重載滾珠絲杠試驗儀的設計*
2012-09-28 13:18:48殷愛華
制造技術與機床 2012年3期
關鍵詞:系統
黃 寬 殷愛華
(南京理工大學機械工程學院,江蘇南京 210014)
滾珠絲杠副是機械系統的關鍵傳動部件,近幾年來隨著市場需求的不斷增大,“重載、高速、精密”已經成為滾珠絲杠副發展的主導方向。為了提高重載滾珠絲杠副的性能,研究滾動功能部件在重載下運行時的彈性變形、可靠性和工作壽命,從而便于對產品結構、主要參數、驅動方式以及制造技術(含材料)等方面進行剖析,因此設計了重載滾珠絲杠性能試驗臺。
1 系統總體方案
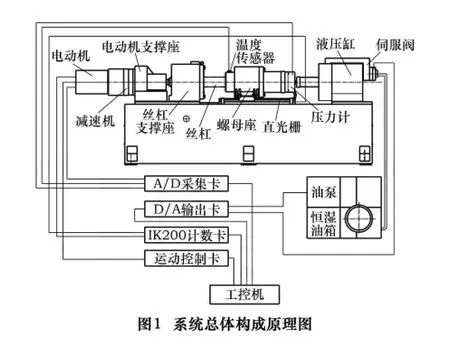
重載滾珠絲杠性能檢測系統包括3個分系統:(1)是基于研華1713A/D采集卡和IK220計數卡組成的采集系統,用于采集各個傳感器的輸出信號,并實現從模擬量向數字量的轉換;(2)是基于1720D/A輸出卡和固高運動控制卡組成的控制系統,用于控制伺服電動機和伺服液壓缸實現對重載滾珠絲杠副實際工況的模擬;(3)是數據處理分析軟件系統,用于對獲取的數據進行處理,并計算出溫升、加載力、轉速、反向間隙和噪聲等參數。其系統總體構成原理圖如圖1所示。
該試驗儀模擬滾珠絲杠在實際使用中的安裝環境,在螺母支座下面安裝有滾珠直線導軌,用被測的滾珠絲杠副傳動,通過聯軸器把伺服電動機與絲杠直連,用控制器來控制絲杠轉速、方向,拖動工作臺左右移動。同時,伺服液壓缸在螺母座軸向方向上加載一個恒定的力在螺母支座上,模擬實際使用中螺母座所受的軸向力。
通過各種傳感器采集溫升、加載力、轉速、反向間隙和摩擦力矩等數據并由采集卡送入計算機,由計算機軟件進行計算處理并直接顯示,并且還可以存儲數據便于后續的分析與評定。
2 試驗儀機械部分設計
試驗儀的機械部分主要用于承載伺服液壓缸、伺服電動機、直線導軌和絲杠,其作用是保證測量過程中工作臺的移動和加載壓力,主要由床身、液壓缸支座、壓力計支座、螺母支座、軸承支座、聯軸器和電動機支座等部分組成(圖2)。
