直驅永磁型風電系統的小擾動穩定性分析
2012-11-09 10:38:18李軍軍吳政球譚勛瓊
電力系統及其自動化學報 2012年5期
李軍軍, 吳政球, 譚勛瓊
(1.湖南大學電氣與信息工程學院, 長沙 410082;2.湖南工業大學電氣與信息工程學院, 株洲 412008)
直驅永磁型風電系統的小擾動穩定性分析
李軍軍1,2, 吳政球1, 譚勛瓊1
(1.湖南大學電氣與信息工程學院, 長沙 410082;2.湖南工業大學電氣與信息工程學院, 株洲 412008)
建立了基于雙PWM變換器的直驅永磁型風電系統的小擾動穩定性分析數學模型,研究了風電系統并網后參數變化對電力系統穩定性的影響,得到了一些有意義的結論;為保證風電系統最大功率輸出,風力機采用了最大功率點跟蹤控制策略;研究了機側和網側變換器控制結構;利用Matlab建模仿真,對系統在不同參數條件下進行了時域分析。仿真結果表明,不同的參數條件下,系統具有較好的小擾動穩定性,驗證了理論分析的正確性,為直驅永磁型風電系統安全穩定地并網運行提供了可借鑒的理論依據。
永磁同步機; PWM變換器; 小擾動穩定; 最大功率點跟蹤
變速恒頻發電是目前國內外風電技術的主流,機組通常采用雙饋型發電機,系統通過齒輪箱連接風力機和發電機,雙饋電機帶有電刷和滑環,系統結構較復雜,降低了運行的可靠性[1]。直驅永磁型風電系統省去了電刷、滑環和齒輪箱,減少了系統的維護及成本,可靠性高。雙脈沖寬度調制PWM(pulse width modulation)變換器的直驅永磁型風電系統不但能實現變速恒頻運行,并網有功和無功還能夠獨立控制,具有發電效率高,結構簡單,運行穩定等特點,得到了廣泛的應用。隨著風電規模的不斷擴大,風電并網運行的穩定性問題日益突出,已成為研究的重要課題之一,建立風力發電系統數學模型進行小擾動穩定性分析,并進行仿真是重要的研究手段之一。文獻[2]對雙PWM變換器的直驅永磁型風電系統的動態、靜態特性進行了建模仿真研究;文獻[4]研究了在最佳風能追蹤控制下,直驅永磁型風電系統機側和網側變換器的控制策略;文獻[5~8]研究了電壓型PWM變換器的數學模型及其控制策略;文獻[9]研究了電流型雙PWM變換器的直驅永磁型風電系統的小信號模型,分析了系統參數變化對系統穩定性的影響。
本文在對上述文獻研究的基礎上,建立了雙PWM變換器的直驅永磁型風電系統的小信號穩定性分析數學模型;研究了最大功率點跟蹤控制策略,使風電系統輸出功率最大;設計了雙PWM變換器的控制方案,并在此基礎上分析了參數變化對系統小擾動穩定性的影響;通過建模對系統在不同參數條件下進行了時域仿真,對理論分析進行驗證。
