基于DSP+μC/OS-Ⅱ的裝甲車輛自動(dòng)裝彈機(jī)控制系統(tǒng)設(shè)計(jì)
2012-10-08 07:28:18李培富張振山
裝甲兵工程學(xué)院學(xué)報(bào) 2012年5期
李培富,張振山,李 挺,李 坤
(裝甲兵工程學(xué)院兵器工程系,北京100072)
自動(dòng)裝彈機(jī)是裝甲車輛武器系統(tǒng)的重要組成部分,由程控盒、旋轉(zhuǎn)輸彈機(jī)、提升機(jī)、推彈機(jī)、開(kāi)窗機(jī)構(gòu)、火炮閉鎖器、拋殼機(jī)構(gòu)、配電盒、記憶裝置、彈量指示器、裝彈操縱臺(tái)、調(diào)炮器、觸點(diǎn)開(kāi)關(guān)和控制電纜等組成。穩(wěn)定可靠地實(shí)現(xiàn)裝彈是裝甲車輛武器系統(tǒng)發(fā)揮作戰(zhàn)效能的前提,針對(duì)目前裝彈機(jī)工作不穩(wěn)定、易出現(xiàn)故障的現(xiàn)狀,進(jìn)行控制系統(tǒng)的優(yōu)化設(shè)計(jì),具有一定的工程應(yīng)用價(jià)值。
自動(dòng)裝彈機(jī)是一個(gè)機(jī)電結(jié)合的復(fù)雜系統(tǒng),整個(gè)工作過(guò)程持續(xù)時(shí)間較短,故障前兆不易察覺(jué),出現(xiàn)故障后不易排除。在硬件上,現(xiàn)有裝彈機(jī)的核心部件控制盒采用單片機(jī)、繼電器、觸點(diǎn)開(kāi)關(guān)等器件構(gòu)成。其中繼電器、觸點(diǎn)開(kāi)關(guān)在接通和斷開(kāi)過(guò)程中,存在觸點(diǎn)燒灼、電磁干擾較大、響應(yīng)速度慢等問(wèn)題,降低了系統(tǒng)的可靠性。而且控制盒內(nèi)元器件數(shù)量較多,長(zhǎng)期使用下容易發(fā)生觸點(diǎn)膠合、器件老化等隱患。內(nèi)存容量較小,不能存儲(chǔ)裝彈機(jī)自檢采集的大量數(shù)據(jù)。核心處理器運(yùn)行速率低,集成化程度不高,無(wú)法滿足裝彈機(jī)自檢和實(shí)時(shí)信號(hào)采集需要。在軟件上,缺乏良好的人機(jī)交互平臺(tái)和測(cè)試接口。因此,筆者設(shè)計(jì)了基于DSP控制的自動(dòng)裝彈機(jī)控制系統(tǒng),在實(shí)現(xiàn)現(xiàn)有裝彈機(jī)相應(yīng)功能指標(biāo)的基礎(chǔ)上,提高了控制系統(tǒng)的可測(cè)試性和可靠性,改進(jìn)了系統(tǒng)功能,使操作更加簡(jiǎn)便。
1 系統(tǒng)總體結(jié)構(gòu)
自動(dòng)裝彈機(jī)控制系統(tǒng)主要由數(shù)據(jù)采集模塊、程序控制模塊(CPU)、BIT模塊和顯示操作終端組成,其總體結(jié)構(gòu)如圖1所示。系統(tǒng)實(shí)現(xiàn)的具體功能有:1)系統(tǒng)自檢,控制執(zhí)行部件正確動(dòng)作,實(shí)時(shí)采集裝彈過(guò)程中各觸點(diǎn)開(kāi)關(guān)、行程開(kāi)關(guān)的電壓信號(hào)并存入存儲(chǔ)器,以備故障診斷設(shè)備讀取狀態(tài)數(shù)據(jù);2)串口通信,響應(yīng)操作面板操作信號(hào)并顯示裝彈機(jī)當(dāng)前狀態(tài),上傳故障信息;3)基于CAN總線的檢測(cè)接口,便于外部檢測(cè)設(shè)備采集系統(tǒng)工作信號(hào),實(shí)現(xiàn)故障診斷;4)CAN總線及控制模塊回路實(shí)時(shí)檢測(cè)。
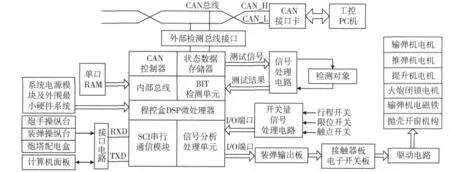
圖1 系統(tǒng)總體結(jié)構(gòu)
