基于區域電壓距離的無功補償投入的研究
2012-12-05 03:23:44劉俊勇
四川電力技術 2012年2期
朱 覓,劉俊勇
(四川大學電氣信息學院,四川成都 610065)
0 引言
無功補償是電力系統安全經濟運行的一個重要組成部分。電力系統的安全性和經濟性與無功補償節點的選擇和無功補償的投切密切相關。合理地選擇無功補償點,并對電力系統無功電源進行合理配置,再合理地投入系統運行,能夠有效地維持電壓水平并提高電力系統運行的穩定性,還可避免無功的遠距離傳輸,從而降低有功網損和無功網損,使電力系統能夠安全經濟運行。
迄今為止,國內外電壓弱節點及其補償的研究主要集中在無功補償點的確定[2-6],而其中系統在運行到何種狀態下投入無功補償僅只是憑借運行人員工作經驗,鮮少見有對具體投切方面的研究。文獻[2]利用無功裕度的排序確定了無功補償點;文獻[3]在對臨界電壓和臨界功率在靜態電壓穩定極限作用進行分析,對簡單交流電路的電壓電流特性進行討論后,提出了確定電力系統無功補償點的一種方法;文獻[4-6]分別運用協同進化法、遺傳禁忌混合算法、改進的免疫遺傳算法確定無功補償點。
電壓質量的提高是無功補償的顯著特征,研究人員提出了多種基于主導節點的電壓控制方法[7-8]。但在實際電網中的電壓越限時主導節點無法控制繼而引起控制失效的情況要求了主導節點的可控性,這說明主導節點必須在具有無功補償設備的節點中進行選擇。但是,當具有無功補償設備的節點不能很好地代表整個區域地電壓水平時,主導節點法將失去其優勢。
鑒于上述原因,在無功補償點確定的基礎上,提出了系統無功補償最優投入參數模型,建立了區域電壓距離來衡量無功補償投入參數的優劣,并得出了該模型下的最優投入參數方案。最后在IEEE—30節點系統中進行了仿真計算校驗。
1 無功補償投入參數模型
1.1 區域的劃分
電力系統中大多數的控制或擾動僅對其發生點附近與其聯系緊密的節點的運行有較大影響,而那些在電氣上遠離該點的節點所受影響是很微小的,因此,最好的電壓無功控制方法是按區域來進行。
電氣距離實際就是節點間相互聯系的緊密程度,采用某一節點的電壓變化幅值 ΔV對另一節點處無功功率變化ΔQ的靈敏度來表示,電氣距離大說明電氣上相隔較遠,相互間影響小;電氣距離小說明電氣上聯系緊密,相互影響大,可以劃分在同一個控制分區中。
根據牛頓-拉夫遜潮流計算法可以得到下式。