1 雙PWM變換器的直驅永磁型風電系統模型
系統結構如圖1所示。由風輪機、永磁同步電機、雙PWM變換器、網側阻抗及電網組成。
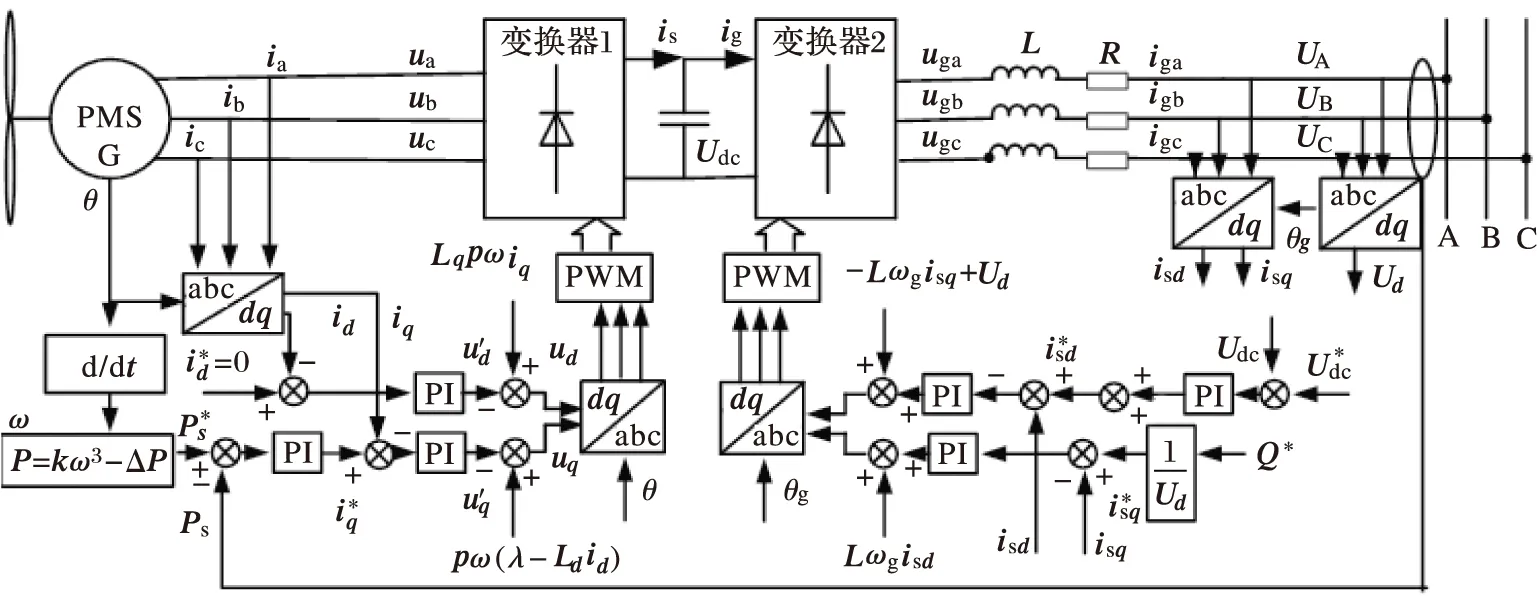
圖1 直驅型永磁風電系統
1.1 風輪機
風輪機產生的機械功率為
(1)
其中:ρ為空氣密度;r為葉片半徑;vm為風速;λ為葉尖速率比;Cp為風輪機轉換效率,是λ和槳距角β的非線性函數。
1.2永磁同步電機PMSG模型
dq坐標系下,PMSG的電氣部分方程
(2)
機械部分方程
dω/dt=1/J(Tm-Te-Fω)
(3)
PMSG電磁轉矩
Te=1.5p[γiq+(Ld-Lq)idiq]
(4)
式中:Rs為定子電阻;γ為磁鏈;ω為轉子機械角轉速;Ld、Lq為定子dq軸電感;ud、uq(id、iq)為定子dq軸電壓(電流);F為轉子阻尼系數;J為轉子轉動慣量;Tm為風輪機輸出機械轉矩;p為極對數。
1.3 網側模型
如圖1所示,電網電壓綜合矢量定位d軸,網側dq坐標系下方程
(5)
式中:ugd、ugq、isd、isq為變換器2輸出的電壓和電流;Ud為電網電壓;ωg為電網角頻率;R、L網側電阻和電感。
1.4 雙PWM變換器數學模型
變換器2輸出電壓與直流電壓關系為
(6)
Sk開關函數,三相橋臂上管導通、下管關斷時為1;上管關斷,下管導通時為0。dq變換后,得
(7)
式中,Sd2、Sq2為dq坐標系下的開關函數。直流電流ig與網側交流電流關系
ig=Sa2isa+Sb2isb+Sc2isc
(8)
dq變換后,得
ig=1.5(Sd2isd+Sq2isq)
(9)
同理,變換器1輸入端電壓、電流與直流電壓、電流也滿足類似的關系。
直流電容器的電壓,電流滿足
CdUdc/dt=is-ig
(10)
式中:is、ig為變換器1、2的輸出、輸入電流。
1.5 小信號交流模型
結合式(2)、式(3)、式(5)和式(8)~式(10)構成了系統的狀態方程,經整理后(考慮隱式PMSG,Ld=Lq),得
(11)
式中:isd、isq、Udc、id、iq、ω為狀態變量;Ud、Uq為輸入量;而中間變量ugd、ugq、ud、uq需從方程中消去。由于開關函數Sd1、Sq1和Sd2、Sq2是時間的非連續函數,不利于控制系統分析和設計。對開關函數Sk進行傅里葉分解[5]可得
(12)
Sk既含有直流分量,又含高頻分量,忽略開關函數中相關的高次諧波,sa、sb、sc可用占空比da、db、dc代替。
根據文獻[11]的描述方法,可得系統的小信號交流模型為
(13)

