歷元間相位差分運(yùn)動學(xué)定軌精度影響分析*
2012-11-14 13:45:30范城城彭碧波陳潤靜
大地測量與地球動力學(xué) 2012年3期
范城城 彭碧波 陳潤靜 張 明
(1)中國科學(xué)院測量與地球物理研究所,武漢 430077 2)大地測量與地球動力學(xué)國家重點(diǎn)實(shí)驗(yàn)室,武漢 430077 3)中國科學(xué)院研究生院,北京 100049 4)武漢大學(xué)衛(wèi)星導(dǎo)航定位技術(shù)研究中心,武漢430079)
歷元間相位差分運(yùn)動學(xué)定軌精度影響分析*
范城城1,2,3)彭碧波1,2)陳潤靜1,2,3)張 明4)
(1)中國科學(xué)院測量與地球物理研究所,武漢 430077 2)大地測量與地球動力學(xué)國家重點(diǎn)實(shí)驗(yàn)室,武漢 430077 3)中國科學(xué)院研究生院,北京 100049 4)武漢大學(xué)衛(wèi)星導(dǎo)航定位技術(shù)研究中心,武漢430079)
運(yùn)用自編的GNSS_LEO_KPP低軌衛(wèi)星運(yùn)動學(xué)定軌軟件,分別解算了GRACE_A和GRACE_B衛(wèi)星DOY220/2011至DOY226/2011共7天的觀測數(shù)據(jù),通過與JPL事后精密軌道進(jìn)行比較,其最終運(yùn)動學(xué)軌道精度為10~20 cm。研究結(jié)果表明:初軌質(zhì)量對最終運(yùn)動學(xué)軌道質(zhì)量高低具有一定影響,可以采用迭代循環(huán)運(yùn)動學(xué)軌道作為先驗(yàn)軌道,當(dāng)?shù)h(huán)次數(shù)達(dá)到五次左右時(shí),最終的運(yùn)動學(xué)軌道精度可以保持在分米甚至亞厘米級。
GNSS;導(dǎo)航衛(wèi)星;運(yùn)動學(xué)定軌;低軌衛(wèi)星;初軌
1 引言
與動力學(xué)法相比,LEO運(yùn)動學(xué)定軌方法解算的運(yùn)動學(xué)軌道質(zhì)量主要取決于星載GNSS觀測數(shù)據(jù)質(zhì)量的好壞,且不受動力學(xué)模型誤差的影響,所以穩(wěn)健有效的數(shù)據(jù)質(zhì)量控制是取得高精度軌道的重要保證[1-6]。本文采用的數(shù)據(jù)質(zhì)量控制方法對先驗(yàn)軌道的質(zhì)量有很大依賴,研究先驗(yàn)軌道質(zhì)量對LEO運(yùn)動學(xué)定軌的影響具有一定的意義。
本文主要基于歷元間相位差分運(yùn)動學(xué)定軌原理進(jìn)行研究。瑞士AIUB(Astronomical Institute,University of Berne)的Bernese軟件和UNB(The University of New Brunswick)的DIPOP軟件都是采用該模型實(shí)現(xiàn)定軌定位,之前瑞士伯爾尼大學(xué)H.Bock博士、中國的陳俊平博士、鄭作亞博士、韓保民博士已經(jīng)對該種方法做了很多研究工作[7-12]。根據(jù)該原理編制了GNSS_LEO_KPP低軌衛(wèi)星運(yùn)動學(xué)定軌軟件,分別解算了GRACE_A和GRACE_B衛(wèi)星7天觀測數(shù)據(jù),采用不同精度先驗(yàn)軌道進(jìn)行運(yùn)動學(xué)定軌,最后進(jìn)一步對解算的結(jié)果做相關(guān)分析工作。
2 星載GNSS低軌衛(wèi)星運(yùn)動學(xué)定軌原理
