基于AMI 602傳感器的載體姿態測試系統
2012-12-07 06:54:52陳志保常丹華朱紹圖
傳感器與微系統 2012年5期
荊 雷,陳志保,常丹華,朱紹圖
(燕山大學信息科學與工程學院,河北秦皇島066004)
0 引言
姿態分析儀是現代社會中的一種非常重要的測試工具,人們通過它可以更加便捷地確定物體的航向和姿態信息。傳統的姿態測量系統主要由高精度的陀螺儀和加速度傳感器組成,需要外接信號調理電路和A/D轉換器,其結構復雜、體積較大、成本較高,無法實現設備的小型化、便攜化和商品化。
本文設計的姿態測量系統是由基于數字輸出的6維動作傳感器而研制,該傳感器集三軸加速度傳感器和三軸地磁傳感器于一體,且內部包含A/D轉換電路、放大信號調理電路和補償電路。與傳統的加速度傳感器與地磁傳感器在外部結合的捷聯式設計相比,該系統提高了抗外界干擾的能力、消除了2只傳感器之間的坐標誤差,并且能夠全方位準確地測量姿態角的角度,具有較高的精度[1]。由于6維動作傳感器是數字輸出,支持I2C協議,因此,其抗干擾能力優于模擬輸出的傳感器,同時便于同微處理器進行通信。
1 系統設計方案
本文設計的姿態測試系統主要由兩部分組成,即數據采集系統和數據接收系統。數據采集系統負責將傳感器輸出的6維數字信號經微處理器發射出去。數據接收系統負責接收發射端發射來的數據。接收端接收到的數據通過串口發送到PC機上進行數據的處理。系統的整體結構框圖如圖1所示。
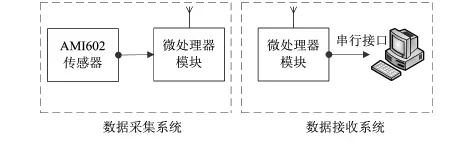
圖1 系統整體結構框圖Fig 1 Overall structure block diagram of system
2 硬件電路設計
2.1 傳感器模塊
一般捷聯式姿態測試系統采用的是雙軸加速度傳感器和三軸地磁傳感器,需要外接A/D轉換器、信號調理等電路,結構比較復雜,存在外界的干擾信號,精確度難以保證[2]。而本系統采用的是AMI 602動作傳感器進行測量,A/D轉換在芯片內部完成,也不需要對2只傳感器的坐標系進行校正,同時解決了5維傳感器對俯仰角、橫滾角測量角度很難大于70°的局限性,如圖2所示。
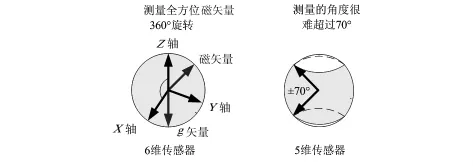
圖2 6維傳感器與5維傳感器角度測量對比Fig 2 Comparison of angle measurement of 6D sensor and 5D sensor
AMI 602傳感器是由日本愛知制鋼公司2008年7月推出的一種具有數字輸出的動作傳感器。AMI 602動作傳感器主要包含三軸加速度傳感器與三軸地磁傳感器以及控制器IC。控制器IC包含地磁信號檢測電路、能夠補償每軸偏移和設置靈敏度的放大電路、溫度傳感器、12位ADC、I2C串行輸出電路、恒壓電路及控制它們的8032微處理器[3]。內部結構框圖如圖3所示。

圖3 AMI602傳感器內部結構框圖Fig 3 Inner structure block diagram of AMI602 sensor
2.2 微處理器模塊
本系統選擇由德州儀器推出的一種專為低功耗和低壓無線應用而設計的CC1110單片機作為微處理器。芯片內部包含了一個符合工業標準的增強型8051MCU和一個無線收發芯片CC1100。采用32.768 kHz低速晶振和26 MHz高速晶振,方便系統根據不同需要進行靈活設置。每兆赫茲下微處理器的執行速度是普通8051內核的8倍。8051MCU自帶4kB RAM,具有一個16位的定時器,支持定時、計數、輸入捕獲等功能,具有3個8位的定時器,一個看門狗定時器。具有4種工作模式,PM0~PM3,其中,PM0為正常工作模式,PM1~PM3為低功耗模式。實際應用中可以根據需要,選擇不同的工作模式來降低系統功耗[4]。
3 姿態角的求解
3.1 坐標原點的標定
直接從傳感器所測得的數據(x',y',z')和真實數據(x,y,z)的坐標原點存在著偏移量OO',會對后續的姿態角的計算帶來影響,如圖4所示,所以,首先必須對CC1110傳輸來的各軸數據進行調零處理。由于重力加速度和磁場強度在垂直方向上的大小都是常量,所以,將三軸分別垂直向上和垂直向下測得的重力加速度和磁場強度數據進行平分,使其各軸在垂直向上和向下時的數據值大小相等,同時在數據中加一位符號位,規定任意軸指向上方為正,指向下方為負,最后將傳感器測得的數據進行轉換。

圖4 坐標原點的偏移量補償Fig 4 Offset compensation of coordinate origin point
3.2 姿態角的推導
由圖5可推證有下式成立