模型(13)在小擾動穩定性分析時很方便。其矩陣形式表示為
(14)
若A所有特征值均有負實部,系統在小擾動下系統是穩定的。
2 最佳功率追蹤控制
當槳距角一定時,風力機葉尖速比保持最佳,就可獲得最大風能利用系數Cpmax,實現最大風能捕獲。因此,最大風能跟蹤的要求是在風速變化時適時調整風力機轉速,使其始終維持最佳葉尖速比λopt[12]。最佳功率Pm-opt只與風輪轉速有關,即
Pm-opt=kω3
(15)

在網側,若忽略變換器自身及線路損耗,根據功率不變原則有
Pg=ugaisa+ugbisb+ugcisc≈
Uaisa+Ubisb+Ucisc
(16)
網側有功、無功可表示為
(17)
經坐標變換實現了有功和無功的解耦。
忽略變換器自身損耗,僅考慮PMSG定子銅耗,有
(18)
機側功率存在以下關系
Pm=Pe+ΔP
(19)
式中,Pe為PMSG電磁功率
當機側、網側功率滿足以下關系時系統達到穩態,即
PM-ΔP=Pg
(20)
3 雙PWM變換器的控制策略
網側和機側變換器的控制結構如圖1所示。機側變換器采用雙環控制結構:功率外環和電流內環。外環的主要作用提供電流內環參考值;電流內環按功率外環的輸出指令進行電流控制。從式(4)可知PMSG定子dq軸電流id、iq間存在耦合,可引入前饋信號,實現解耦。同時id=0,電磁轉矩由q軸電流決定,相當于直流電機的控制,最簡單也最實用。
網側變換器也采用雙環控制結構,即直流電壓外環與電流內環。外環的主要作用是保持直流電壓的穩定,并給電流內環提供參考信號。從式(5)可知,網側電流dq軸分量isd、isq也存在耦合,同樣可以像機側那樣引入前饋信號。isd相當于有功電流,isq相當于無功電流,若要網側變換器工作于單位功率因數狀態,可使isq=0。
4 特征值分析
求解A的特征值,分析參數變化對系統穩定性的影響。當機側和網側功率滿足式(20)時,則可認為系統處于穩態,計算得直流工作點值(均為實名制,系統有關參數見附錄):ud=195.1 V,uq=552.3 V,Iq=1 191.6 A,Id=0,Ud=311.12 V,Uq=0,Isq=0,Isd=2 115.4 A,Udc=1 200 V,Dd1=0.162 6,Dq1=0.460 3,Dd2=0.259 3,Dq2=0.166 1,ω=2.28 rad/s,風速vm=11 m/s。
PWM調制中,設調制波為mi=Mcos(ωt+δ),δ在機側為PMSG感應電動勢ei與電樞電壓(即機側變換器輸入電壓)ui的夾角(i=a,b,c),在網側δ為ugi與Ui的夾角。調制深度M,當0≤M≤1時調制效果最好,占空比與調制波有R關系為
