人工心臟差分渦流位移傳感器的性能測試裝置*
2012-12-07 06:05:26談雪丹尹成科馬云善張亦柯
傳感器與微系統 2012年5期
談雪丹,尹成科,2,陳 琛,2,馬云善,張亦柯
(1.蘇州同心醫療器械有限公司,江蘇蘇州215123;2.蘇州大學人工心臟研究所,江蘇 蘇州215021)
0 引言
由于心臟供體的缺乏,人工心臟已逐漸成為挽救終末期心力衰竭患者的重要手段,降低因等待心臟移植而導致的死亡率[1]。第三代人工心臟由于采用懸浮技術[2],不存在軸承磨損問題,具有使用耐久性高、溶血少、血栓發生率較低[3]等特點,近年來得到了快速發展。國內人工心臟研究也取得了許多進展,研制成功了人工心臟樣機[4]。
渦流位移傳感器裝置是人工心臟的核心部件之一,其檢測靈敏度與線性度直接影響到人工心臟磁懸浮系統的控制精度。因此,準確進行傳感器性能測試,掌握傳感器實際工作特性,對提高人工心臟的可靠性與穩定性有著重要意義。
已有的渦流位移傳感器性能測試裝置與方法中,多采用扁平圓盤作為測試靶板,進行單一測量方向上傳感器的性能測試[5~8]。對于具有二自由度和多于二自由度的多傳感器結構,上述裝置只能分別針對各方向,多次安裝并測試傳感器。這種操作可能引入安裝上的誤差,降低整個傳感器性能測試的精度。
第三代人工心臟采用了磁懸浮軸承技術,利用2路差分式渦流傳感器探頭測量轉子位置,從而進行二自由度位移主動控制。傳感器探頭位于環形轉子的內環中心處,即測試靶板為環形封閉結構,需進行二自由度測量方向的性能測試,為此,本文設計了一種基于正交坐標系的性能測試裝置,可以實現二自由度的渦流位移傳感器精確性能測試。
1 渦流傳感器基本原理
渦流傳感器主要包括傳感器線圈、前置器和被測金屬導體組成,利用電磁感應原理與渦流效應原理進行探測傳感器與導體之間的間隙。如圖1所示,由前置器產生的高頻電流激勵探頭端部的傳感器線圈時,會在線圈中產生磁場Φ1。根據電磁感應原理,當金屬導體在Φ1的有效范圍內運動時,導體會產生渦流,渦流將產生一個阻礙原磁場Φ1變化的渦流磁場Φ2,從而使得傳感器線圈的等效阻抗發生改變。線圈阻抗的變化與金屬導體的電阻率、導磁率、厚度以及線圈與金屬導體的間隙等參數有關。因此,若保持其余參數恒定,線圈與導體間的間隙變化量僅與線圈阻抗的變化量有關,從而將位移量轉換成可測量的電信號。
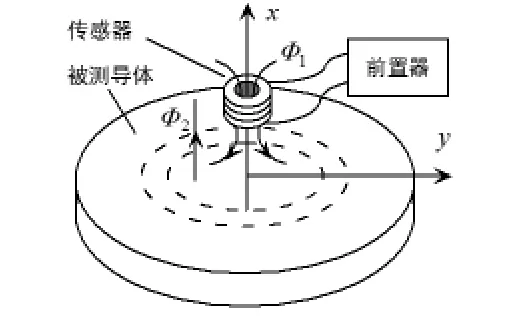
圖1 渦流傳感器原理Fig 1 Principle of eddy current sensor
2 人工心臟傳感器結構與工作機理
人工心臟差分式渦流位移傳感器結構如圖2所示。

圖2 人工心臟傳感器結構Fig 2 Sensor structure of artificial heart