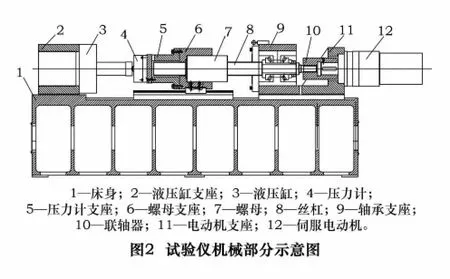
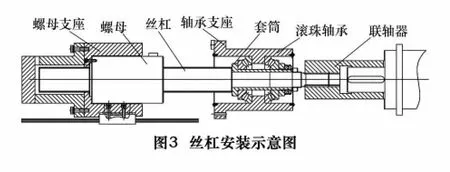
床身是試驗儀的重要組成部分,要保證在測量過程中能夠承載20 t的加載力。液壓缸支座、軸承支座和電動機支座通過螺栓聯接在床身上,這3個支座的軸心要保證同軸,以防液壓桿作用在螺母支座上會產生彎矩。螺母支座安裝在直線導軌上,保證能夠流暢地滑動,無卡滯現象。絲杠的右端通過套筒和滾動軸承固定在軸承支座上(圖3),當要拆卸時,只要把螺母支座移開同時松開聯軸器就可以把絲杠從套筒里取出,這樣方便絲杠的取出并且避免經常拆卸軸承造成軸承內圈損壞。
3 試驗儀電路設計
該試驗儀的電路部分設計包括2部分:(1)是由采集卡采集各路傳感器的信號并通過計算機串口提供給計算機進行數據處理顯示。主要由研華1713A/D采集卡和IK220計數卡組成;(2)是計算機通過固高運動控制卡和1720D/A輸出卡分別控制伺服電動機和伺服液壓缸。
3.1 數據采集部分電路設計
本試驗儀需要測量絲杠跑合后的溫升、摩擦力矩、反向間隙、加載力和轉速。
(1)溫升的測量:系統采用接觸式溫度傳感器——Pt100。溫度傳感器的輸出電壓經溫度變送器后轉換成與溫度對應的電壓值。
(2)摩擦力矩的測量:系統采用的是西門子驅動器,控制模塊的75.A端子上可以輸出與電動機扭矩對應的模擬量。電動機扭矩包括減速機的摩擦力矩、直線導軌的摩擦力矩、絲杠的摩擦力矩,即T電動機=T減速機+T直線導軌+T絲杠。經過大量跑合后發現減速機的摩擦力矩和直線導軌的摩擦力矩趨于一個定值。因此絲杠的摩擦力矩T絲杠=T電動機-T直線導軌-T減速機。而電動機扭矩的值可以直接在西門子調試助手SIMOCOM U讀出來。多采集幾組數據,再用最小二乘法擬合出電流值與摩擦力矩之間的函數關系。