di=(mi+1)/2
(21)
另外三相電壓型變換器輸入端電壓與調制電壓、直流電壓間的關系為
(22)
在機側,經dq變化可得
(23)
代入有關參數,計算得σ1=70.545 1°,M1=0.976 2。同理,可得σ2=32.639 5°,M2=0.615 8,由此確定了機側和網側的調制信號。
4.1 改變線路電感值
表1數據表明,改變線路電感對機側無影響,對網側影響較大,雖然增大電感可改善濾波效果,但網側變換器調制深度M2gt;1,調制效果變差。連接風力機與電網的線路阻抗大小表示風力機與系統聯系的緊密程度,阻抗小,可提高功率輸送能力,有利于系統的穩定性。表2數據表明,增大線路電感,特征值右移,穩定性變差,與實際情況相吻合。

表1 改變線路電感時參數的變化

表2 改變線路電感時特征值的變化
4.2 改變母線電壓值
表3和表4顯示,母線電壓增大,參數變化較小,系統的小擾動穩定性有所提高,在實際情況中,適當提高電壓,有利于提高系統的功率輸送能力,對系統的穩定性是有利的。
4.3 改變直流電容值
表5數據表明,增加電容值對機側、網側無影響;表6顯示,特征值實部絕對值有所增大,系統的穩定性增強,因此合適的直流電容對系統的穩定性是有利的。在風電系統中,為避免直流電壓波動,常引入大電容,而大電容的引入必然會帶來成本的提高,重量、體積的增大,這在兆瓦級風電系統中尤為明顯;同時大電容的引入加大了電壓環的時間常數,減慢了電壓環的響應速度,從上述原因考慮,直流電容的值不宜過大。

表3 母線電壓改變時參數的變化

表4 母線電壓改變時特征值的變化

表5 改變直流電容時參數的變化

表6 改變直流電容時特征值的變化
4.4 改變風速
表7和表8表明,額定風速以上改變風速,對系統的穩定性不利。由于采用最佳風能追蹤控制,當風速增大,PMSG轉速、輸出功率均增大,網側電壓、電流也有較大增加;同時風速增大,機側和網側變換器調制深度大于1,影響調制效果,為保證系統安全運行應增加漿距角控制將多余的風能除去,但由此降低了發電效率。

表7 改變風速時相關量的變化

表8 改變風速時特征值的變化
5 仿真
本節通過建模仿真對理論分析結果加以驗證。要求:機側id=0,電磁轉矩及電磁功率取決于iq;直流電壓調制到1 200 V,且保持恒定;網側isq=0,有功等于機側輸出有功,無功為零,改變參數時系統能否保持小擾動穩定。仿真參數按附錄設置,仿真時間5 s,仿真波形如圖2~圖11所示。圖2所示,PMSG轉速與穩態時計算的基本一致;機側電流id=0,如圖3所示;機側變換器的調制深度與調制角度與計算的值比較接近,如圖4~圖5所示,而網側變換器的有一定差異,如圖8~圖9所示;網側變換器向電網輸送有功達1 MW,無功為0,如圖10所示;直流電壓達到1 200 V,恒定不變,如圖11所示;網側電流諧波THD=4.33%lt;5%,滿足要求。
