噴碼機油墨壓力的模糊PI控制系統設計*
2012-12-07 06:05:04覃舉存朱國魂
傳感器與微系統 2012年4期
關鍵詞:系統
覃舉存,朱國魂,姜 茜
(桂林電子科技大學計算機科學與工程學院,廣西桂林541004)
0 引言
噴碼機是一種廣泛應用于工廠流水線上打印產品標識的一種噴印設備。噴碼機油墨壓力的穩定對于噴碼機的噴印質量起到至關重要的作用[1]。傳統的油墨壓力控制系統主要是由模擬電路搭建起來的,其控制參數不易調節,壓力調節時間過長,存在壓力損耗問題,且噴印過程中設備的抖動,油墨閥門閉合變化帶來的擾動,控制對象參數的變化,抗干擾能力不強,往往使得系統穩定性下降。
模糊控制與常規PID控制器相比具有無需建立被控對象的數學模型,對被控對象的時滯、非線性和時變性具有較強的適應能力,對干擾和噪聲具有更強的抑制功能[2]。常規的二維模糊控制一般是按系統偏差和偏差變化率來實現對過程的控制,具有比例—微分的控制作用而不具有積分的控制作用,因而使得它在消除系統誤差方面欠佳,難以達到較高的控制精度。其主要原因是當系統響應進入穩態值附近時,模糊控制器輸入變量e與ec在模糊集合上的投影為零,使得模糊控制進入調節盲區[3]。PI控制器具有積分的控制作用,能夠消除控制系統的穩態誤差。為了彌補模糊控制器在平衡點附近的盲區缺陷,提高模糊控制精度,將PI控制引入到模糊控制器中構成優勢互補的模糊PI復合控制器[2,3],從而可以有效地改善模糊控制器的穩態性能。考慮到油墨壓力控制時滯性的特點和穩定性的要求,采用模糊PI雙模控制器以解決油墨壓力的控制問題。
1 控制對象特性
噴碼機供墨系統內部結構如圖1所示,它主要由油墨泵、壓力傳感器、控制閥門及供墨管道等部件構成。油墨在油墨泵的帶動下在內部管道形成墨流回路,在墨路導向閥門的控制下經過供墨管道對噴頭施加壓力,使得油墨能夠從噴嘴噴射出來最終形成墨線。其控制特性主要有:
1)時滯性:油墨供墨管道一般為2~4m,油墨在管道的流通會造成傳輸時延。
2)擾動性:閥門開關的閉合,油墨稠度的變化和打印噴頭的抖動都會給壓力控制帶來擾動。

圖1 供墨系統內部結構圖Fig 1 Internal structure diagram of ink delivery system
2 模糊PI雙模控制器設計
針對油墨壓力控制對象的特性,設計的模糊PI雙模控制器的結構框圖[4~6]如圖2所示。圖中,R,p分別為油墨壓力的設定值與實際壓力值,E,EC分別為油墨壓力實際值與設定值的偏差和偏差的變化率。K1,K2為模糊控制器輸入量化因子,Ku為模糊控制器輸出的比例因子。

圖2 模糊PI控制器結構框圖Fig 2 Structure block diagram of fuzzy-PI controller
模糊PI雙模控制器由PI控制器和模糊控制器組成。它結合了2種控制器的優點,既提高了系統的響應速度,又能夠消除系統的穩態誤差。因而能夠有效地對油墨壓力進行控制。模糊PI雙模控制器的控制策略為:當偏差E的絕對值大于設定的閾值k時,切換到模糊控制器,以獲取良好的動態性能,減少系統的調節時間和超調量;反之,當偏差小于閾值k時,切換到PI控制器,以提高系統的穩態精度。
2.1 模糊控制器的設計
理論上,多維模糊控制器將會帶來更高的控制精度,但是,維數越高,其控制規則越復雜,推理運算量越大,在實際應用中較少采用。因此,本設計采用二維模糊控制器,并以油墨壓力的偏差E和偏差變化率EC作為其輸入變量。其設計步驟如下:
1)控制器輸入輸出變量模糊論域與模糊子集的確立
通過對油墨壓力變化特性的分析,選取油墨壓力偏差E的物理論域為[-60,80],偏差變化率EC的物理論域為[-15,15]。兩者經過量化因子 K1,K2變換到模糊論域{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}其 中,K1=偏差E模糊語言變量的模糊子集為{HB,HM,HS,ZO,LS,LM,LB}。其中,HB 表示油墨壓力很高,HM表示油墨壓力高,HS表示油墨壓力有點高。LS則表示油墨壓力有點低,LM和LB分別表示油墨壓力低和很低。油墨壓力偏差變化率EC模糊語言變量的模糊子集EC={NB,NM,NS,ZO,PS,PM,PB}。控制器輸出變量 U 的模糊論域為{-10,10},經過量化因子Ku變換到物理論域[0%,90%],其輸出量為PWM的占空比例系數。模糊子集為{NB,NM,NS,ZO,PS,PM,PB},NB 為負大,NM 為負中,NS為負小,ZO為零,PS為正小,PM為正中,PB為正大。
2)隸屬函數的選取
為了便于模糊控制算法實現和實用性方面的考慮,模糊控制的輸入輸出變量E,EC,U選用三角函數和梯形作為其隸屬函數,E的隸屬函數曲線如圖3,輸出變量U的隸屬函數如圖4所示。
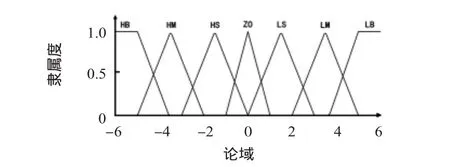
圖3 輸入變量E的隸屬函數Fig 3 Membership function of input variable E