圖1為星載GNSS低軌衛(wèi)星運(yùn)動學(xué)定軌軟件GNSS_LEO_KPP的數(shù)據(jù)處理流程圖。由圖1可以看出,該軟件主要包括四個(gè)處理模塊:
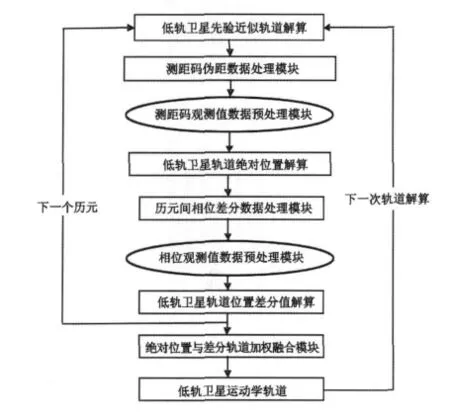
圖1 星載GNSS低軌衛(wèi)星運(yùn)動學(xué)定軌軟件GNSS_LEO_ KPP的數(shù)據(jù)處理流程圖Fig.1 Data processing flow chart of kinematic orbit determination ofLEO satellite-borne GNSS software named GNSS_LEO_KPP
1)雙頻測距碼無電離層延遲組合精密單點(diǎn)定位模塊。該模塊主要用來解算每個(gè)歷元時(shí)刻低軌衛(wèi)星的絕對位置(精度為米級甚至亞分米級)。
2)歷元間相位差分?jǐn)?shù)據(jù)處理模塊。該模塊主要解算歷元間低軌衛(wèi)星的軌道位置差分值(精度為厘米級甚至亞毫米級)。
3)絕對位置與差分軌道加權(quán)融合模塊。利用該模塊將解算的低軌衛(wèi)星絕對位置和差分位置加權(quán)融合得到最終的運(yùn)動學(xué)軌道,軌道精度可以達(dá)到分米級甚至亞厘米級。
4)觀測數(shù)據(jù)質(zhì)量控制模塊。該模塊是整個(gè)軟件的核心組成部分,觀測數(shù)據(jù)質(zhì)量的高低直接影響最終解算的運(yùn)動學(xué)軌道質(zhì)量。本文主要采用選舉多數(shù)法與中誤差控制法相結(jié)合的數(shù)據(jù)質(zhì)量控制方法。
選舉多數(shù)法的原理為:在同一個(gè)歷元,對于同一個(gè)接收機(jī)來說,假設(shè)已知精密衛(wèi)星星歷、精密衛(wèi)星鐘差以及低軌衛(wèi)星的先驗(yàn)軌道,則不同GPS衛(wèi)星觀測值中接收機(jī)鐘差應(yīng)該相同,且接收機(jī)鐘差改正精度應(yīng)在測距碼精度之內(nèi)。假設(shè)某個(gè)歷元觀測到ns顆衛(wèi)星,選舉多數(shù)法實(shí)施具體步驟如下:
1)在該歷元中每顆衛(wèi)星的接收機(jī)鐘差值γc與其他所有衛(wèi)星的接收機(jī)鐘差值γc,求差并計(jì)算差值絕對值的平均值:


3)計(jì)算其他各顆衛(wèi)星接收機(jī)鐘差與參考衛(wèi)星接收機(jī)鐘差之差,然后進(jìn)行粗差剔除判斷:
其中a類表示接受的觀測值,b類表示含有粗差的觀測值。
制約選舉多數(shù)法效果的主要因素是低軌衛(wèi)星的先驗(yàn)軌道質(zhì)量以及拒絕閾β取值的大小。歷元間相位差分觀測值周跳探測方法類似于測距碼觀測值粗差探測方法。本文用到的先驗(yàn)軌道包括四種方案類型,分別是:
第一種方案:初始迭代近似軌道,即直接采用未預(yù)處理的雙頻偽距近似解算的幾何軌道,精度為米級;
第二種方案:五次迭代循環(huán)運(yùn)動學(xué)軌道,即整個(gè)軟件系統(tǒng)循環(huán)解算五次后得到的最終運(yùn)動學(xué)軌道;
第三種方案:十次迭代循環(huán)運(yùn)動學(xué)軌道,即整個(gè)軟件系統(tǒng)循環(huán)解算十次后得到的最終運(yùn)動學(xué)軌道;
第四種方案:JPL事后精密軌道,軌道精度為厘米級。
3 先驗(yàn)軌道對運(yùn)動學(xué)定軌影響分析