篇幅所限,僅給出改變線路電感和改變風速時的仿真結果。線路電感從0.3 mH增大至0.8 mH,其余參數保持不變。仿真波形如圖12~圖15所示,從仿真結果來看,直流電壓、網側變換器輸出有功、電流均有小幅波動,且電感值越大波動越大。因此,電感值過大不利于系統的小擾動穩定性,與理論分析是一致的。
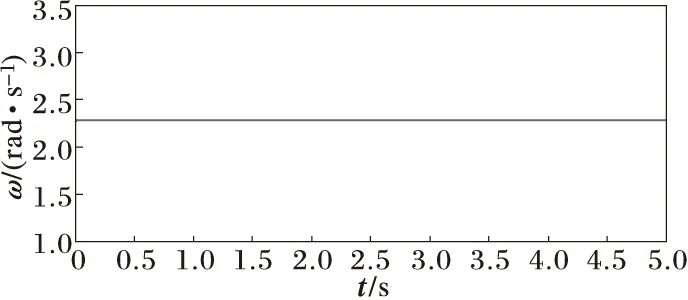
圖2 PMSG轉速
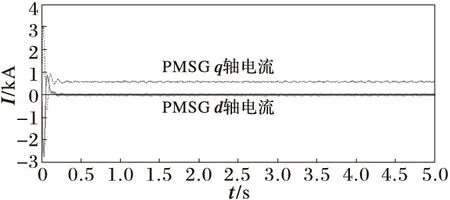
圖3 PMSG dq 軸電流
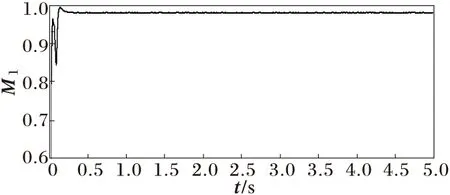
圖4 PMSG側變換器調制深度M1
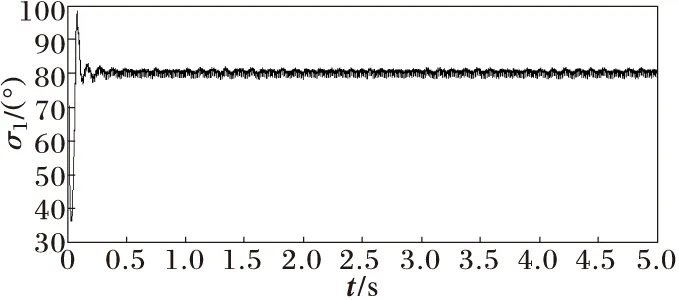
圖5 PMSG側變換器調制角σ1
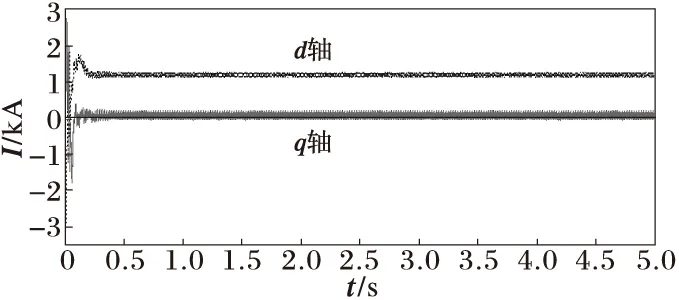
圖6 網側dq軸電流
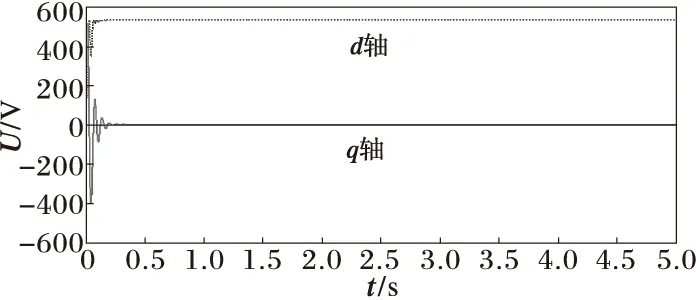
圖7 網側dq軸電壓
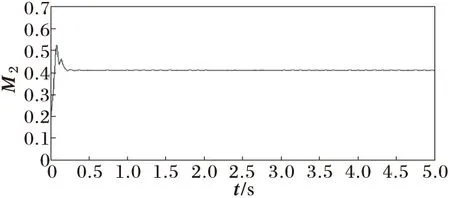
圖8 網側變換器調制深度M2
考慮改變風速(見圖16)時(其他參數不變)對系統穩定性的影響。仿真波形如圖17~圖21所示,從仿真結果來看,風速增加使得輸出功率、直流電壓、網側電流有所增加,并且機側調制深度M1gt;1,與理論分析一致,若不通過漿距角調節,過大的風速對系統的小擾動穩定是不利的。
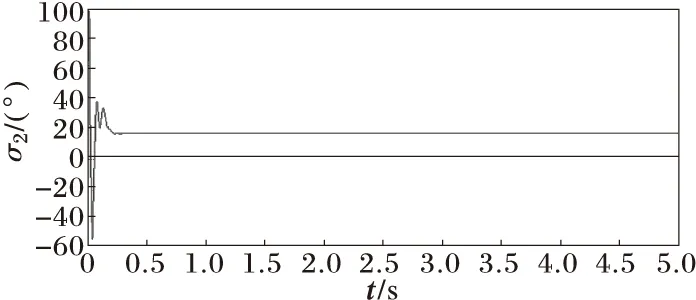
圖9 網側變換器調制角σ2
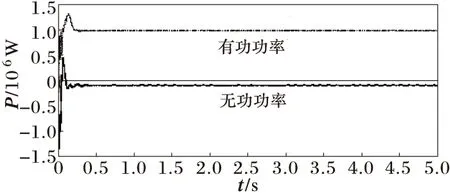
圖10 網側變換器向電網輸送的功率
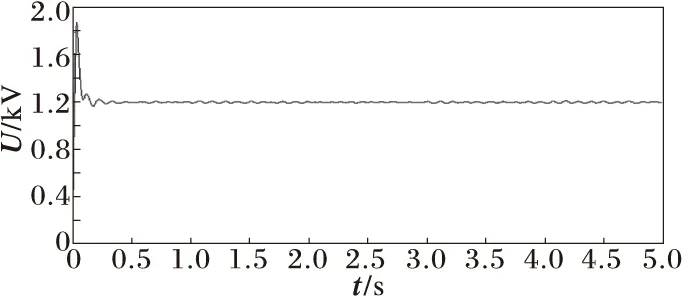
圖11 直流電壓
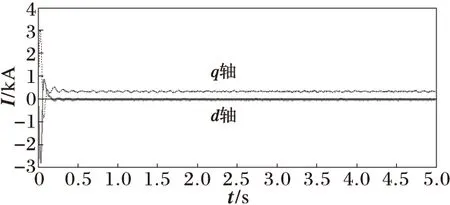
圖12 改變線路電感時PMSG dq 軸電流
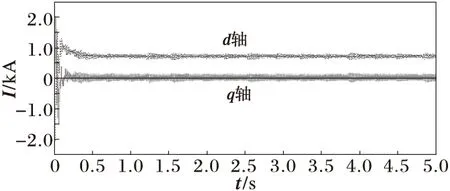
圖13 改變線路電感時網側dq軸電流
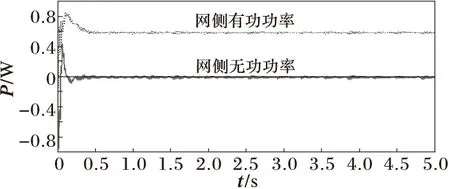