其中,ΔP和ΔQ分別為節點注入有功功率和無功功率的變化;Δθ和ΔV分別為節點電壓相角和幅值的變化量。由于有功與電壓間屬于弱耦合關系,因此,假設ΔP=0,得到下式。

式中,S=[JQV-JQθ-Jqθ-1Jpv]-1,即為電壓幅值變化對無功功率變化的靈敏度矩陣。
其元素Sij表示節點j處的無功功率注入變化一個單位時,節點i處的電壓幅值的變化量。一般情況下雖然Sij≠Sji,但它們往往非常接近,所以可用(Sij+Sji)/2或簡單地以Sij來衡量節點i和j之間電氣距離的大小。

如果電氣距離Sij大,則節點i與節點j耦合強度大,聯系緊密;如果Sij小,則節點i與節點j耦合強度小,聯系弱。
所考慮的是無功補償容量和地點固定情況下,哪種狀態投入無功補償最優,因此,選取無功補償節點為中樞點對系統進行分區。
1.2 無功補償投入參數指標構建
隨著負荷的持續增長或網絡中有突發故障時,系統中局部或全部母線電壓向臨界崩潰點逼近,此時對系統進行無功補償,則電壓回升。當無功補償點確定時,由于不同運行狀態下投入無功補償,節點電壓回升到不同數值,對應網絡損耗也會不同。因此,在系統運行到何種狀態下投入無功補償則成為了系統電壓穩定和經濟運行的關鍵:一方面,在不適當的狀態下投入無功補償,電壓可能不能回升到足夠穩定的數值,此時的網絡損耗也相應較大;另一方面,在不適當的狀態下投入無功補償,可能會出現無功過補償現象。若經常出現過補與欠補,則設備常處于設備閑置狀態,利用率低,無功補償效果不理想,浪費投資。
電壓是電能質量的重要標志。供給用戶的電壓與額定電壓值的偏移不超過規定的數值,是電力系統運行調整的基本任務之一。各種用電設備是按照額定電壓來設計制造的,只有在額定電壓下運行才能取得最佳的工作效率。且電壓能直觀地反應無功補償需求,因此選擇電壓作為無功補償的投入參數,根據其數值來確定具體在何種狀態下投入無功補償。
系統的電壓穩定與投入無功補償后節點恢復到的電壓有關,其值越接近額定值,電壓允許波動范圍越大。為此,定義節點電壓距離得

其中,Ui為投入無功補償后恢復到安全范圍內的節點電壓;Un為額定電壓;UB為系統基準電壓。ηi量化的是在投入無功補償后節點電壓的恢復水平。它能直觀地表征各節點投入無功補償后電壓與額定電壓的遠近程度。
由前所述,無功功率具有較強的區域解耦特性,因此,需要對無功補償的區域進行有效界定,定義區域電壓距離。