采用GNSS_LEO_KPP軟件解算GRACE衛(wèi)星運(yùn)動學(xué)軌道,采用的數(shù)據(jù)為:1)GRACE_A和GRACE_ B衛(wèi)星觀測數(shù)據(jù)GPS1B(DOY220-226/2011,采樣率10秒);2)IGS提供的最終GNSS導(dǎo)航衛(wèi)星精密軌道(15分鐘SP3精密軌道);3)IGS提供的最終GNSS導(dǎo)航衛(wèi)星精密鐘差(30秒間隔精密鐘差文件);4)JPL提供的GRACE_A和GRACE_B衛(wèi)星事后精密軌道(60秒間隔GNV1B精密事后軌道)。
3.1 先驗(yàn)軌道對雙頻P碼偽距單點(diǎn)定位精度影響分析
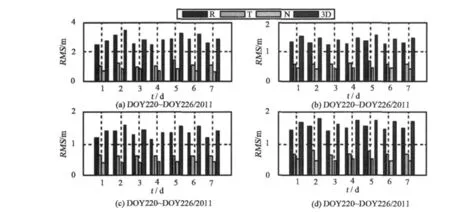
圖2 先驗(yàn)軌道對GRACE_A衛(wèi)星偽距軌道解算結(jié)果影響分析Fig.2 Impact analysis of priori orbits playing on the results of pseudorange orbits of GRACE_A satellite

圖3 先驗(yàn)軌道對GRACE_B衛(wèi)星偽距軌道解算結(jié)果影響分析Fig.3 Impact analysis of priori orbits playing on the results of pseudorange orbits of GRACE_B satellite
利用GNSS_LEO_KPP軟件的測距碼偽距數(shù)據(jù)處理模塊解算了GRACE低軌衛(wèi)星偽距軌道,將解算的偽距軌道與JPL事后精密軌道進(jìn)行對比分析,對比結(jié)果見圖2和圖3。圖2、3之(a)、(b)、(c)、(d)依次對應(yīng)第一、二、三、四方案。
圖2與圖3表明:隨著迭代循環(huán)次數(shù)的增加,GRACE_A衛(wèi)星的偽距軌道精度3D_RMS由原來3~4米提高到1.5米,軌道徑向R精度也由原來3~4米提高到1.5米,GRACE_B衛(wèi)星偽距軌道精度3D_RMS由原來1.5米提高到亞分米級,特別是軌道徑向R精度也相應(yīng)提高到亞分米量級,且A與B衛(wèi)星在切向T與法向N精度都相應(yīng)得到改善。GRACE_B衛(wèi)星的解算結(jié)果明顯優(yōu)于A衛(wèi)星,主要原因可能是GRACE_B衛(wèi)星觀測數(shù)據(jù)質(zhì)量與觀測幾何條件優(yōu)于A衛(wèi)星。五次迭代循環(huán)軌道作為先驗(yàn)軌道解算的結(jié)果接近十次迭代循環(huán)的結(jié)果,與事后精密軌道作為先驗(yàn)軌道解算的精度相當(dāng)。主要原因包括:1)測距碼偽距本身的測距精度為米級,解算的偽距軌道精度受到本身觀測手段制約;2)隨著先驗(yàn)軌道精度的逐漸提高,偽距觀測值更多粗差被探測和提出,相應(yīng)偽距軌道精度得到提高。綜上所述,先驗(yàn)軌道的精度對偽距軌道精度影響比較大,特別是在軌道R方向,故可以采用迭代循環(huán)得到的運(yùn)動學(xué)軌道作為先驗(yàn)軌道,迭代循環(huán)次數(shù)達(dá)到五次左右,偽距軌道精度保持平穩(wěn),可以穩(wěn)定在1米左右,滿足本軟件的初始設(shè)計(jì)要求,為GNSS_LEO_KPP軟件提供相對較好的絕對位置基準(zhǔn)。
3.2 先驗(yàn)軌道對歷元間相位差分軌道精度影響分析
利用GNSS_LEO_KPP軟件的歷元間相位差分?jǐn)?shù)據(jù)處理模塊解算了GRACE低軌衛(wèi)星相位偽距差分軌道,將解算的相位偽距差分軌道與JPL事后精密差分軌道進(jìn)行對比分析。圖4與圖5類型同于圖2與圖3。