圖14 改變線路電感時網側變換器向電網輸送的功率
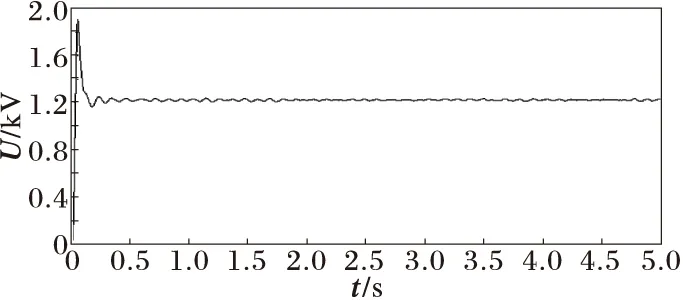
圖15 改變線路電感時直流電壓
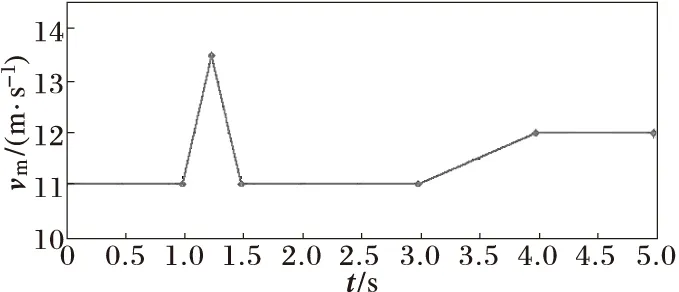
圖16 風速變化情況
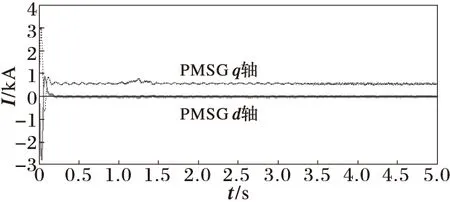
圖17 改變風速時PMSG dq 軸電流
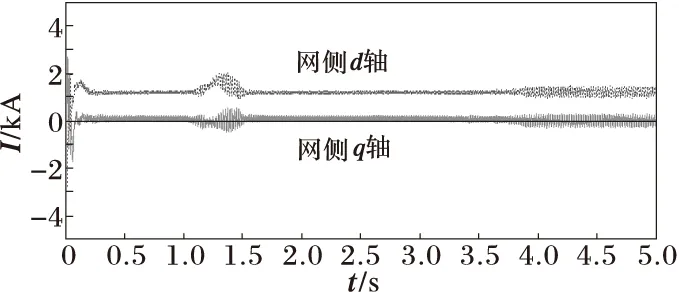
圖18 改變風速時網側dq軸電流
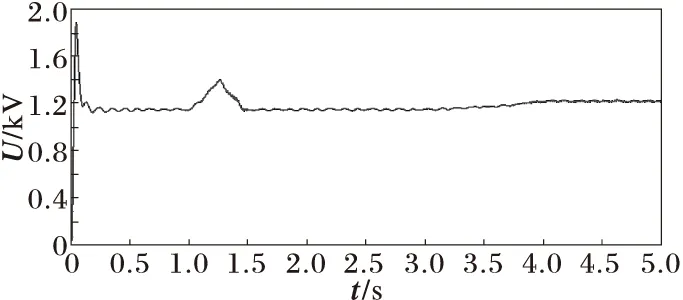
圖19 改變風速時直流電壓
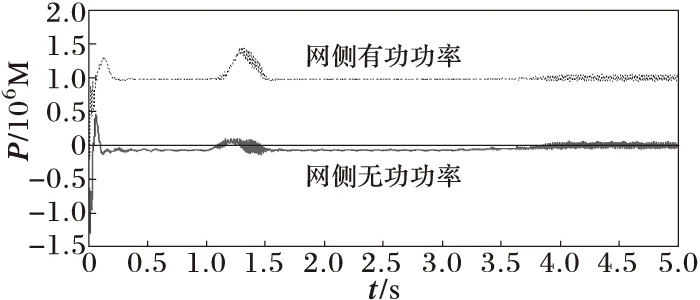
圖20 網側變換器向電網輸送的功率
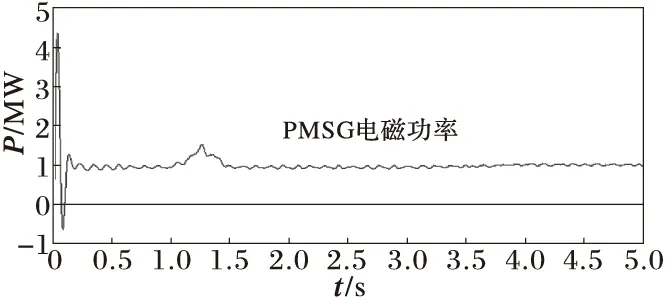
圖21 PMSG輸出電磁功率
6 結語
通過研究發現,不同的參數運行條件對系統的小擾動穩定性有一定的影響,仿真試驗也驗證了理論分析的正確性。若要保證系統具有較好的小擾動穩定性,線路電感不宜過大;直流電容要取值合適;母線電壓可適當提高;增加漿距角調節機構,以保證系統在額定風速以上能安全地運行,為直驅永磁型風電并網安全穩定運行提供了可借鑒的理論依據。
附錄A
PMSG:
額定容量1 MW;定子額定電壓690 V,定子額定電流850 A,p=28,Rs=0.006 Ω,額定轉速2.3 rad/s,Ld=Lq=2.56 mH,λ=8.748,J=5 000 kg·m2,F=0;Udc=1 200 V,C=38 mF。
線路:
L=300 μH;R=3.5 mΩ。
電網頻率50 Hz。
電網電壓380 V。
風輪機:ρ=1.225 kg/m3,β=0°,r=30 m,λopt=6.25,Cpmax=0.438 2。
PI調節器:kp1=0.5,Ti=0.05,kp2=0.1;開關頻率為6 kHz,kpwm=1 200。
[1] 胡書舉,李建林,許洪華(Hu Shuju, Li Jianlin, Xu Honghua).永磁直驅風電系統變流器拓撲分析(Analysis of converter configuration for direct-drive wind power system with PMSG)[J].電力自動化設備(Electric Power Automation Equipment), 2008, 28(4):77-81.