定義區域電壓距離得

其中,i為區域內無功補償點;j為前述電氣分區所得到的在i所屬區域內的點。
區域電壓距離λ量化的是在區域內投入無功補償后與最佳運行點的距離。由于在電壓回升的過程中,各節點電壓不是同時到達允許范圍,因此,在某一時刻,以此刻區域內所有節點電壓距離之和作為區域的電壓距離,能真實地反應當前區域的運行狀態。區域電壓距離越小,各節點越接近穩定運行電壓,區域電壓越穩定;反之,區域電壓距離越大,各節點電壓離穩定運行電壓越遠,區域電壓趨向不穩定。
2 最優投入參數的計算
2.1 目標函數
由前節所述,合理地選擇無功補償投入參數,不僅可以提高電壓穩定性,而且能減少網絡損耗。因此,以區域電壓距離最小作為目標函數,即

2.2 約束條件
等式約束方程為功率平衡方程。
式中,Pi、Qi表示節點 i的注入有功、無功,由于不同的網絡狀態,有不同的無功補償投入參數,相應地有不同的有功功率Pi(t)和無功功率Qi(t);Ui、Uj為節點 i,j的電壓;Gij、Bij為節點 i、j之前的電導、電納;θij為節點i、j之前的電壓相角差;j∈i表示所有與節點i相連的節點。
不等式約束方程如下。

式中,t為無功補償投入參數;U為節點電壓狀態變量,各變量均在上下限約束中。
2.3 基于粒子群算法的投入參數計算
基于粒子群算法(particle swarm optimization,PSO)具有全局最優、算法簡單、計算快速、易于實現、收斂性高等優點,因此選取此方法對何種狀態下投入無功補償最優這個問題進行求解。
(1)迭代公式。每個粒子代表一個無功補償投入系統參數,在每一次迭代中,粒子通過跟蹤兩個“極值”來更新自己:一個是個體極值pbest,即粒子先前的最佳位置;另一個是全局極值gbest,即所有粒子中最佳粒子的指數。在找到這兩個最優解時,粒子根據以下公式來更新自己的速度和新的位置。
式中,下標i代表第i個粒子,下標j代表速度(或位置)的第j維,上標k表示迭代代數。ωk為上一代速度對于當前速度影響的權重,該值從大到小變化;vkij和xijk分別表示第i個粒子在第k次迭代中第j維的速度和位置;c1和 c2是學習因子,通常 c1、c2∈[0,4];r1和 r2是介于[0,1]之間的隨機數;pbestijk是第i個粒子在第j維的個體極值的坐標;gbestijk是群體在第j維的全局極值的坐標。