俯仰角、橫滾角、磁偏航角分別為
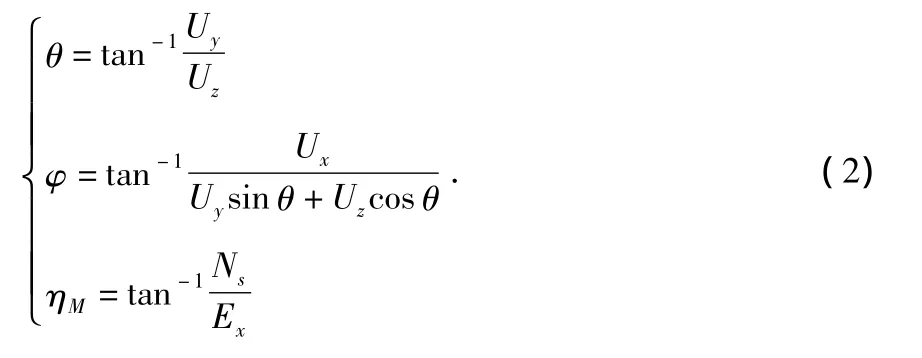

圖5 載體姿態與地理坐標系之間的關系Fig 5 Relation between carrier attitude and geo-coordinate system
載體在空間中的姿態是相對于地理坐標系的運動來表示的,運動的角度稱為載體的姿態角,包括俯仰角、橫滾角和偏航角,如圖5。本文通過重力加速度G和磁場強度M,運用“左手法則”確定3維地理坐標系O'e'xe'ye'z,地理坐標系是系統的參考坐標系,載體坐標系設為Oexeyez,式(1)表示傳感器測得的6維數據在地理坐標系下所對應的值,式(2)為俯仰角θ、橫滾角φ、磁偏航角ηM的計算公式[5]。
4 實驗結果測試與分析
為了能夠更準確地顯示出測量的真實值,測量實驗在水平臺面上進行,用角度測量儀對角度進行標定,測量結果以文本方式保存起來,每個姿態角隨機各選取了9個度數進行測量,每個角度測量了5次,結果如表1~表3所示。
由上述的測量數據可以看出:在 0°,90°,180°,270°這幾個特殊度數左右存在數據符號的正負變換,所以,必須做模糊處理以保證角度的正確性。測量結果表明:該系統具有較高的分辨率,精度在±0.5°以內,可用于一般民用的姿態測試系統的應用。
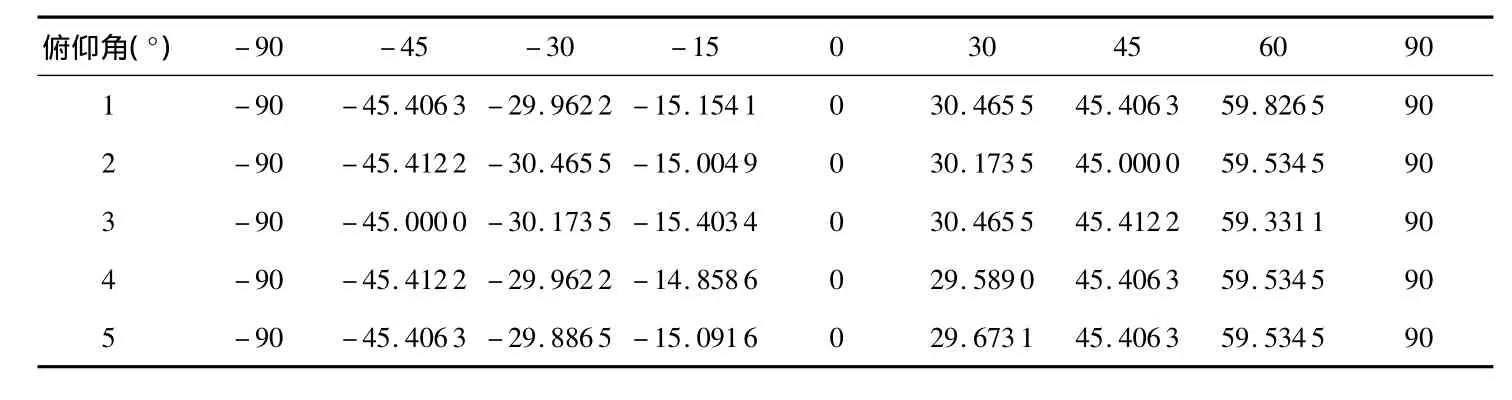
表1 俯仰角標準值與測量值對比Tab 1 Comparison of standard and measurement value of pitch angle

表2 橫滾角標準值與測量值對比Tab 2 Comparison of standard and measurement value of roll angle

表3 偏航角標準值與測量值對比Tab 3 Comparison of standard and measurement value of heading angle
5 結束語
本文詳細介紹了一種基于AMI 602的6維動作傳感器的空間姿態的測量系統。采用AMI 602傳感器能大大縮小系統的體積,降低系統功耗,提高了方位精度,同時使系統的可靠性得到了顯著的提高。該系統具有很好的工程實用價值,適合在各種導航、游戲設備、嵌入式裝置及3D鼠標等上使用。由于在運動過程中有動態加速度的存在,會給測量精度帶來一定的影響,為了解決這一問題,可以結合其他設備提供的動態加速度信息進行校正[8]。
[1]鮑松堂.磁阻傳感器及其在飛行體姿態測試中的應用[J].五邑大學學報:自然科學版,2010,24(2):52-55.
[2]馬建倉,胡士峰,邵婷婷.三軸磁阻電子羅盤設計[J].火力與指揮控制,2009,34(3):142-144.
[3]AMI602 Datasheet.Aichi Micro Intelligent Corporation[EB/OL].[2010—11—13]http:∥www.aichi-mi.com.
[4]CC1110 Datasheet.Texas Instruments[EB/OL].[2010—11—13]http:www.ti.com.
[5]李懷昆.電子羅盤中磁場測量系與重力場測量系之間關系的研究[D].哈爾濱:哈爾濱工程大學,2007.
[6]王解先,李浩軍.磁偏角與磁傾角的公式推導與運算[J].大地測量與地球動力學,2009,29(3):88-94.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45