圖4與圖5表明:無論是GRACE_A衛(wèi)星還是B衛(wèi)星,隨著迭代循環(huán)次數(shù)的增加,解算的歷元間差分軌道的精度3D_RMS最終都穩(wěn)定保持在厘米級甚至亞毫米級,差分軌道徑向R精度達(dá)到1~2厘米,切向T與法向N精度變化很小,基本保持1厘米左右。迭代循環(huán)五次得到的結(jié)果與十次迭代結(jié)果以及事后精密軌道作為先驗(yàn)軌道解算的結(jié)果精度相當(dāng)。圖中還可以看出,先驗(yàn)軌道的精度對于相位偽距差分軌道精度影響不是很大,主要原因是歷元間相位偽距差分觀測數(shù)據(jù)精度高,且周跳僅對發(fā)生周跳的某歷元相位差分軌道精度產(chǎn)生影響,不會對其他歷元的差分軌道精度產(chǎn)生影響,故最終的相位偽距差分軌道精度可以穩(wěn)定保持在厘米級甚至亞毫米級,滿足本軟件歷元間相位差分?jǐn)?shù)據(jù)處理模塊設(shè)計(jì)的期望,為GNSS_LEO_KPP軟件提供了相當(dāng)高精度的差分位置虛擬觀測值。

圖4 先驗(yàn)軌道對GRACE_A衛(wèi)星相位偽距差分軌道解算結(jié)果影響分析Fig.4 Iimpact analysis of priori orbits playing on the results of differential phase pseudorange orbits of GRACE_A satellite
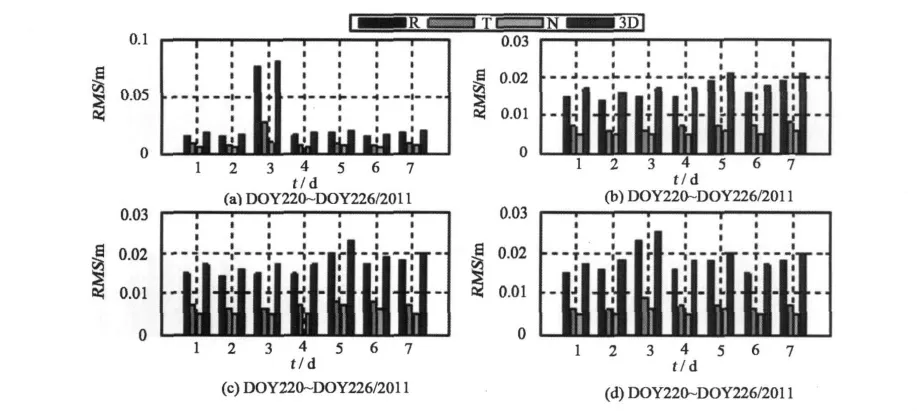
圖5 先驗(yàn)軌道對GRACE_B衛(wèi)星相位偽距差分軌道解算結(jié)果影響分析Fig.5 Impact analysis of priori orbits playing on the results of differential phase pseudorange orbits of GRACE_B satellite
3.3 先驗(yàn)軌道對最終運(yùn)動學(xué)軌道精度影響分析

圖6 先驗(yàn)軌道對GRACE_A衛(wèi)星運(yùn)動學(xué)軌道解算結(jié)果影響分析Fig.6 Impact analysis of priori orbits playing on the results of the kinematic orbits of GRACE_A satellite
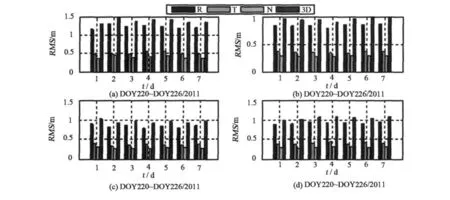
圖7 先驗(yàn)軌道對GRACE_B衛(wèi)星運(yùn)動學(xué)軌道解算結(jié)果影響分析Fig.7 Impact analysis of priori orbits playing on the results of the kinematic orbits of GRACE_B satellite
利用GNSS_LEO_KPP軟件的絕對位置與差分軌道加權(quán)融合模塊解算了GRACE低軌衛(wèi)星運(yùn)動學(xué)軌道,將解算的運(yùn)動學(xué)軌道與JPL事后精密軌道進(jìn)行對比分析。圖6與圖7類型同于圖2與圖3。