圖4 輸出變量U的隸屬函數Fig 4 Membership function of output variable U
3)模糊控制規則的建立
模糊控制規則的建立主要是在操作經驗的基礎上進行的,它包含了現場可能出現的各種情況[6]。模糊控制規則的建立選用歸納法,其選取的原則是:當油墨壓力偏差大或較大時,加大控制量以盡快消除誤差;當偏差較小時,減小控制量以防止超調。例如,當EC為負時表明壓力有上漲的趨勢,如果此時壓力高,則應當減少油墨泵的轉速以降低油墨壓力。用模糊條件語句表示如下:

……據此,得出如表1所示的7×7=49條規則。
2.2 PI控制
PI控制比例積分控制的控制作用,它能夠有效地消除系統穩態誤差。當系統偏差較小時,采用PI控制。PI的位置式離散化控制規律為
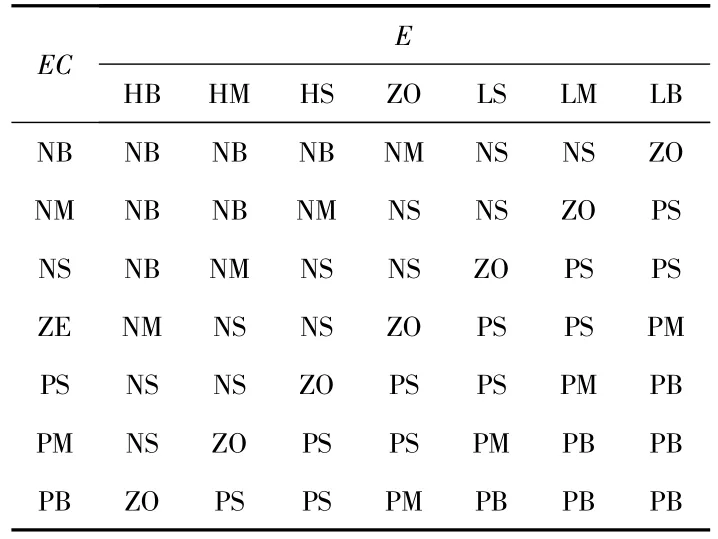
表1 模糊控制規則表Tab 1 Table of fuzzy control rule

式中 kp為比例系數,ki為積分系數,T為采樣周期,k為采樣序號,e(k)為第k時刻所得的偏差信號。
3 油墨壓力控制系統設計
油墨壓力控制系統采用Altera公司的FPGA芯片EP3C16F484為控制器核心。其系統結構如圖5所示。油墨壓力的模糊PI控制算法是在基于NiosII軟核的SOPC系統中實現。油墨壓力的檢測通過壓力傳感器和A/D轉換器來完成。其中,壓力傳感器主要是利用了半導體的壓阻效應來實現,它是由特制的4只應變計構成惠斯登電橋,并經過特定處理后放置到油墨導管中。由惠斯登電橋的工作原理可知,當油墨壓力的變化導致電橋失去平衡后將會反映到電橋兩端的輸出信號中,因而,通過將輸出信號放大并經過A/D轉換采集便可測得油墨的壓力數據。