圖2中,4只渦流傳感器均是由漆包線繞制而成的扁平圓線圈,固定在不導電的非磁性材料骨架上,構成傳感器探頭并固定于定子上。在盤狀轉子的徑向面建立正交坐標系,轉子內環中心點為坐標原點,則4只傳感器線圈分別位于x,y兩軸正負4個方向上,且同一自由度的2只傳感器串聯。由于采用磁懸浮技術,無需機械軸承,轉子可采用中空環形結構。傳感器探頭位于環形轉子內環中心處,當轉子相對于定子發生位移時,傳感器線圈與轉子的相對間隙也隨之發生變化,從而引起傳感器線圈阻抗的變化。
以人工心臟徑向x軸為例,其傳感器等效電路如圖3所示。
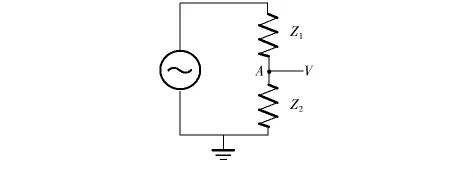
圖3 差分式傳感器等效電路圖Fig 3 Equivalent circuit of differential sensors
當轉子靠近線圈1時,同時也遠離位于同軸相反方向的線圈2。根據渦流效應可知,此時線圈1的等效阻抗Z1實部增大,虛部減小,線圈2的等效阻抗Z2變化剛好相反。傳感器線圈阻抗變化引起圖中A點電壓V的變化,即實現位移—阻抗—電壓的變換。V變化值再經過放大、檢波、濾波調整后,用來控制該方向的位移。
人工心臟渦流位移傳感器采用差分結構,可以抵消傳感線圈的非線性影響,同時有助于消除由于電源電壓、頻率和環境溫度變化引起的傳感器自身誤差,提高了磁懸浮系統的性能。
3 傳感器性能測試裝置
如圖4所示,性能測試裝置主要由可調節支架、微位移機構、千分尺手輪及FRA 5097阻抗分析儀組成。轉子夾持在固定的性能測試裝置的臺架上,待測試的差分式渦流位移傳感器探頭安裝在微位移機構上。裝置設有2個相互正交的千分尺手輪,分別表征坐標系的x軸與y軸。
性能測試時,首先對被夾持的轉子進行調整,使得傳感器探頭位于轉子內環適當位置。然后保持轉子不動,緩慢轉動千分尺手輪,帶動傳感器探頭產生徑向(x軸、y軸)的微小位移,渦流傳感器阻抗也隨之變化,位移量大小與阻抗變化量分別由手輪上的刻度與阻抗分析儀讀出。
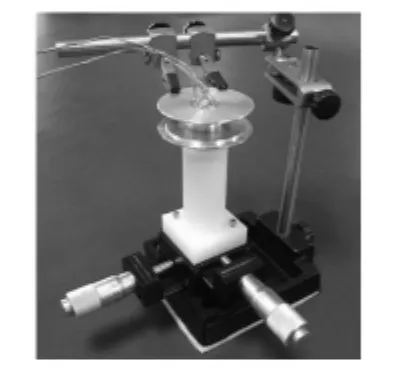
圖4 渦流傳感器性能測試裝置Fig 4 Performance testing device of eddy current sensor
4 性能測試與結果分析
人工心臟對轉子進行二自由度位移控制,每個自由度的傳感器探頭測量范圍設計值均為±0.5 mm。對2個自由度分別進行傳感器性能測試:首先將傳感器探頭調至某自由度的負端,此時,該自由度的2個傳感器阻抗差值最大,而另一自由度阻抗差值最小;然后每個自由度均按正反2個行程,每隔0.05 mm移動一次傳感器探頭,測量并記錄該自由度的傳感器阻抗數據。
將實驗數據進行最小二乘法線擬合處理,獲得傳感器靈敏度與線性度。以一組x軸正反行程的實驗數據為例,2個傳感器線圈歸一化阻抗與位移量數據如圖5(a),(b)所示,從圖5中可以看出:當傳感器探頭與轉子相對間隙發生變化時,處于同一自由度相反方向的2個線圈阻抗變化趨勢是相反的。
