基于混沌小生境粒子群和紋理特征的車牌定位
2012-10-09 03:08:44李澍
制造業(yè)自動化 2012年7期
李 澍
LI Shu
(四川省樂山職業(yè)技術(shù)學院,樂山 614000)
0 引言
車牌的自動識別是計算機視覺、圖像處理與模式識別技術(shù)在智能交通領域應用的重要研究課題之一,是實現(xiàn)交通管理智能化的重要環(huán)節(jié),主要包括車牌定位、字符分割和字符識別等環(huán)節(jié)[1]。其中,車牌定位在整個系統(tǒng)中占有非常重要的地位,是整個車牌自動識別系統(tǒng)的關(guān)鍵。目前車輛牌照定位算法主要基于以下幾種方法[2]:基于圖像彩色信息[3];基于紋理分析[4];基于邊緣檢測[5,6];基于數(shù)學形態(tài)學[7];基于遺傳算法;基于神經(jīng)網(wǎng)絡等。然而,在背景復雜、車牌區(qū)域變形和噪聲污損嚴重的情況下,用這些方法得到的結(jié)果并不十分理想,甚至會產(chǎn)生拒識或誤識。針對上述情況,本文提出了基于混沌小生境粒子群的車牌定位算法。考慮到傳統(tǒng)的車牌特征提取方法會將車牌區(qū)域定位在車燈等其他地方,并且在背景復雜或者噪聲嚴重的情況下,定位的結(jié)果很不理想,會產(chǎn)生拒識或誤識等問題。本文研究了車牌區(qū)域的重點特征,提取7種能夠準確反映車牌區(qū)域的特征向量,構(gòu)成整個車牌的特征矢量。
1 車牌區(qū)域的特征提取
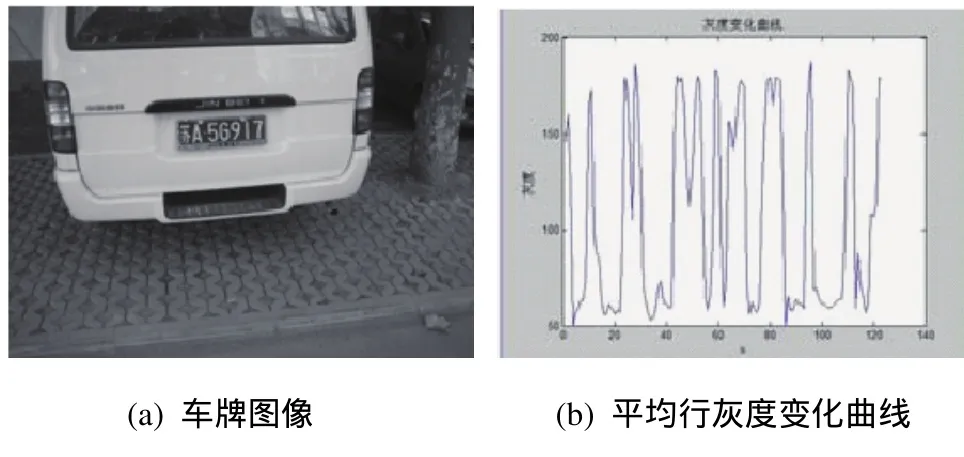
從人眼視覺的角度出發(fā),牌照的字符目標區(qū)域具有如下特點:1)牌照的字符與底色在灰度上有較大差異,而字符與牌照底的內(nèi)部灰度較均勻。2)牌照字符有多個,基本呈水平排列,所以在牌照的矩形區(qū)域內(nèi)存在較豐富的邊緣。3)不同圖像中牌照的具體大小、位置不確定,但大小變化有一定范圍,存在一個最大長度和高度。圖1(a)是一幅隨即抽取的樣本圖像(大小為640×480,256灰度級),圖1(b)為樣本圖像車牌區(qū)域的灰度變化曲線圖(橫坐標代表車牌行位置,縱坐標代表灰度),可以看出,在牌照區(qū)域,灰度曲線變化劇烈,高灰度值與低灰度值之間的差異較大,且波峰波谷有一定的間隔,個數(shù)也相對穩(wěn)定,與其他區(qū)域相比有明顯的區(qū)別。
因此,在圖像上隨機確定一個矩形區(qū)域,其左上角頂點的坐標為(x,y),長度為l,高度為h,對該區(qū)域里的每一行灰度值進行一維的波峰檢測和波谷檢測,然后統(tǒng)計檢測到的波峰波谷,得到車牌區(qū)域的7個特征:1)波峰的密度Den;2)波峰的均值Mp;3)波峰波谷的均值差Mpt;4)波峰絕對差Ap;5)波谷絕對差At;6)波峰間距的絕對差Ad;7)區(qū)域平均每一行的波峰個數(shù)Np。大量的統(tǒng)計實驗表明,這7個特征組成的特征向量V具有較小的類內(nèi)距離和較大的類間距離,而且只與區(qū)域灰度的波峰波谷有關(guān),比起傳統(tǒng)的用灰度直方圖分析的方法,其對噪聲的敏感度大大降低。
根據(jù)上面的7個特征,得到車牌的特征矢量V:

對于車牌特征矢量V,前三個特征值應該較大,后面的三個特征值應較小,最后一個特征值理論上相對穩(wěn)定,應該為14(一般車牌有7個字符)。

然而,Vt中各分量并不具有相等的重要性,例如波峰密度比間距絕對差對類內(nèi)距離的貢獻更大。因此,將Vt進行線性變換,變換后,重要的特征賦予較大的權(quán)值,不重要的特征給予較小的權(quán)值。假定變換矩陣為對角陣,即:

式(3)中,σ2j為模式分量vj方向的樣本方差。可以看出,方差較小的對應加權(quán)系數(shù)大,標志相應的特征更加可靠;相反,方差較大的對應加權(quán)系數(shù)小,標志相應的特征可靠性弱。因此,變換矩陣W將模式向量由Vt空間變換到U空間。

從不同大小、不同位置提取出的特征矢量組成集合{}iU,其中最佳的特征向量U*值代表了車牌區(qū)域,評價準則為

從上面看出,該方法的車牌定位最終歸結(jié)為確定矩形區(qū)域的位置參量x、y,長度參量l,高度參量h,使其得到的特征矢量為最佳。這個全局搜索問題,如果采用遺傳優(yōu)化算法,由于其無記憶性,且容易陷入早熟,搜索到最佳值可能不是全局最優(yōu)解,從而影響到結(jié)果的準確性,計算了也偏大。故本文采用基于混沌變異的小生境粒子群算法搜索最佳特征矢量。
2 基于混沌變異的小生境粒子群算法
2.1 基本粒子群算法
設在n維解空間中,每個粒子i有位置Xi=(Xi1,Xi2,…,Xin)和速度Vi=(Vi1,Vi2,…,Vin),前者表示問題的解,對應的目標函數(shù)值pfiti作為評價該粒子優(yōu)劣程度的適應度;后者表示粒子從當前位置移動到下一個位置的速度大小。算法首先對粒子群進行初始化,然后通過迭代方式在解空間中尋找最優(yōu)解。假設在第t次迭代時刻,粒子i的最優(yōu)解為pbesti (t),稱為個體極值,整個粒子群的最優(yōu)解為gbest(t),稱為全局極值。在t+1時刻,按下式更新自己的速度:

然后以速度Vi(t+1)移動到下一個位置,即:

其中t表示當前迭代次數(shù),學習因子c1=c2=2;r1、r2是均勻分布在(0,1)上的隨機數(shù);慣性因子w設為:w=wmax- t×(wmax-wmin) /tmax,其中tmax表示總迭代次數(shù), wmax和wmin分別表示最大和最小慣性因子,本文wmax=0.95,wmin=0.4。迭代更新過程中,粒子的速率限制在[Vmin,Vmax],Vmin=-Vmax=-8。位置限制在允許范圍內(nèi),最后輸出的gbest為全局最優(yōu)解。
2.2 基于混沌變異的小生境粒子群算法
基本粒子群算法實現(xiàn)簡單,需要確定的參數(shù)少,但它容易陷入局部極值,搜索精度還不夠高。結(jié)合小生境策略全局優(yōu)化與變尺度混沌變異精細搜索兩者優(yōu)點的混沌小生境粒子群算法,可避免算法早熟,保證搜索精度。本文使用的混沌映射Logistic迭代方程為:

在迭代過程中,按下列方程對每個小生境種群中的最優(yōu)個體pbesti(t) =[ X1, X2,…, Xj…, Xn]進行混沌迭代變異:

其中,λg稱為收縮因子,它決定了變量Xj的變異空間,由下式得到:

式中,g為粒子群的進化代數(shù),u用于控制收縮速度,本文中u=2。
現(xiàn)利用基于混沌變異的小生境粒子群算法搜索最佳閾值,算法具體步驟如下:
1)初始化小生境粒子種群。隨機產(chǎn)生m個粒子,并分成n個子種群。[x,y,l,h]作為每個粒子的位置,粒子速度在[,]minmaxVV上隨機產(chǎn)生;工程中,車輛與攝像頭的距離可以通過硬件設施設定,在對大量樣本統(tǒng)計后,可以將車牌大小定為120 ≤l ≤130,38 ≤h≤42,位置范圍也可確定為max max1 ≤x ≤680×l ,240 ≤y ≤480×h。240為圖像高度的一半,這里利用車牌一般在圖像下半部的先驗知識。
2)設計粒子群的適應度函數(shù)。當區(qū)域?qū)氖噶糠稊?shù)很大,且區(qū)域的形狀與車牌的形狀相似時即得到了真實的車牌區(qū)域。因此構(gòu)造適應度函數(shù)f(x,y,l,h)為:
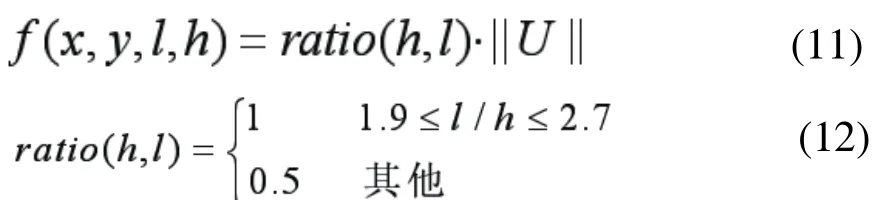
根據(jù)式(11)適應度函數(shù)找出每個小生境種群中的最優(yōu)粒子和全局最優(yōu)粒子;
3)計算兩個粒子種群最優(yōu)個體pbesti(t)與pbestj(t)之間的距離dij。若dij< Rniche(小生境半徑),比較兩個小生境最優(yōu)個體的適應度,低者置零,高者保持不變。對置零的最優(yōu)個體重新初始化,并在其所在的小生境內(nèi)重新選擇最優(yōu)個體,直至任意兩個小生境最優(yōu)個體之間的距離dij≥Rniche;
4)如果迭代次數(shù)達到預定值,則對最劣小生境子種群進行更新初始化;
5)按式(9)對所有小生境最優(yōu)個體的位置進行變尺度混沌變異,進一步提高搜索精度;
6)更新每個粒子的位置和速度;
7)如果滿足結(jié)束條件,則停止迭代,輸出最佳特征矢量,并根據(jù)該矢量精確提取出車牌,否則轉(zhuǎn)2)。
3 結(jié)果分析
為了驗證算法的有效性,本文對大量車牌圖像進行了實驗。并與基于遺傳算法和基本粒子群算法的定位結(jié)果進行了比較,說明了本文方法的穩(wěn)定性和準確性。因篇幅有限,現(xiàn)選取其中4幅圖像作為例子加以說明。

