采用的插值方法不是依次尋找規(guī)則格網(wǎng)點(diǎn)的領(lǐng)域點(diǎn)進(jìn)行內(nèi)插,而是通過遍歷三角網(wǎng)文件中的三角形,判斷三角形是否包含規(guī)則格網(wǎng)點(diǎn)。如果包含規(guī)則格網(wǎng)點(diǎn),則利用該三角形的3個(gè)頂點(diǎn)采用距離倒數(shù)加權(quán)插值法計(jì)算格網(wǎng)點(diǎn)高程,并將該格網(wǎng)點(diǎn)的行、列號及高程寫入臨時(shí)文件,釋放內(nèi)存。當(dāng)三角網(wǎng)文件遍歷完畢后,對生成的所有格網(wǎng)點(diǎn)臨時(shí)文件重新組織排序,寫入到統(tǒng)一的DEM格式文件中。這樣做的優(yōu)勢是內(nèi)存中既不保留三角網(wǎng)數(shù)據(jù),也不保留生成的格網(wǎng)點(diǎn)數(shù)據(jù),大大降低了程序內(nèi)存的使用量。算法流程如圖2所示。
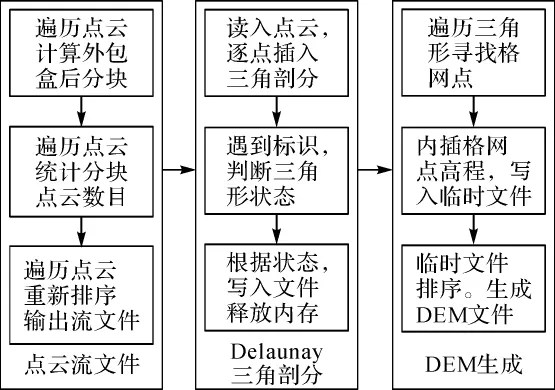
圖2 算法流程圖
四、試驗(yàn)結(jié)果與分析
本文采用了大小為100 MB、包含300萬個(gè)點(diǎn)的LiDAR數(shù)據(jù)進(jìn)行試驗(yàn),原始點(diǎn)云數(shù)據(jù)如圖3所示。
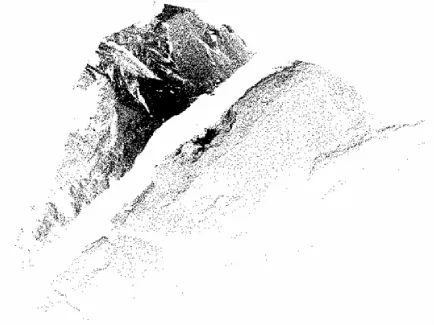
圖3 原始點(diǎn)云數(shù)據(jù)
首先將原始點(diǎn)云文件轉(zhuǎn)換為點(diǎn)云流文件。從原始點(diǎn)云文件轉(zhuǎn)換為點(diǎn)云流文件共耗時(shí)34 s,內(nèi)存最大使用量2.5MB。
對點(diǎn)云流文件進(jìn)行Delaunay三角剖分生成TIN,耗時(shí)9 s,內(nèi)存最大使用量2.6MB。生成的TIN如圖4所示。由于基于流的算法讀入數(shù)據(jù)進(jìn)行處理后馬上釋放內(nèi)存,只保留很少一部分未固定的數(shù)據(jù)在內(nèi)存中,所以內(nèi)存的使用量非常小。
DEM生成參數(shù)進(jìn)行設(shè)置如下:
1)采樣間隔設(shè)置:設(shè)置采樣間隔為5.0m。
2)TIN邊長閾值:設(shè)置為50m(邊長過長的三角形內(nèi)插獲得的高程值誤差很大)。
3)BIL文件設(shè)置:高程所放比例為1.0。
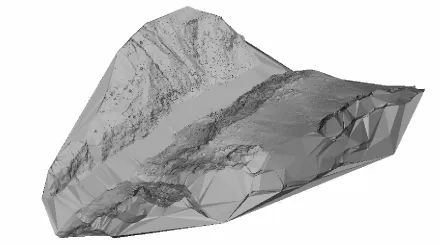
圖4 三角剖分后三角網(wǎng)數(shù)據(jù)
由TIN文件內(nèi)插生成DEM共耗時(shí)3 s,內(nèi)存最大使用量2.3 MB。DEM的內(nèi)插同樣采用基于流的算法,判斷完輸入三角形后立即釋放內(nèi)存,顯著提高了算法效率,并減少了內(nèi)存使用量。生成的規(guī)則格網(wǎng)DEM如圖5所示。
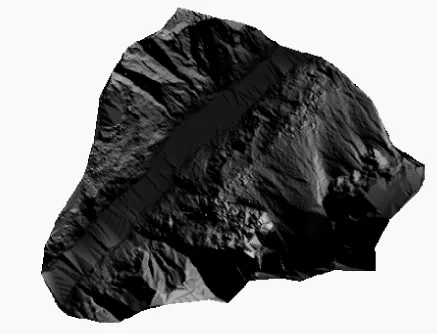
圖5 DEM生成渲染圖
試驗(yàn)結(jié)果表明,采用本文算法生成規(guī)則格網(wǎng)DEM的效率非常高,內(nèi)存使用量遠(yuǎn)遠(yuǎn)低于點(diǎn)云文件本身的大小,驗(yàn)證了流算法用于海量點(diǎn)云數(shù)據(jù)處理的有效性。同時(shí),本文算法生成的DEM準(zhǔn)確性非常高,并且能在多種復(fù)雜的地形中保持優(yōu)良的性能。
五、結(jié)束語
本文提出了一種LiDAR點(diǎn)云快速生成DEM的算法,首先將海量點(diǎn)云數(shù)據(jù)分塊,對每個(gè)分塊分別采用改進(jìn)的增量式Delaunay三角剖分算法構(gòu)建不規(guī)則三角網(wǎng);然后遍歷三角網(wǎng)文件,找到被三角形包含的格網(wǎng)點(diǎn),采用距離倒數(shù)加權(quán)插值法計(jì)算格網(wǎng)點(diǎn)高程,存入臨時(shí)文件;最后,將所有臨時(shí)文件排序生成規(guī)則格網(wǎng)DEM。采用基于流的處理算法,實(shí)現(xiàn)了點(diǎn)云分塊處理,解決了普通計(jì)算機(jī)處理大數(shù)據(jù)量點(diǎn)云內(nèi)存不足的問題。試驗(yàn)表明,該算法在處理大數(shù)據(jù)量點(diǎn)云時(shí),效率高,內(nèi)存占用率低,生成規(guī)則格網(wǎng)DEM的準(zhǔn)確性也非常高,能夠應(yīng)用于實(shí)際生產(chǎn)應(yīng)用中。