圖6和圖7表明:隨著迭代循環(huán)次數(shù)的增加,相比于JPL事后精密軌道,GRACE_A與B衛(wèi)星采用五次迭代循環(huán)運(yùn)動學(xué)軌道和十次迭代循環(huán)運(yùn)動學(xué)軌道作為先驗(yàn)軌道解算的最終運(yùn)動學(xué)軌道精度3D_ RMS可以達(dá)到10~20 cm,軌道徑向R精度達(dá)到10~20 cm,且切向T與法向N精度都得到很大改善,與事后精密軌道作為先驗(yàn)軌道精度相當(dāng),達(dá)到GNSS _LEO_KPP軟件設(shè)計(jì)的軌道解算的分米級精度期望。圖6(c)相比圖6(b),最終運(yùn)動學(xué)軌道精度略有降低,主要原因是過多的迭代循環(huán)導(dǎo)致歷元間差分軌道變得更加不連續(xù),斷裂點(diǎn)處的位置精度取決于偽距軌道精度,故導(dǎo)致整體的運(yùn)動學(xué)軌道精度降低,相應(yīng)地也對下一次偽距軌道解算和差分軌道解算精度產(chǎn)生影響,分別對比圖2(c)和(b)以及圖4 (c)和(b)可以得到結(jié)論。先驗(yàn)軌道的精度對于GNSS_LEO_KPP軟件解算的最終運(yùn)動學(xué)軌道精度影響比較大,主要原因包括:1)當(dāng)采用的先驗(yàn)軌道質(zhì)量不是很好時(shí),偽距軌道解算精度不高,故無法提供較好的絕對基準(zhǔn);2)當(dāng)歷元間公共觀測衛(wèi)星數(shù)量經(jīng)數(shù)據(jù)預(yù)處理后不足于解算歷元間差分軌道,導(dǎo)致歷元間差分軌道斷裂,斷裂點(diǎn)處的運(yùn)動學(xué)軌道精度取決與偽距軌道精度,故解算的運(yùn)動學(xué)軌道精度不高。綜上所述,應(yīng)當(dāng)合理地加強(qiáng)偽距觀測值質(zhì)量控制以提高偽距軌道精度,同時(shí)適當(dāng)對載波相位差分觀測值質(zhì)量控制保持寬松,以保證差分軌道歷元間的連續(xù)性。
4 結(jié)論
1)GNSS_LEO_KPP低軌衛(wèi)星運(yùn)動學(xué)定軌軟件解算的運(yùn)動學(xué)軌道精度為分米級甚至亞厘米級。該方法主要原理是將偽距單點(diǎn)位置基準(zhǔn)和歷元間相位差分位置進(jìn)行融合,偽距軌道精度對最終運(yùn)動學(xué)軌道精度具有決定性影響,歷元間差分軌道的不連續(xù)性也會對最終運(yùn)動學(xué)軌道精度產(chǎn)生一定影響。由于偽距單點(diǎn)的位置精度不是很高,無法提供高精度的位置基準(zhǔn),所以最后融合的結(jié)果只能保持在分米甚至亞厘米級。
2)為確保最后解算的運(yùn)動學(xué)軌道質(zhì)量,在無法獲得較好質(zhì)量的動力學(xué)平滑軌道時(shí),可以采用迭代循環(huán)得到的運(yùn)動學(xué)軌道作為初軌不斷的循環(huán)解算,且迭代循環(huán)次數(shù)不宜過多,當(dāng)?shù)h(huán)次數(shù)達(dá)到五次左右時(shí),解算的最終運(yùn)動學(xué)軌道精度可以穩(wěn)定在分米級甚至亞厘米級水平。
3)為獲得更加高精度的運(yùn)動學(xué)軌道,可以進(jìn)一步完善觀測數(shù)據(jù)質(zhì)量控制,整周模糊度的解算與固定進(jìn)行載波相位精密單點(diǎn)定位,或者與動力學(xué)法相結(jié)合進(jìn)行解算。
1 Oliver Montenbruck and Eberhard Gill.Satellite orbits-models,methods,and applications[M].Germany:Springer, 2000.
2 Heike Bock.Efficient methods for determining precise orbit of low Earth orbiters using the global positioning system[D].Schwizerland:Astronomical Institute University of Berne,2003.