[2] 胡書舉,趙棟利,李建林,等(Hu Shuju,Zhao Dongli, Li Jianlin,etal).基于永磁同步發電機的直驅風電雙脈寬調制變流器的研制(Development on dual-PWM converter for direct-driven wind power system based on PMSG)[J].動力工程(Journal of Power Engineering),2009,29(2):195-200.
[3] 謝震,張興,曹仁賢(Xie Zhen,Zhang Xing, Cao Renxian). 雙饋風力發電用交直交變流器控制策略的研究(Study on the control strategy of AC-DC-AC converter used in wind turbine system driven by doubly fed induction generator)[J].太陽能學報(Acta Energlae Solaris Sinica),2007,28(8):825-829.
[4] 姚駿,廖勇,瞿興鴻(Yao Jun, Liao Yong, Qu Xinghong).直驅永磁同步風力發電機的最佳風能跟蹤控制(Optimal wind energy tracking control of direct-driven permanent magnet synchronous generators for wind turbines)[J].電網技術(Power System Technology),2008,32(10):11-15,27.
[5] 李建林,王立喬,熊宇,等(Li Jianlin,Wang Liqiao, Xiong Yu,etal).三相電壓型變流器系統靜態數學模型(A static-state mathematical model of three-phase voltage source converter)[J].電工技術學報(Transactions of China Electrotechnical Society),2004,19(7):11-15.
[6] 裘迅,方宇,王儒,等(Qiu Xun,Fang Yu,Wang Ru,etal). 三相高功率因素電壓型PWM整流器控制策略(Control strategy of three phase high power factor PWM rectifier)[J]. 電工技術學報(Transactions of China Electrotechnical Society),2008,23(11):96-102.
