CPⅢ點的點位誤差對全站儀自由設站影響的探討
2012-10-29 09:12:24趙政權
四川建筑 2012年6期
趙政權,羅 虹
(云南國土資源職業學院,云南昆明650217)
1 CPⅢ網簡介
CPⅢ網,即軌道控制網,是布板、安裝軌道的基準控制網。本文以布板時測量的軌道基準點為例,說明CPⅢ點的點位誤差對全站儀自由設站精度的影響。
軌道基準點,簡稱GRP點,在CPⅢ網中采集,精度要求很高,是精確調整博格II型板的依據。GRP點平面部分的測量,是在CPⅢ網中架設全站儀以自由設站的方式進行的,為了保證高精度測量GRP點的平面坐標,在某鐵路客運專線軌道基準點測量技術方案里,對自由設站點的精度做了要求,見表1。

表1 軌道基準點測量時自由設站點精度要求
從表1可以看出:在測量GRP點得坐標時,對自由設站點的精度要求較高,而CPⅢ點的點位誤差,對自由設站點精度的影響是否在表1規定的范圍內,本文采用三維平差,通過數據仿真計算的方法進行討論。
2 三維平差方法的數學模型
進行三維平差時,首先需要的就是測站點的三維近似坐標,下面推導在三維平差中近似坐標計算模型。
測量GRP時,全站儀自由設站的觀測值是斜距、水平方向和天頂距[1],然后由這些觀測值計算出GRP點的坐標。
選取待定點的坐標為未知數,觀測值與未知參數之間建立的關系為非線性函數。按間接平差方法,如果不給出待定點近似坐標,誤差方法就無法列出,故開列測量誤差方程前,必須進行未知參數近似值的計算。
在自由設站點架設全站儀分別觀測CPⅢ點,假設設站點的坐標為(0,0),設站點到其觀測的第一個方向的方位角為0。如圖1,A、B兩點均為CPⅢ點,點O為自由設站點。
然后按自由設站坐標計算方法計算兩個CPⅢ點在儀器站心坐標系下的坐標,其計算方法如下。
點A在儀器站心坐標系下的坐標為:

圖1 坐標轉換計算示意
式中:α、S分別為OA的方位角、距離觀測值。
儀器站心坐標系與CPⅢ網坐標系的坐標轉換關系式為:

式中:XACPIII、YACPIII為A點在CPⅢ坐標系中的坐標;XO'、YO'為設站點O在CPⅢ網坐標系下的坐標;k為尺度參數;β為旋轉參數。
依據式(2)就可以得到測站點的近似坐標,然后根據水平方向、斜距和天頂距3類觀測值的誤差方程,可以算出觀測量誤差方程的系數矩陣B和常數向量L,則誤差方程式的矩陣形式為:

按最小二乘原理,解誤差方程可得:

那么,就可以求得測站點的三維坐標為:

根據協因數傳播律,可得設站點的坐標協因數陣為:

因此,可得設站點的x、y、z坐標中誤差分別為:

其中,σ0為驗后單位權中誤差[2]。
3 CPⅢ點位誤差對自由設站影響的仿真計算
觀測值中存在的誤差,概括來說,是由觀測者、儀器精度以及外界環境引起的。而本文討論的是CPⅢ的點位誤差對自由設站點坐標的影響,因此采用理論觀測值來進行討論。
例:某客運專線某工區有以下一組CPⅢ點,見表2。