(2)編碼和適應度函數。PSO算法解決優化問題的過程中有兩個重要的步驟:問題解的編碼和適應度函數。
無功補償投入參數t采用實數編碼,即t={t1,t2,…,tn},其中 ti為實數。
粒子群適應度函數一般取目標函數最大值,選取模型中的目標相反數作為適應度函數,即λ’= -λ。
2.4 計算步驟
第1步:根據各無功補償投入系統的限制條件,對群體中的個體進行隨機初始化。在正常運行情況下,讓負荷按照一定方式增長,當無功補償點電壓降低到臨界點時停止計算,隨機抽取負荷增長過程中的節點電壓;在突發故障情況下,計算各故障下無功補償點最低電壓,隨機抽取無功補償點由正常運行電壓到最低電壓中的節點電壓。
第2步:根據適應度函數計算群體中每個個體的適應度函數值xi。
第3步:將每個個體的評價值同pbest值進行比較,pbest值中最好的評價值表示為gbest。
第4步:根據式(6)對每個個體xi的粒子速率和位置進行修改。
第5步:如果每個個體的適應度函數值優先于先前的pbest,則把當前值設為pbest。如果優于gbest,則把值設為gbest。
第6步:如果迭代次數到達最大值,則進行第7步。否則,從第2步開始。
第7步:產生最新gbest的個體,為各無功補償點的最佳無功補償投入參數。
3 算例分析
采用IEEE-30節點標準系統為例說明所提出方法的有效性。IEEE-30節點標準系統包括6條發電機母線、21條負荷母線和43條支路。在節點7、19、30并聯電容器進行無功補償。電容器容量分別取兩組不同的值,第一組為 12 Mvar、18 Mvar、12 Mvar,第二組為18 Mvar、27 Mvar、18 Mvar。在仿真計算中將IEEE-30節點系統中的發電機設為PV節點。
按所述分區方法將系統劃分為3個區域,見表1。
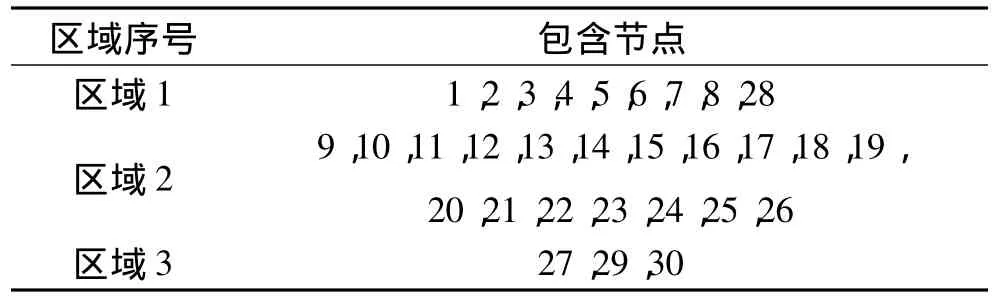
表1 區域劃分結果
3.1 情況1負荷持續增加
在滿足電壓穩定條件下,負荷按照一定方式增長時,由參考文獻[9]方法得到各負荷節點臨界電壓如表2所示。
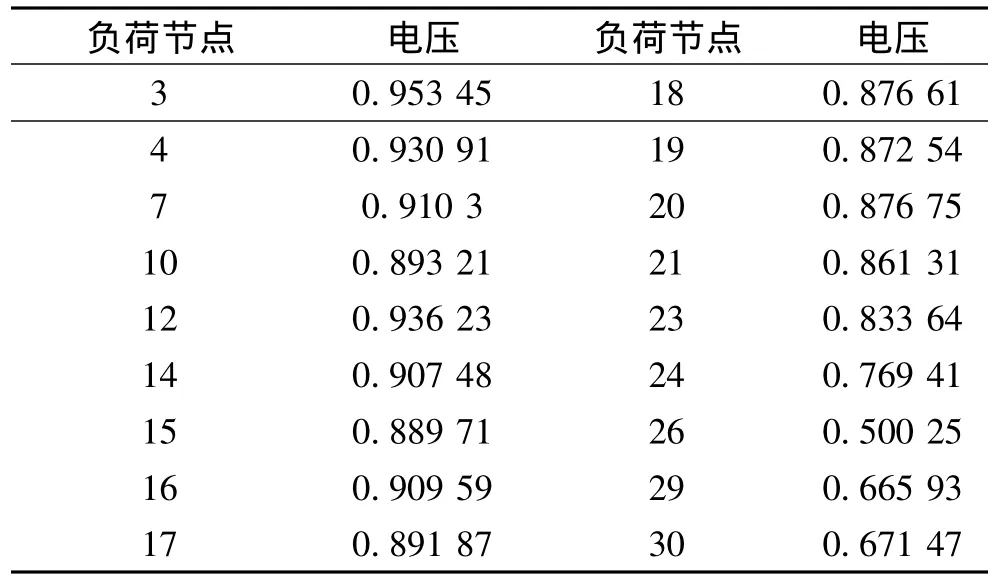
表2 臨界情況時節點電壓表
運用粒子群算法對何種狀態下投入無功補償最佳進行求解。粒子群大小為100,學習因子c1和c2取2,速度影響權重ω隨迭代次數從0.9到0變化,最大迭代次數為150。