提高控制系統(tǒng)的可靠性和抗干擾能力,從硬件結(jié)構(gòu)上采用模塊化設(shè)計(jì),結(jié)構(gòu)獨(dú)立可分離,系統(tǒng)的4個(gè)模塊疊層組合設(shè)計(jì),機(jī)械上可拆分,電氣上采用標(biāo)準(zhǔn)接口相連,便于拆裝更換和維修,實(shí)現(xiàn)故障模塊的定位[1]。控制盒增加外部檢測(cè)接口,以供外部設(shè)備對(duì)其進(jìn)行故障檢測(cè)。各模塊的功能如下。
1)程序控制模塊
該模塊是自動(dòng)裝彈機(jī)程序控制盒內(nèi)的核心部件,主要包括DSP控制芯片及其外圍最小硬件電路、CAN總線通信接口電路、SCI串行通信電路、存儲(chǔ)器等硬件單元。控制模塊采用TI公司生產(chǎn)的TMS320F2812高速微處理器作為核心處理單元,其頻率高達(dá)150 MHz,最大支持外擴(kuò)521 KB×16位FLASH,可以實(shí)現(xiàn)信號(hào)采集處理和驅(qū)動(dòng)執(zhí)行電路,完成對(duì)裝彈系統(tǒng)的控制和通信等功能。
2)數(shù)據(jù)采集模塊
由于車載電源電壓的不穩(wěn)定,繼電器和復(fù)雜電磁環(huán)境等會(huì)對(duì)系統(tǒng)產(chǎn)生干擾且采集的數(shù)據(jù)多為22~26 V的直流電壓開(kāi)關(guān)量信號(hào),所以在數(shù)據(jù)輸入通道中需要設(shè)置隔離器件[2]。CPU根據(jù)采集的開(kāi)關(guān)量信號(hào)判斷當(dāng)前自動(dòng)裝彈機(jī)的工況和彈藥位置,并確定下一步的動(dòng)作,輸出控制指令。
3)BIT模塊
BIT模塊包括故障檢測(cè)信號(hào)生成電路和結(jié)果信號(hào)生成及處理電路。主要功能是定時(shí)向CPU發(fā)送測(cè)試指令,配合CPU模塊生成能夠?qū)ο到y(tǒng)各功能模塊測(cè)試的檢測(cè)信號(hào)和查詢指令,然后將CPU反饋回來(lái)的狀態(tài)信息進(jìn)行解析,并與系統(tǒng)預(yù)設(shè)的狀態(tài)庫(kù)進(jìn)行比較,得出結(jié)論。
4)顯示操作終端
由鍵盤和液晶顯示電路組成,方便武器操作人員進(jìn)行儀表參數(shù)和其他輸入?yún)?shù)的設(shè)置。顯示面板顯示自動(dòng)裝彈機(jī)電氣系統(tǒng)工作狀態(tài)監(jiān)測(cè)和故障報(bào)警信息,鍵盤按鍵實(shí)現(xiàn)裝卸彈、拋殼、記憶等操作功能。系統(tǒng)中采用4個(gè)按鍵組合的方式,通過(guò)菜單方式進(jìn)行系統(tǒng)參數(shù)設(shè)定與操作;采用帶背光的點(diǎn)陣式LCD將有關(guān)參數(shù)、代碼、診斷信息和報(bào)警提示等顯示出來(lái)[3]。
2 控制系統(tǒng)自動(dòng)裝彈工作流程
控制系統(tǒng)經(jīng)過(guò)改造后,裝彈機(jī)的自動(dòng)裝彈機(jī)過(guò)程主體是一個(gè)順序并行過(guò)程,即一個(gè)動(dòng)作完成后觸發(fā)下一個(gè)動(dòng)作過(guò)程。具體工作過(guò)程如圖2所示。
裝彈時(shí),首先進(jìn)行系統(tǒng)自檢,自檢正常后執(zhí)行下一步裝彈動(dòng)作;否則,系統(tǒng)不工作,并顯示自檢故障信息。在自動(dòng)裝彈過(guò)程中,系統(tǒng)采集各節(jié)點(diǎn)開(kāi)關(guān)量電壓信號(hào),經(jīng)處理后作為狀態(tài)信息存入存儲(chǔ)器中。
3 關(guān)鍵電路設(shè)計(jì)
3.1 開(kāi)關(guān)量信號(hào)采集處理電路

圖2 自動(dòng)裝彈工作流程