3 Bock H,et al.Efficient precise orbit determination of LEO satellites using GPS[J].Advances in Space Research,2002,30(2):295-300.
4 J?ggi A,et al.Precise orbit determination for GRACE using undifferenced of doubly differenced GPS data[J].Advances in Space Research,2007,(39):1 612-1 619.
5 Van den Ijssel J,Visser P and Pati?o Rodriguez E.CHAMP precise orbit determination using GPS data[J].Advances in Space Research,2003,31(8):1 889-1 895.
6 Li Jiancheng,el al.Precise orbit determination for GRACE with zero-difference kinematic method[J].Chinese Science Bulletin,2010,55(7):600-606.
7 陳俊平,王解先.基于歷元間差分的低軌衛(wèi)星運(yùn)動學(xué)精密定軌[J].大地測量與地球動力學(xué),2007,(4):57-61.(Chen Junping and Wang Jiexian.Kinematic precise orbit determination of low Earth orbiter based on epoch-difference strategy[J].Journal of Geodesy and Geodynamics,2007,(4):57-61)
8 趙齊樂,等.CHAMP衛(wèi)星cm級精密定軌[J].武漢大學(xué)學(xué)報(bào)(信息科學(xué)版),2006,31(10):879-882.(Zhao Qile,et al.Precise orbit determination of CHAMP satellite with cm -level accuracy[J].Geomatics and Information Science of Wuhan University,2006,31(10):879-882)
9 孔巧麗,歐吉坤,柴艷菊.星載GPS相位非差觀測粗差和周跳的探測與修復(fù)[J].大地測量與地球動力學(xué),2005,(4):105-109.(Kong Qiaoli,Ou Jikun and Cai Yanju.Detection and repair of gross errors and cycle slips in LEO-based GPS data on zero level[J].Journal of Geodesy and Geodynamics,2005,(4):105-109)
10 陳俊平.低軌衛(wèi)星精密定軌研究[D].同濟(jì)大學(xué),2007.(Chen Junping.On precise orbit determination of low earth orbiters[D].Tongji University,2007)
11 李濟(jì)生.人造衛(wèi)星精密軌道確定[M].北京:解放軍出版社,1995.(Li Jisheng.Satellite precise orbit determination[M].Beijing:Liberation Army Publishing House,1995)
12 盛傳貞.星載GPS-LEO衛(wèi)星與GPS導(dǎo)航衛(wèi)星星座定軌理論與方法研究[D].中國科學(xué)院研究生院,2010.(Sheng Chuangzhen.Studies on the theory and method for precise orbit determination of LEO satellite and GPS navigation constellation[D].Graduate School of Chinese Academy of Sciences,2010)
ACCURACY IMPACT ANALYSIS OF KINEMATIC ORBIT DETERMINATION BASED ON EPOCH PHASE DIFFERENCE
Fan Chengcheng1,2,3),Peng Bibo1,2),Chen Runjing1,2,3)and Zhang Ming4)
(1)Institute of Geodesy and Geophysics,CAS,Wuhan 430077 2)State key Laboratory of Geodesy and Earth’s Dynamic,Wuhan 430077 3)Graduate University of Chinese Academy of Sciences,Beijing 100049 4)GNSS Reseach Center,Wuhan University,Wuhan430079)
The kinematic orbit determination of LEO satellite software named GNSS_LEO_KPP is developed,and the observation data of GRACE_A and GRACE_B satellites in 7 days from DOY220/2011 to DOY226/2011 are calculated.Compared with the JPL precise orbits,the accuracy of final kinematic orbit can reach 10—20 cm.The results show that:the priori orbit quality has a certain level of impact on the final kinematic orbit quality,so we could use the iterative loop kinematic orbit as a prior orbit,and the final kinematic orbit accuracy can be maintained in decimeter or sub-centimeter level.
GNSS;navigation constellation;kinematic orbit determination;LEO;priori orbit
1671-5942(2012)03-0080-06
2012-02-13
國家自然科學(xué)基金(41131067,40774012)
范城城,男,1986年生,碩士生,主要研究方向?yàn)樾禽dGPS低軌衛(wèi)星精密定規(guī).E-mail:ccfan@whu.edu.cn
P227
A