[7] 王久和,李華德,王立明(Wang Jiuhe, Li Huade, Wang Liming).電壓型PWM整流器直接功率控制系統(Direct power control system of three phase boost type PWM rectifiers)[J].中國電機工程學報(Proceedings of the CSEE),2006,26(18):54-60.
[8] 瞿興鴻,廖勇,姚駿,等(Qu Xinghong,Liao Yong, Yao Jun,etal).永磁同步直驅風力發電系統的并網變流器設計(Design of grid-connected converter for a permanent magnet synchronous direct-drive wind power generation system)[J].電力電子技術(Power Electronics),2008,42(3):22-24.
[9] Dai Jingya, Xu Dewei, Wu Bin,etal.Dynamic performance analysis and improvements of a current source converter based PMSM wind energy system[C]// International Conference on Computational Intelligence and Security Workshops, Rhodes, Greece: 2008.
[10]Yazdani A, Iravani R. A neutral-point clamped converter system for direct drive variable-speed wind power unit[J].IEEE Trans on Energy Conversion, 2006,21(2):596-607.
[11]徐德鴻.電力電子系統建模及控制[M].北京:機械工業出版社,2005.
[12]吳政球,干磊,曾議,等(Wu Zhengqiu,Gan Lei,Zeng Yi,etal).風力發電最大風能追蹤綜述(Summary of tracking the largest wind energy for wind power generation)[J].電力系統及其自動化學報(Proceedings of the CSU-EPSA),2009,21(4) :88-93.
[13]姚駿,廖勇,莊凱(Yao Jun,Liao Yong,Zhuang Kai).永磁直驅風電機組的雙PWM變換器協調控制策略(Coordinated control strategy of back-to-back PWM converter for permanent magnet direct-driven wind turbine)[J].電力系統自動化(Automation of Electric Power System),2008,32(20):88-92,107.
[14]Zou Zongwei,Yu Haisheng,Tang Yuliang.Maximum output power control of PMSM based on energy shaping and PWM control principle[C]∥IEEE International Conference on Automation and Logistics,Qingdao, China:2008.
[15]李燕,梁英(Li Yan,Liang Ying).永磁直驅風電系統電壓源型變流技術(Voltage source converter technology in permanent-magnet directly driven wind power system)[J].電力系統及其自動化學報(Proceedings of the CSU-EPSA),2010,22(1):65-70.
[16]馬幼捷,楊海珊,周雪松,等(Ma Youjie,Yang Hai-shan,Zhou Xuesong,etal).風電系統的電壓穩定性分析(Voltage stability analysis of wind power system)[J].電力系統及其自動化學報(Proceedings of the CSU-EPSA),2010,22(3):22-26.
李軍軍(1976-),男,博士研究生,講師,研究方向為分布式發電。Email:lijunjun8181972@sina. com
吳政球(1963-),男,博士,教授,博士生導師,研究方向為電力系統分析、電力市場及新能源。Email:zhengqiuwu@163.com
SmallSignalStabilityAnalysisofDirectlyDrivenPermanentMagnetWindPowerSystem
LI Jun-jun1,2, WU Zheng-qiu1, TAN Xun-qiong1
(College of Electrical and Information Engineering, Hunan University,Changsha 410082, China;2.College of Electrical and Information Engineering, Hunan University of Technology,Zhuzhou 412008, China)
Small signal stability mathematical model of directly driven permanent magnet wind power system based on dual PWM converters was established, and the effect on power system stability from parameter variations was researched after wind power system was connected to gird. Some meaningful conclusions were obtained. Maximum power point tracking scheme was applied to wind turbine, and maximum power output was realized in wind power system. Machine side and grid side converters' control structure were studied; then a simulation model was built by Matlab. Time domain analysis were performed in different parameters conditions. Results show system keeps good small signal stability in different parameters conditions, theory analysis correctness was proved, which provides useful theory reference for safe and stable connected operation of direct-driven wind power system.
permanent magnet synchronous generator(PMSG); PWM converter; small signal stability; maximum power point tracking
TM614
A
1003-8930(2012)05-0049-09
2011-03-28;
2011-04-21
國家自然科學基金資助項目(51077046)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
西南交通大學學報(2016年4期)2016-06-15 20:29:37
電測與儀表(2015年8期)2015-04-09 11:50:06