本設(shè)計(jì)中的電氣隔離選用高速光耦TLP521完成各行程開(kāi)關(guān)的狀態(tài)信號(hào)采集,處理后傳送到DSP處理器,接口電路如圖3所示。為保證I/O接收信號(hào)的質(zhì)量,采用RC電路抑制抖動(dòng)。DSP采用3.3 V供電,而TLP521是24 V供電,為解決電壓匹配問(wèn)題,在隔離輸出總線和DSP數(shù)據(jù)總線之間采用8位總線驅(qū)動(dòng)器74LS245,其使能信號(hào)由74LS138輸出信號(hào)提供。開(kāi)關(guān)信號(hào)屬于突發(fā)事件,采用中斷響應(yīng)的模式實(shí)現(xiàn)各通道數(shù)據(jù)采集。該器件的響應(yīng)時(shí)間為75 ns,根據(jù)響應(yīng)速度及信號(hào)頻率指標(biāo)要求,能夠滿足模塊設(shè)計(jì)要求。
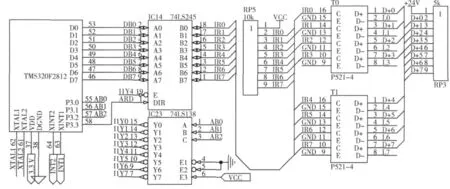
圖3 開(kāi)關(guān)量采集接口電路
3.2 BIT故障診斷電路
系統(tǒng)開(kāi)發(fā)過(guò)程中融入了BIT設(shè)計(jì)技術(shù),以實(shí)現(xiàn)控制系統(tǒng)狀態(tài)檢測(cè)和故障診斷。而在以往型號(hào)的自動(dòng)裝彈機(jī)控制中能否采用BIT設(shè)計(jì)一直存在異議,原因是裝彈機(jī)控制系統(tǒng)數(shù)字化程度較低,常規(guī)BIT設(shè)計(jì)幾乎無(wú)一例外地要為測(cè)試而增加大量的附加零部件,對(duì)裝彈機(jī)的固有可靠性帶來(lái)一定的不良影響。本文設(shè)計(jì)的控制系統(tǒng)數(shù)字化、智能化的特點(diǎn)為BIT技術(shù)設(shè)計(jì)創(chuàng)造了有利的條件。具體診斷方案為:由核心控制芯片DSP控制,在不損害器件本身的前提下,對(duì)不同測(cè)試目標(biāo)輸入相應(yīng)的測(cè)試信號(hào),通過(guò)測(cè)試回路的結(jié)果信號(hào),確定目標(biāo)的故障類型及性質(zhì)。圖4為CAN通信電路的BIT設(shè)計(jì),采用了高速光耦HCPL0600對(duì)通信接口電路進(jìn)行電氣隔離。

圖4 CAN故障檢測(cè)電路
當(dāng)DSP收到BIT單元檢測(cè)指令后發(fā)出檢測(cè)使能信號(hào),同時(shí)DSP輸出I/O控制信號(hào),驅(qū)動(dòng)回繞開(kāi)關(guān)形成CAN發(fā)送端TXD到接收端RXD的自發(fā)自收回路;同時(shí),DSP控制外圍CAN模塊發(fā)送測(cè)試消息序列,并通過(guò)判斷發(fā)送郵箱和接收信箱消息內(nèi)容的方式實(shí)現(xiàn)總線通信電路的故障檢測(cè)。
3.3 功率驅(qū)動(dòng)電路
考慮到系統(tǒng)使用的電子開(kāi)關(guān)和驅(qū)動(dòng)電機(jī)負(fù)載電流較大,設(shè)計(jì)了電子開(kāi)關(guān)和電機(jī)的驅(qū)動(dòng)電路。裝彈機(jī)執(zhí)行電機(jī)是直流電機(jī),采用了以DSP作為主控部件的PWM調(diào)速系統(tǒng),由DSP輸出端口P2.0和P2.1發(fā)出PWM脈沖信號(hào),通過(guò)調(diào)節(jié)加到電機(jī)上的占空比實(shí)現(xiàn)電機(jī)轉(zhuǎn)速控制。電機(jī)驅(qū)動(dòng)是由普林頓管組成的H型橋式驅(qū)動(dòng)電路,主要放大器件是大功率三極管,功率驅(qū)動(dòng)電路如圖5所示[4]。該驅(qū)動(dòng)電路輸出功率大,開(kāi)關(guān)的響應(yīng)時(shí)間短,性能可靠。
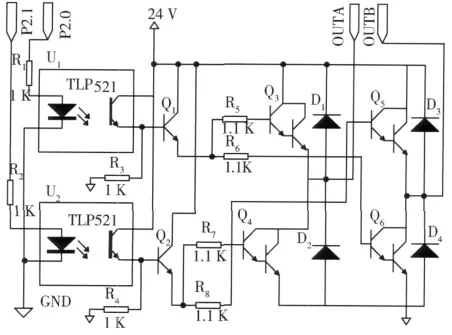
圖5 電機(jī)驅(qū)動(dòng)電路