(3)反向間隙的測量:先記錄下圓光柵的起點位置θ1,接著螺母座移動10 mm距離再返回起點,記錄下此時圓光柵的位置θ2。則反向間隙=[360°×20/(2 048 ×50)]× |θ2- θ1|。式中:360°/2 048 為電動機旋轉的角度,50為減速器的減速比,20 mm為絲杠的導程,2 048為編碼器的刻線。
(4)加載力的測量:系統采用的是力達測控有限公司MCC-F(50 t)輪輻式承重傳感器。由于壓力變送器的輸出為1~5 V的電壓信號(即1 V≈12.5 t)。把采集到的電壓信號乘以12.5便得到加載力。
(5)轉速的測量:用IK220計數卡采集電動機編碼器輸出的脈沖,絲杠轉速=絲杠角速度/(2×π),單位:r/min。絲杠角速度 =[60 000×3.141 6×360°/180°×2 048為采集周期),單位:rad/min。絲杠轉速=29.196 9×(Y/T)×1/50=0.585 9×Y/T,單位:r/min。
3.2 控制部分電路設計
試驗儀工作時,螺母座需要以恒定的速度運行,同時加載在螺母座軸向方向上的壓力也要能夠保持恒定。由于采用西門子控制器,因此絲杠的轉速可以通過西門子驅動器控制,我們只需采用固高運動控制卡控制驅動器的56.A端子上的電壓,剩下的就是控制液壓缸的加載力。
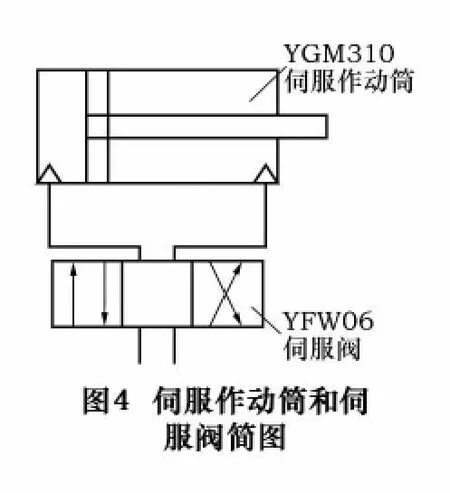
35 t液壓伺服加載系統的工作原理:YU80油源提供壓力、流量給YGM310伺服作動筒(圖4),用以滿足系統加載所需的力、行程和速度要求。YGM310伺服作動筒的換向是由YFW06伺服閥控制的,通過 PCI-1720D/A輸出卡輸出的電流控制伺服閥的動作。PCI-1720的電流輸出電路圖如圖5所示。在選擇VS和RL時,必須滿足下面的條件:

式中:VS為電路的觸發電源;RL為負載電阻;PD為FET消耗的電流。
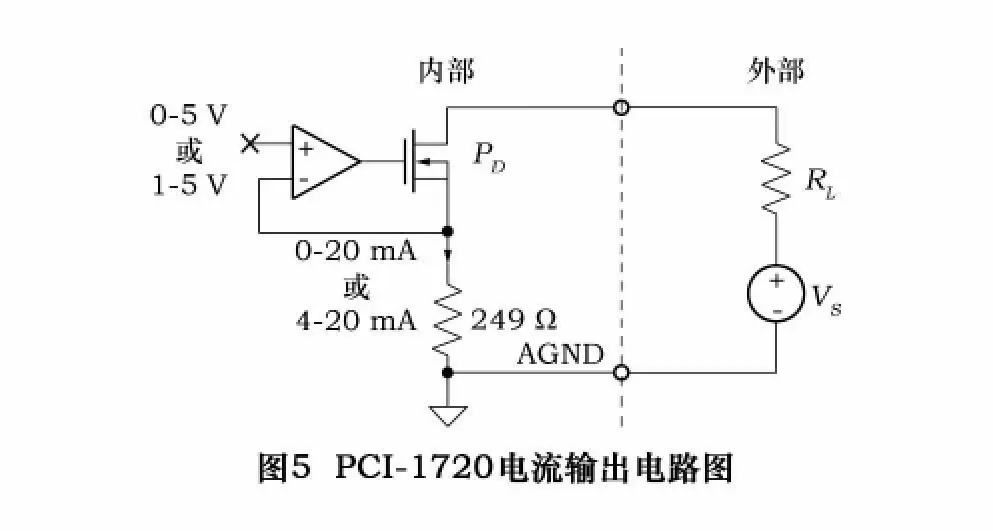