[1]MAUNE D F.Digital Elevation Model Technologies and Applications:The DEM Users Manual[M].[S.l.]:ASPRS,2007.
[2]ISENBURG M,LIU Y,SHEWCHUK J,et al.Streaming Computation of Delaunay Triangulations[C]∥Proceedings of ACM SIGGRAPH 2006.New York:ACM,2006:1049-1056.
[3]ISENBURG M,LINDSTROM P.Streaming Meshes[C]∥Proceedings of IEEE Visualization.Minneapolis:IEEE Computer Society,2005:231-238.
[4]ISENBURGM,LIU Y,SHEWCHUK J,et al.Generating Raster DEM from Mass Points via TIN Streaming[C]∥Proceedings of GIScience’06.Berlin:[s.n.],2006:186-198.
[5]ISENBURG M,LINDSTROM P,GUMHOLD S,et al.Large Mesh Simplification Using Processing Sequences[C]∥ Proceedings of the 14th IEEE Visualization.Washington DC:[s.n.],2003.
[6]AGARWAL P K,ARGE L,DANNER A.From LiDAR to Grid DEM:A Scalable Approach[C]∥Proceedings of International Symposium on Spatial Data Handling.[S.l.]:[s.n.],2006.
[7]CIGNONIP,MONTANIC,ROCCHINIC,et al.External Memory Management and Simplification of Huge Meshes[J].IEEE Transactions on Visualization and Computer Graphics,2003,9(4):525-537.
[8]AGARWAL P K,ARGE L,YIK.I/O-Efficient Construction of Constrained Delaunay Triangulations[C]∥Proceedings of the 13th European Symposium on Algorithms.Mallorca, Spain: Springer Verlag, 2005:355-366.
猜你喜歡
作文周刊·小學(xué)一年級版(2022年28期)2022-05-30 10:48:04
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
法律方法(2019年3期)2019-09-11 06:26:16
中國外匯(2019年7期)2019-07-13 05:44:52
幸福(2018年33期)2018-12-05 05:22:42
環(huán)球飛行(2018年7期)2018-06-27 07:26:14
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學(xué)報(bào)(哲學(xué)社會科學(xué)版)(2016年9期)2017-01-15 13:52:02
運(yùn)動(2016年6期)2016-12-01 06:33:42