系統(tǒng)利用2個(gè)光電耦合器將處理器與電機(jī)系統(tǒng)電源隔離起來(lái),經(jīng)過(guò)光耦控制Q1和Q2的通斷,防止驅(qū)動(dòng)模塊電路對(duì)微處理器產(chǎn)生干擾。當(dāng)數(shù)字驅(qū)動(dòng)信號(hào)P2.0為高、P2.1為低時(shí),光耦U1工作,Q1導(dǎo)通,放大管Q3工作,使電機(jī)輸入端OUTA為高,OUTB為低,電機(jī)流過(guò)正向電流,實(shí)現(xiàn)電機(jī)正向轉(zhuǎn)動(dòng)。反之,當(dāng)P2.1為高、P2.0為低時(shí),實(shí)現(xiàn)電機(jī)反向轉(zhuǎn)動(dòng)工作。電機(jī)的2種工作轉(zhuǎn)速通過(guò)信號(hào)端P2.0和P2.1信號(hào)脈寬調(diào)制實(shí)現(xiàn)。
3.4 DSP控制模塊
裝彈機(jī)控制系統(tǒng)的關(guān)鍵在于信號(hào)的及時(shí)準(zhǔn)確處理及控制響應(yīng),需要強(qiáng)大的數(shù)據(jù)處理能力,因此系統(tǒng)中采用TI公司DSP芯片TMS320F2812作為信號(hào)處理及系統(tǒng)控制核心,通過(guò)外擴(kuò)SRAM增強(qiáng)數(shù)據(jù)存儲(chǔ)能力,控制模塊功能框圖如圖6所示。
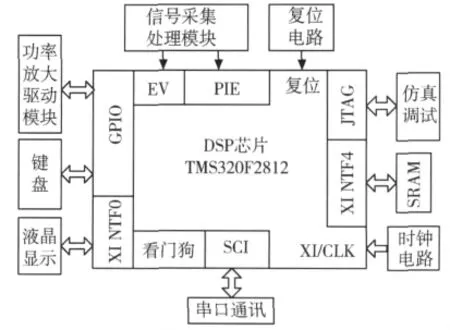
圖6 控制模塊功能框圖
TMS320F2812內(nèi)核是C2000平臺(tái)上的定點(diǎn)32位DSP,主頻150 MHz,處理性能可達(dá)150 MIPS,采用哈佛總線結(jié)構(gòu),具有密碼保護(hù)機(jī)制,從而為系統(tǒng)高速處理和實(shí)時(shí)響應(yīng)提供了充分的條件[5]。本系統(tǒng)中采用芯片內(nèi)部集成的事件管理器模塊的PWM功能實(shí)現(xiàn)電機(jī)控制;采用GPIO及中斷管理鍵盤操作;看門狗防止系統(tǒng)出現(xiàn)死機(jī)情況;采用PIE模塊管理全部中斷操作;外擴(kuò)SRAM映射到XINTF4空間;并口液晶映射到F2812的XINTF0空間;程序的下載調(diào)試由JTAG接口進(jìn)行。
4 軟件實(shí)現(xiàn)
控制系統(tǒng)作為自動(dòng)裝彈機(jī)電氣設(shè)備的控制樞紐,必須具有很強(qiáng)的穩(wěn)定性和很高的實(shí)時(shí)性[6]。本系統(tǒng)軟件的構(gòu)建基于μC/OS-Ⅱ?qū)崟r(shí)操作系統(tǒng),主要包括系統(tǒng)移植和系統(tǒng)任務(wù)劃分及實(shí)現(xiàn)。
4.1 系統(tǒng)移植
μC/OS-Ⅱ的移植要求處理器可重入代碼,用C語(yǔ)言可打開(kāi)和關(guān)閉中斷,有讀出存取堆棧指針和寄存器的指令,支持中斷并能產(chǎn)生定時(shí)中斷,能夠容納任務(wù)堆棧等條件。TMS320F2812完全滿足上述條件,所以系統(tǒng)的移植沒(méi)有問(wèn)題。移植主要工作有:
1)編寫與處理器相關(guān)的程序代碼,包括頭文件OS_CPU.H、C文件OS_CPU_C.C和ASM文件OS_CPU_A.ASM,完成處理器的預(yù)定義和用戶任務(wù)的堆棧初始化;
2)在OS_CPU_A.ASM文件中修改4個(gè)主要的匯編函數(shù),即 OSStartHighRdy()、OSIntCtxSw()、OSTickISR()和OSCtxSw(),完成控制系統(tǒng)不同優(yōu)先級(jí)任務(wù)的切換和相關(guān)功能實(shí)現(xiàn)以及時(shí)鐘節(jié)拍設(shè)置[7];
3)修改INCLUDES.H和OS_CFG.H文件,完成用戶頭文件和控制系統(tǒng)基本情況的設(shè)置。