首先計算單行程的差分渦流傳感器阻抗變化量,然后利用正反行程的阻抗變化均值與轉子位移量進行線性擬合,得到轉子位移量Δx與差分渦流位移傳感器的阻抗變化量Δz的輸入—輸出特性。傳感器探頭測量范圍設計值為±0.5 mm,然而實際工作中,轉子發生±0.5 mm的位移時磁懸浮已經失效,因此,考察±0.25 mm內的傳感器靈敏度與線性度即可,見式(1),其擬合直線如圖6所示。
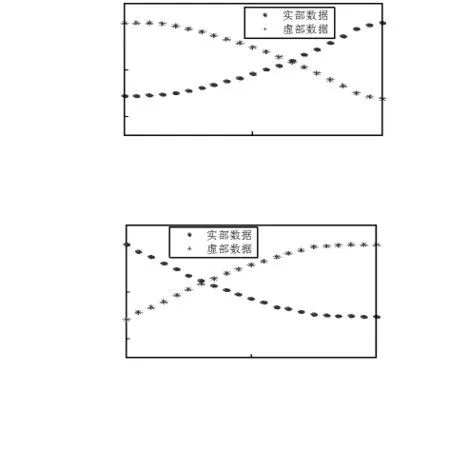
圖5 x軸渦流傳感器阻抗數據Fig 5 Impedance data of x-axis eddy current sensor

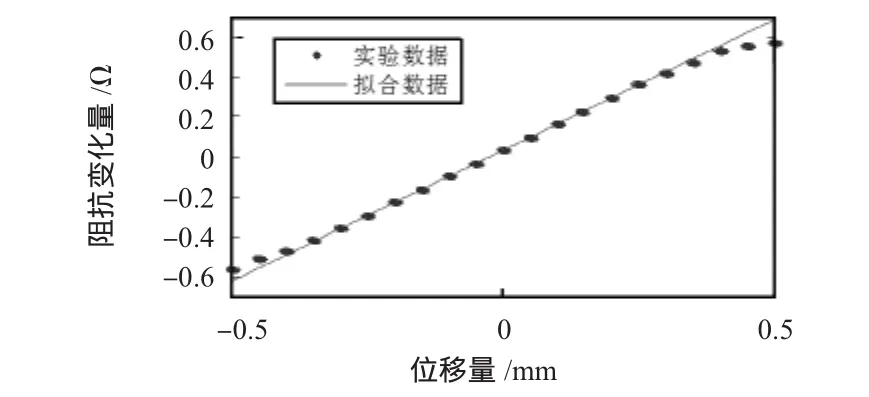
圖6 差分渦流傳感器位移—阻抗特性Fig 6 Displacement-impedance property of differential eddy current sensor
圖6中,該方向差分渦流傳感器在±0.25mm內的靈敏度為1.3142Ω/mm,性能良好,可以滿足人工心臟磁懸浮系統的控制精度要求。對比圖5與圖6,可以看出:該自由度差分特性的線性度明顯優于單個傳感器線圈的檢測線性度,經計算該差分傳感器在±0.25 mm內的線性度[8]為0.49%,阻抗變化與位移量基本呈線性關系,可以用于探測磁懸浮轉子的位置。
5 結論
本文根據人工心臟磁懸浮技術特點,針對現有渦流傳感器性能測試裝置的不足,研制開發了一種正交坐標系的測試裝置,完成了差分式位移渦流傳感器二自由度的精確測試,為進一步提高人工心臟磁懸浮控制性能提供了可靠依據。
[1]Timms D.A review of clinical ventricular assist devices[J].Medical Engineering & Physics,2011,22(9):1041-1047.
[2]Hideo H,Shinshi T,Takatani S.Third-generation blood pumps with mechanical noncontact magnetic bearings[J].Artificial Organs,2006,30(5):324-338.
[3]郭龍輝,張杰民,劉曉程.第三代血泵的研究進展[J].中國胸心血管外科臨床雜志,2010,17(4):321-325.
[4]張文禮,馮 峰.海歸博士領銜創業中國“人工心臟”躋身世界前列[J].中國機電工業,2010(8):118-120.
[5]李 博,翁 瑩,佟海云.電渦流傳感器在汽輪發電機組的應用及標定[J].包鋼科技,2005,31(5):36-38.
[6]王天娜.電渦流傳感器自動靜標定系統與實驗研究[D].北京:北京化工大學,2008.
[7]丁美瑩.位移傳感器的靜態自動標定與實驗研究[D].北京:北京化工大學,2010.
[8]徐 龍,陳良洲,文 丹.結合LabVIEW的電渦流傳感器研制及標定[J].實驗室研究與探索,2011,30(2):9-11.