圖5 油墨壓力控制系統結構框圖Fig 5 Structure block diagram of the ink pressure control system
實際中,壓力的可測范圍為0~250 bar,控制器根據采集到的實際油墨壓力數據與設定的壓力數據計算出油墨壓力的偏差和偏差變化率。并以此作為模糊PI控制器輸入,經內部推理運算后,再經過FPGA內部的PWM信號產生模塊輸出一個占空比可調的方波信號,其占空比由模糊PI控制器運算得出,占空比調節范圍0%~90%。輸出的PWM需要經過電壓提升之后再經過光耦隔離電路輸出作為功率管的控制信號,從而調節油墨泵電機的轉速,進而達到調節油墨壓力。
4 系統測試結果
將模糊PI控制器應用到油墨壓力控制中,并通過與現有的油墨壓力控制系統進行對比來驗證其控制性能。測試中,油墨泵電機的參數為:額定工作電壓為24 V,電流為3 A,流量范圍為5~40 000 mL/min。實際輸出 PWM頻率21 kHz,占空比最大為90%,功率管最大輸出電流10 A。圖6是給定系統油墨壓力值193 bar,并對輸出信號進行采樣,做圖得出的系統響應曲線。其中,采樣周期為0.5 s。由圖可看出:設計的模糊PI控制器能夠有效地對油墨壓力進行控制,與現有的控制器控制效果相比,超調量較小,響應速度較快,平均調節時間縮短了7s,控制精度得到較大提升。

圖6 給定壓力下系統響應曲線Fig 6 Response curve of system under a given pressure
為了驗證系統的抗干擾能力,在系統達到穩定壓力值200bar后,通過對閥門的閉合控制使墨路發生變化,從而使得油墨壓力變化,并對油墨壓力輸出信號進行采樣。圖7是系統在加入擾動信號作用下的輸出曲線。由圖可看出:當擾動引起油墨壓力變化時,系統能夠及時地對壓力進行調整,在擾動發生10 s后,油墨壓力回到正常值。可見系統具有較好的擾動抑制能力。
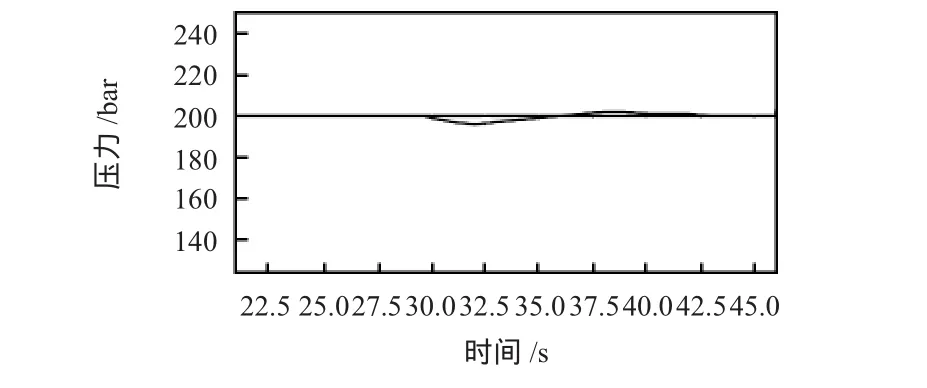
圖7 擾動狀態下系統輸出曲線Fig 7 Output curve of the system with disturbance
5 結論
利用PI控制和模糊控制各自的優點,將PI控制與模糊控制構成優勢互補的雙模控制器。并將其應用到具有時滯特性的噴碼機油墨壓力控制系統中,仿真與實際測試結果表明:設計的模糊PI控制器能夠有效地解決噴碼機油墨壓力控制的問題。與傳統的控制效果相比,具有較快的響應速度,縮短了調節時間,其對閥門的閉合,設備的抖動帶來的擾動具有較強的抑制能力。
[1]Maruschock G R.A system to analyze continuous ink jet droplets[D].Pittsburgh:University of Pittsburgh,2004:30-36.
[2]諸 靜.模糊控制原理與應用[M].北京:機械工業出版社,2005.
[3]模糊控制及其 Matlab仿真[M].北京:清華大學出版社,2008.
[4]丘建峰,李亮玉.Fuzzy-PI控制器在水溫控制系統中的應用[J].天津工業大學學報,2006,25(2):66-67.
[5]Mu?oz-César,Merchán-Cruz.Speed control of a DC brush motor with conventional PID and fuzzy-PI controllers[C]∥Conference on Electronics,Robotics and Automotive Mechanics,Cuernavaca,2008:345-346.
[6]劉宏偉.基于單片機的模糊控制方法及應用研究[D].武漢:武漢理工大學,2007:26-33.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32