按步驟求取3個補償點投入電容器組時的最佳投入參數與最小區域電壓距離,再計算出對應的系統網損,并與傳統的按照電壓低于95%時投入無功補償相比較,第一組容量的電容器的計算結果如表3所示。

表3 無功補償投入系統方案1
表3中,投入參數為各節點電壓額定值的百分數,即在電壓降至這個數值時,投入無功補償。95%為設定的傳統投入參數,96.4%、96.5%、95.7% 分別為用粒子群算法計算出的無功補償點7、19、30的無功補償投入參數。區域電壓距離和網絡損耗則分別是在這些投入參數進行無功補償后,系統恢復到穩定時的值。
圖1為負荷持續增加的情況下,由第一組變容器按照傳統方案與考慮投入參數方案進行無功補償后的各負荷節點電壓效果對比圖。
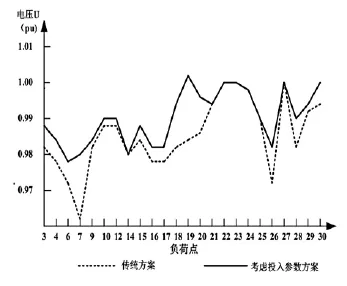
圖1 負荷持續增長時兩方案電壓效果對比
在負荷持續增加的情況下,由第2組較多容量變容器進行補償的計算結果如表4所示。
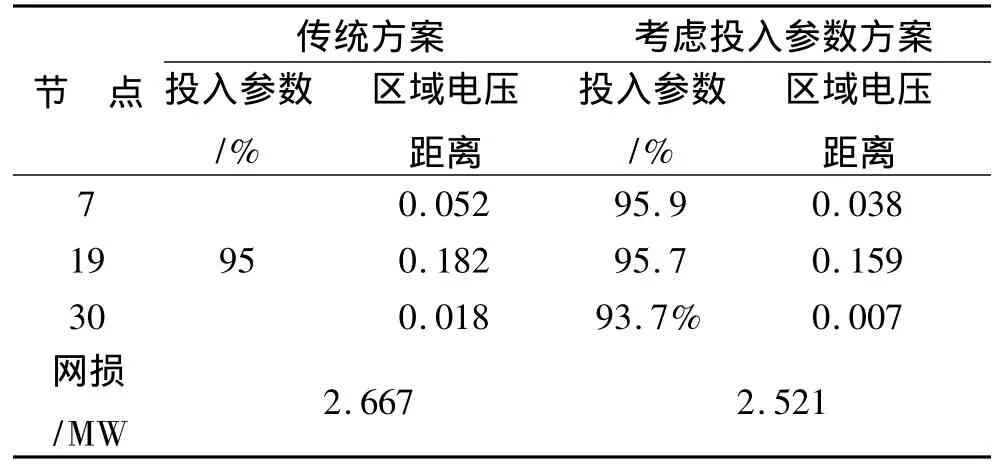
表4 無功補償投入系統方案2
圖2為負荷持續增加的情況下,由第2組變容器按照傳統方案與考慮投入參數方案進行無功補償后的各負荷節點電壓效果對比圖。
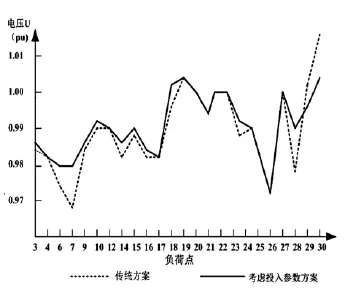
圖2 負荷持續增長時兩方案電壓效果對比
3.2 情況2突發故障
在N-1故障情況下,對所選網絡進行計算。表5列出了N-1故障情況下部分故障類型及故障時無功補償點電壓情況。
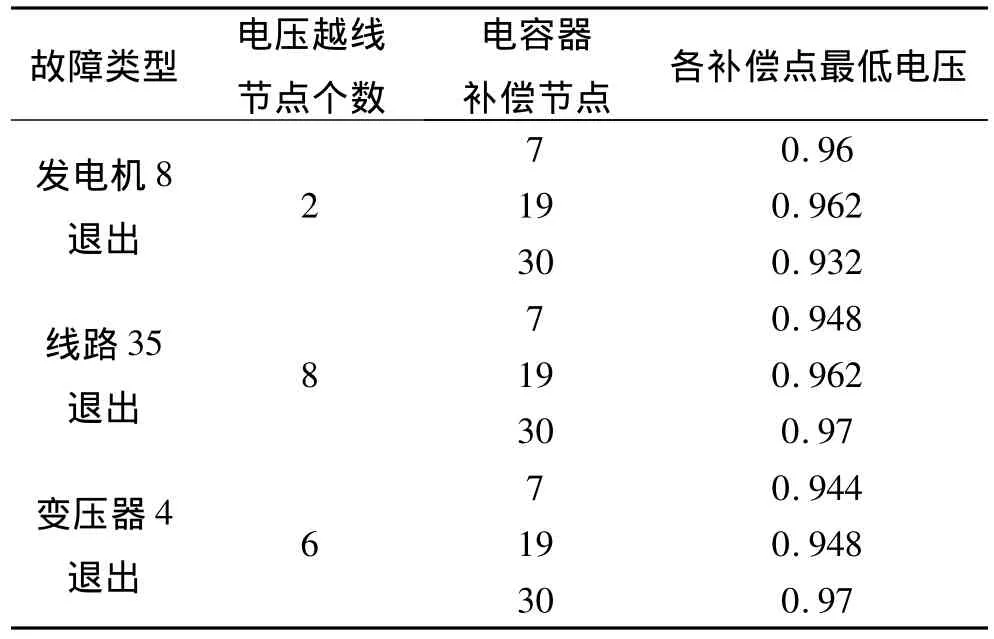
表5 突發故障下無功補償點電壓情況
表6為以變壓器4退出,由第1組電容器進行補償為例,得出的有突發故障時對各無功補償點進行補償的最優投入參數結果。
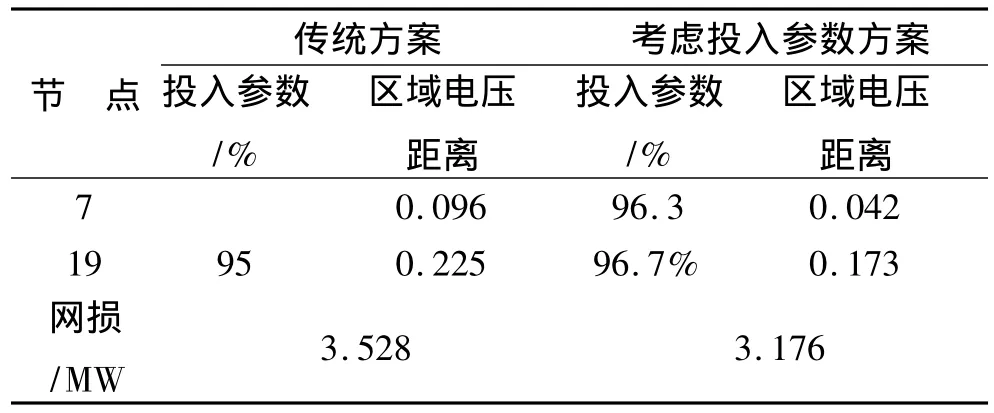
表6 無功補償投入系統方案3
其中,95%為設定的傳統無功補償投入參數,95.8%和96.7%分別為計算出的無功補償點7和19在變壓器4退出時的最優投入參數。區域電壓距離和網絡損耗則分別是在這些投入參數進行無功補償后,系統恢復到穩定時的值。
圖3為變壓器4退出的情況下,由第1組變壓器按照傳統方案與考慮投入參數方案進行無功補償后的各負荷節點電壓效果對比圖。