(a) (b)

(c) (d)圖2 隨機抽取的4幅實驗圖像
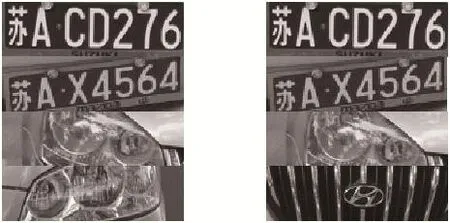
圖3 三種方法的定位結(jié)果
圖2中4幅圖像為隨機抽取的車牌樣本,大小均為640×480,256灰度級,(a)、(b)兩幅圖像干擾因素小,理論上應該三種方法都能準確提取;(c)圖像的車燈處近似于車牌特征矢量,對定位結(jié)果產(chǎn)生很大干擾;(d)圖像不僅車燈處,車牌上方的排風扇也與車牌特征矢量相近,對準確定位帶來很大難度。圖3中從上到下分別對應圖2中4幅圖像基于不同方法定位的結(jié)果,從左往右分別是基于遺傳算法、基本粒子群算法和本文的混沌小生境粒子群算法的定位結(jié)果。可以看出,對于(a)、(b)圖像,三種方法基本都能準確分割;對于(c)圖像,遺傳算法和基本粒子群算法都有一定的概率將車牌定位在了車燈處,也就是優(yōu)化搜索過程中,找到的是局部最優(yōu),而非全局最優(yōu),也反映了遺傳算法容易“早熟”,基本粒子群算法容易陷入局部最優(yōu)的缺點,而本文的混沌小生境粒子群算法能夠準確定位到車牌位置;(d)圖像的遺傳算法存在一定概率將車牌定位在車燈處,基本粒子群算法存在一定概率將車牌定位在了車牌上方的排風扇處,這還是體現(xiàn)了這兩種算法在優(yōu)化搜索的過程中的缺陷,本文方法依然能夠準確定位,不受干擾因素的影響,這也說明了基于混沌變異的小生境粒子群算法在搜索全局最優(yōu)解的過程中,避免了算法早熟或者陷入局部最優(yōu),使得最終的結(jié)果一定是全局最優(yōu),也就能夠準確提取車牌。
4 結(jié)束語
分析表明,本文提取的7種車牌特征向量能夠準確唯一地反映了車牌區(qū)域的特點,將其作為提取車牌的參考標準,提取的準確度高,不易受噪聲,變形等復雜情況的干擾;采用的混沌小生境粒子群算法在保證搜索精度的同時大大降低了四維空間的搜索代價,提高了運行速度,與基于遺傳算法、基本粒子群算法的定位方法相比,本文方法在定位精度和運算時間上都有明顯的優(yōu)勢。
[1] SONG H SH,WANG G Q.The high performance car license plate recognition system and its core techniques[C].Proceedings of IEEE International Conference on Vehicular Electronics and Safety,2005:42-45.
[2] 袁寶明,于萬波,魏小鵬.汽車牌照定位綜述[J].大連大學學報,2002,23(2):6-12.
[3] 曾麗華,李超,熊璋.基于邊緣與顏色信息的車牌精確定位算法[J].北京航空航天大學學報,2007,33(9):3110-3115.
[4] 趙兵,魯敏,匡綱要,于慧穎.基于混合特征的車牌定位算法[J].計算機工程與設計,2007,28(23):5668-5670.
[5] 李慶慶,張燕平.基于模糊邊緣檢測算法的車牌定位[J].計算機技術(shù)與發(fā)展,2006,16(12):7-9.
[6] ZHENG D N,ZHAO Y N,WANG J X.An ef fi cient method of license plate location[J].Pattern Recognition
猜你喜歡
數(shù)學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學生(2021年3期)2021-03-25 11:48:49
世界科學技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