表2 CPⅢ成果表
測量GRP的坐標時,全站儀自由設站都是在CPⅢ網中,所以,本文在這些點的區間范圍內,找一個點作為設站點。假設該點為 A(13035.477,2056.1065,30.9404),那么,如果在該點上架設儀器測量各CPⅢ點,理論的各項觀測值見表3(角度已化為度的形式)。
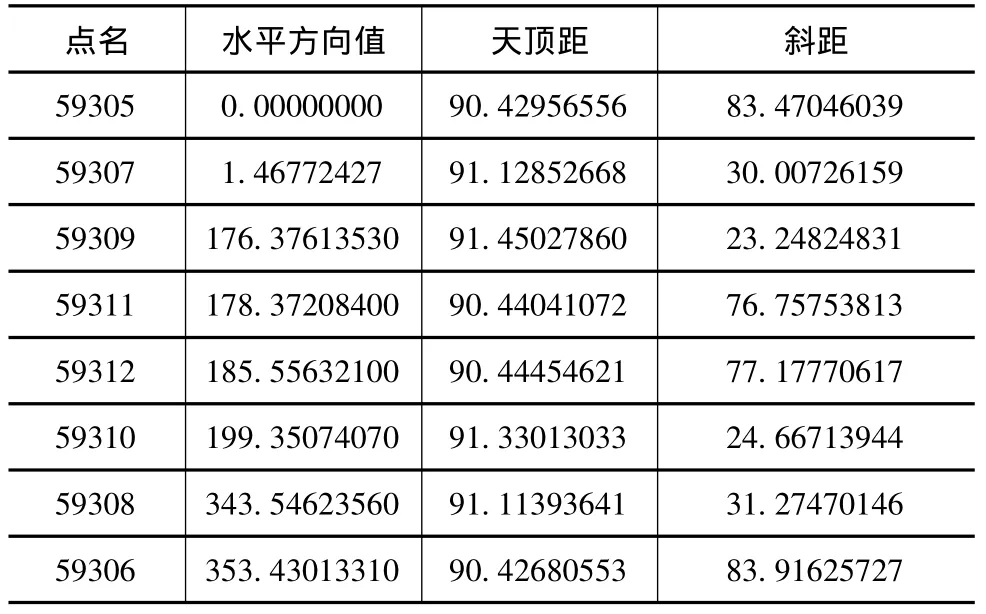
表3 觀測值的真值
高鐵測量規范里面規定,CPⅢ的點位誤差都要求在2 mm以內,在表2的8個CPⅢ點坐標值上,在允許的誤差范圍內,加上符合正態分布的隨機誤差,運用三維平差的方法計算,以此來查看CPⅢ的點位誤差對A點坐標及其精度的影響。計算結果見表4。
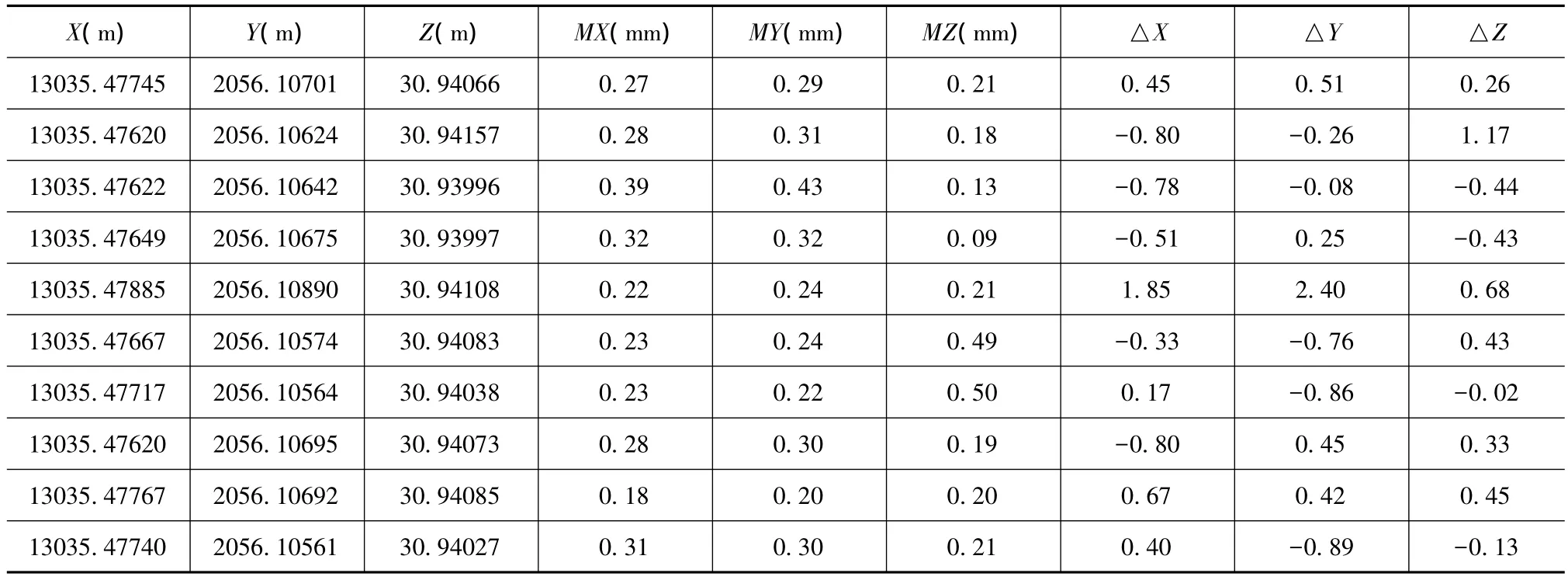
表4 仿真計算結果與真值對比表
通過表4可以看出,隨機數加上之后,對結果和精度都有一定程度的影響,并且大多數還比較明顯(采用真值,MX、MY、MZ 都為0)。
4 結論
由表4可以看出,通過模擬原始數據誤差后的平差結果在不同程度上跟不考慮時有較為明顯的差異,這會導致測量GRP點的結果不準確,而安裝軌道和布板對全站儀自由設站點的坐標精度要求一樣,因此在進行這兩種工序時對于CPⅢ點的點位誤差,應該要加以考慮。
[1]王鵬,劉成龍,楊希.無砟軌道CPⅢ自由設站邊角交會網平差概略坐標計算方法研究[J].鐵道勘察,2008(3):26-29
[2]張忠良,楊友濤,劉成龍.軌道精調中后方交會點三維嚴密平差方法研究[J].鐵道工程學報,2008(5):33-36
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08