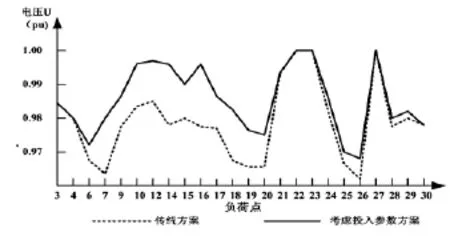
圖3 突發故障時兩方案電壓效果對比
3.3 與主導節點法相比較
主導節點的可控性要求主導節點必需是具有無功補償設備的點;而本文所采取的以無功補償點為中樞點,通過電氣距離的分區方式,說明了本文的無功補償節點能在一定程度上代表各區域的電壓水平,具有主導節點的客觀性。因此,仿真算例中,節點7、19、30分別為各區域的主導節點。
主導節點法對主導節點電壓進行調節控制,將各區域內主導節點電壓調節到一個合適的設定值上時,即可保證本區域內所有節點電壓均在允許范圍內。因此,運用主導節點法進行無功補償,其目標函數為各主導節點的電壓距離最小。
在負荷持續增加的情況下,由第1組變容器按照以主導節點電壓距離為指標與以區域電壓距離為指標進行無功補償后的最優投入參數結果如表7所示。
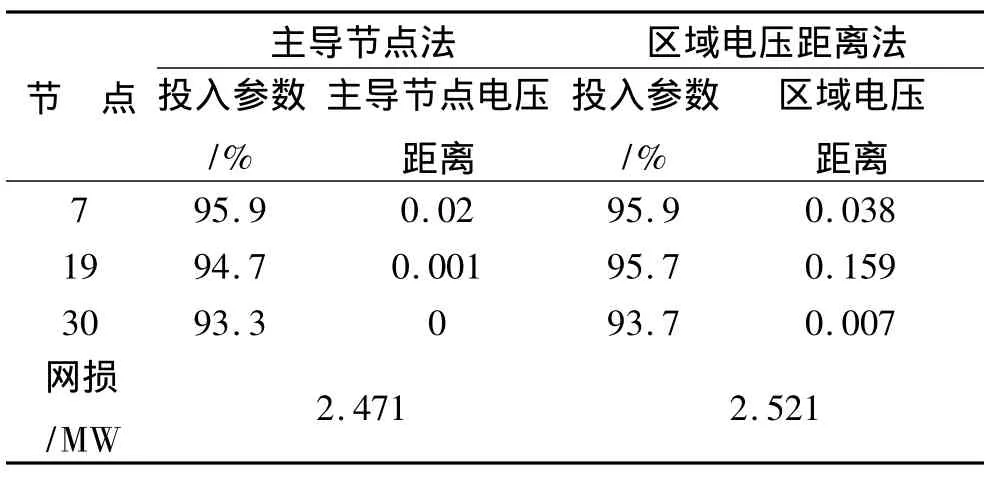
表7 無功補償投入系統方案4
圖4為負荷持續增加的情況下,由第1組變容器分別按照主導節點法與區域電壓距離法進行無功補償后的各負荷節點電壓效果對比圖
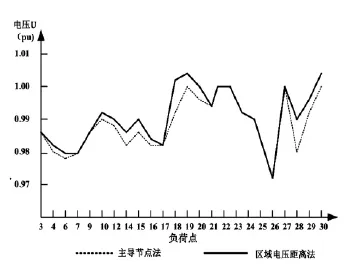
圖4 主導節點法與區域電壓距離法電壓效果對比
3.4 數據分析
在對仿真模型的最優補償計算中可以看出,無論是在負荷持續增長的情況下,還是在有突發故障的情況下,按照考慮投入參數的方案投入電容器,其節點電壓距離遠小于按照傳統方案進行無功補償,相應的網絡損耗也有所減小。
由圖1、圖2、圖3可以看出,在按照傳統方案進行無功補償,系統各節點電壓雖然能回到正常運行范圍之內,但電壓偏移較大;而按照考慮投入參數的方案進行無功補償,能使負荷點的電壓基本集中在0.98~1.01p.u.之間,縮小了電壓偏移范圍,預留了較多的電壓安全校正空間,有效地提高了電壓質量。
對比表3、表4的計算結果可以看出,對于同一補償節點,補償容量不同,最佳投入補償的參數也不同,最佳投入參數有可能高于95%,也有可能低于95%。
雖然由表7計算結果得知,由傳統的主導節點法計算得出的有功功率網損較小。但由圖4可以看出,由區域電壓距離計算得到的各節點電壓的偏移量更小,系統更加穩定。