4.2 系統(tǒng)任務(wù)劃分及實(shí)現(xiàn)
μC/OS-Ⅱ移植完成系統(tǒng)能夠穩(wěn)定正常運(yùn)行后,就可以進(jìn)行控制系統(tǒng)項(xiàng)目開(kāi)發(fā)。本設(shè)計(jì)中采用模塊化設(shè)計(jì)方案,主要功能模塊劃分為初始化模塊、信號(hào)采集模塊、核心邏輯控制模塊、執(zhí)行部件驅(qū)動(dòng)模塊、CSI通信模塊、CAN通信模塊和人機(jī)接口模塊。將每一個(gè)模塊作為一個(gè)獨(dú)立的程序裝入到對(duì)應(yīng)的一個(gè)任務(wù)中,并設(shè)置任務(wù)函數(shù)的掛起方式和掛起時(shí)間。每個(gè)任務(wù)具有唯一確定的優(yōu)先級(jí),優(yōu)先級(jí)數(shù)越小,優(yōu)先級(jí)越高。將任務(wù)以鏈表的形式進(jìn)行優(yōu)先級(jí)排序,通過(guò)優(yōu)先級(jí)的比較來(lái)實(shí)現(xiàn)任務(wù)的切換,由主程序統(tǒng)一調(diào)用和協(xié)調(diào)各任務(wù)正常有序工作[8]。系統(tǒng)任務(wù)程序運(yùn)行如圖7所示。

圖7 μC/OS-Ⅱ任務(wù)運(yùn)行結(jié)構(gòu)
5 結(jié)論
本文采用DSP芯片TMS320F1812為主控芯片配以輔助電路實(shí)現(xiàn)自動(dòng)裝彈機(jī)控制系統(tǒng)的設(shè)計(jì),在原有功能基礎(chǔ)上開(kāi)發(fā)了BIT和外部檢測(cè)接口,為自動(dòng)裝彈機(jī)在線檢測(cè)和車外故障診斷提供基礎(chǔ)。該系統(tǒng)克服了現(xiàn)有裝彈機(jī)控制系統(tǒng)結(jié)構(gòu)復(fù)雜、集成度低、自身檢測(cè)能力弱等問(wèn)題,可靠性、可測(cè)試性、操控性均有所提高;優(yōu)化了顯示操作方式,采取了抗干擾措施和系統(tǒng)誤碼兼容設(shè)計(jì)。
[1] 張振山,李貞偉.自動(dòng)裝填系統(tǒng)故障檢測(cè)適配器設(shè)計(jì)[J].計(jì)算機(jī)測(cè)量與控制,2011,19(8):1838-1840.
[2] 魏巍,馬曉軍,侯明杰.基于DSP的裝甲車輛數(shù)字滅火控制系統(tǒng)設(shè)計(jì)[J].儀表技術(shù),2008(7):24-26.
[3] 楊雙龍,徐科軍,梁利平,等.基于DSP的漿液型電磁流量計(jì)的研制[J].儀器儀表學(xué)報(bào),2011,32(9):2101-2107.
[4] 李挺,杜恩祥,魯輝東,等.虛擬儀器的自動(dòng)裝彈機(jī)故障檢測(cè)平臺(tái)的設(shè)計(jì)[J].火力與指揮控制,2008,33(增刊):100-102.
[5] 王田苗.嵌入式系統(tǒng)設(shè)計(jì)與實(shí)例開(kāi)發(fā)[M].北京:清華大學(xué)出版社,2002:103-104.
[6] 魏曙光,馬曉軍,閆之峰,等.基于DSP的坦克電源管理系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)[J].儀表技術(shù),2008(8):65-67.
[7] 謝蓉,趙凱瑞,王新民.實(shí)時(shí)操作系統(tǒng) μC/OS-Ⅱ在DSPTMS320LF2407A上的移植、裁剪及應(yīng)用[J].計(jì)算機(jī)應(yīng)用,2006,26(11):2759-2761.
[8] 孫彪,劉凱,許明恒.μC/OS-Ⅱ在TMS320F2812平臺(tái)上的移植[J].微處理機(jī),2009(6):15-17.
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