結果表明,雖然各個節點各種情況下最優無功補償投入參數不相同,不能得到一個統一固定的值,但是可以看出,建立的節點的電壓評價指標能判斷無功補償在不同運行狀態下不同投入參數進行無功補償后系統的電壓穩定能力,所提出的方法能在保證電壓穩定的基礎上,減少網絡損耗。
4 結論
以上闡述了無功補償的基本原理,針對傳統的無功補償未考慮何種狀態下投入系統較優的問題,在電壓穩定的思想上建立了區域電壓距離指標,再運用粒子群算法得出確定無功補償投入參數的具體方案,方法比較簡單實用,直觀方便。雖然不能得出系統關于何種狀態下投入無功補償最佳的統一結論,但與傳統的僅憑運行人員經驗相比,用此方法計算能得到一個具體值,保證了系統運行的電壓穩定性,減少了網絡損耗,兼顧了安全性和經濟性,有一定的實際意義和應用價值。
[1]CARSON W.TAYLOR.電力系統電壓穩定[M].北京:中國電力出版社,2002.
[2]劉傳銓,張焰.電力系統無功補償點及其容量的確定[J].電網技術,2007,31(12):78 -81.
[3]盧勇,李盛林,盧志強.電力系統無功補償點的確定及其補償方法[J].電力電容器,2002(2):8-11.
[4]王建學,王錫凡,陳皓勇.基于協同進化法的電力系統無功優化[J].中國電機工程學報,2004,24(9):124-129.
[5]譚濤亮,張堯.基于遺傳禁忌混合算法的電力系 統無功優化[J].電網技術,2004,28(11):57 -61.
[6]王秀云,鄒磊,張迎新,等.基于改進免疫遺傳算法的電力系統無功優化[J].電力系統保護與控制,2010,38(1):1-5.
[7]丁曉群,黃偉,章文俊.基于電壓控制區的主導節點電壓校正方法[J].電網技術,2004,28(14):44 -48.
[8]龍啟峰,丁曉群,劉小波,等.基于可控主導節點的電壓分區及電壓校正研究[J].電網技術,2005,29(24):59 -62
[9]楊琪,李華強.基于電壓穩定的區域電網無功能力評價[J].電力系統保護與控制,
[10]張聰譽,陳民鈾,羅辭勇,等.基于多目標粒子群算法的電力系統無功優化[J].電力系統保護與控制,2010,20(4):164-169.
[12]李磊,黃彥全,董家讀,等.基于無功/電壓控制的電網優化分區方法[J].電力系統保護與控制,2005,14(6):95-99.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44