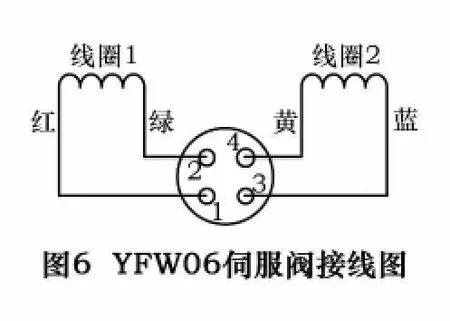
圖6為伺服閥的接線圖,每個線圈的阻值為80 Ω,可以采用串聯接法,也可以采用并聯接法,但必須滿足上述條件。經過計算,當采用串聯接法即總阻值為160 Ω時滿足上述條件。因此本系統采用串聯接法(即引腳2與引腳4連接,引腳1、3兩端接電流控制信號),只要改變引腳1、3兩端的極性就可以實現換向。
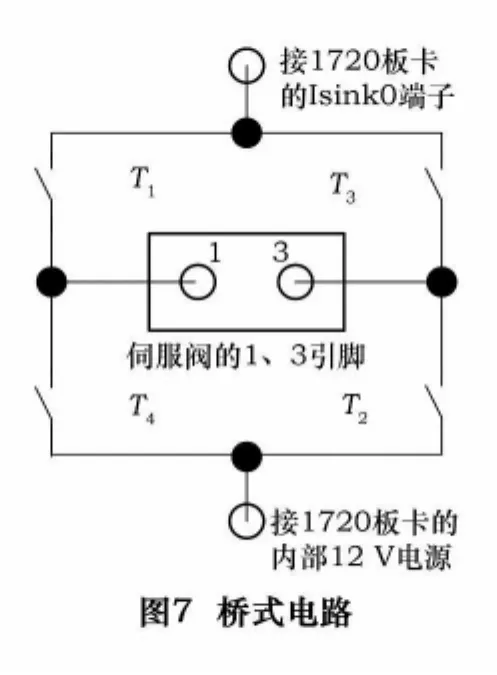
但是PCI - 1720D/A 的電流輸出為0 ~ 20 mA 或4~20 mA,不能改變極性,因此需要用4個繼電器組成一個橋式電路來改變引腳1、3兩端電流信號的極性(見圖7)。4個繼電器由固高運動控制卡的通用輸出口控制。
4 試驗儀的控制設計
對于液壓缸的加壓采用PID算法控制。在連續控制系統中,按偏差的比例(P)、積分(I)和微分(D)進行控制的PID控制(或稱PID調節)是最常用的一種控制規律,它具有原理簡單、易于實現、魯棒性強和適用范圍廣等特點。PID調節器的參數有3個,即比例度δ、積分時間TI和微分時間TD。三者只要按被控對象的特性匹配設計,就能充分發揮各自的優點,較好地滿足控制要求。
在機電一體化系統中,數字PID控制算法也被廣泛應用。機電一體化系統控制對象的模型復雜,系統參數經常發生變化,采用PID調節器,算法簡單,工作量較小,其參數比例系數Kp、積分時間系數TI、微分時間系數TD相互獨立,便于實現多回路控制。為了用計算機實現PID控制規律,采用數字PID算法。設T為采樣周期,k=0,1,2,…,i,…為采樣序列。因采樣周期T相對信號變化周期很小,所以可用矩形面積的和近似式(2)中的積分,用向后差分的方法近似式(3)中的微分。即
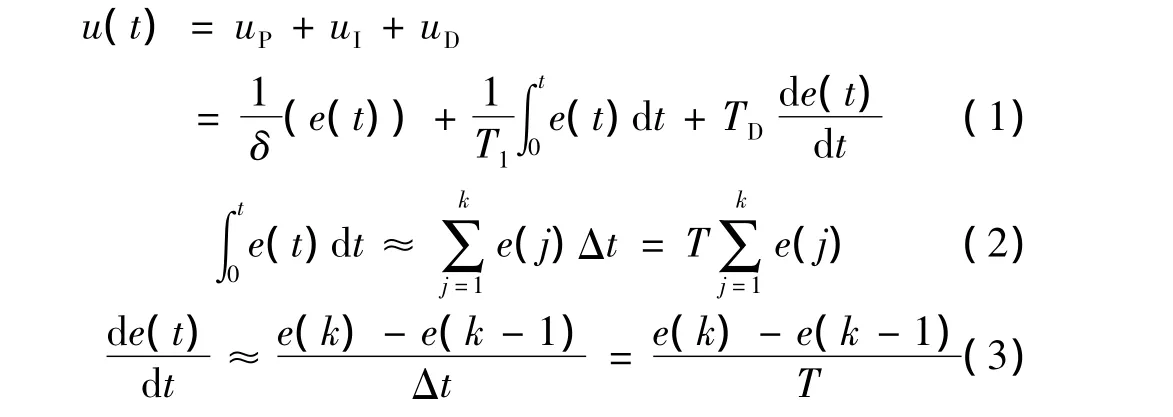
將式(2)、(3)代入式(1),得:

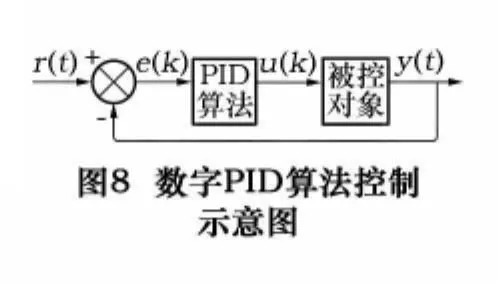
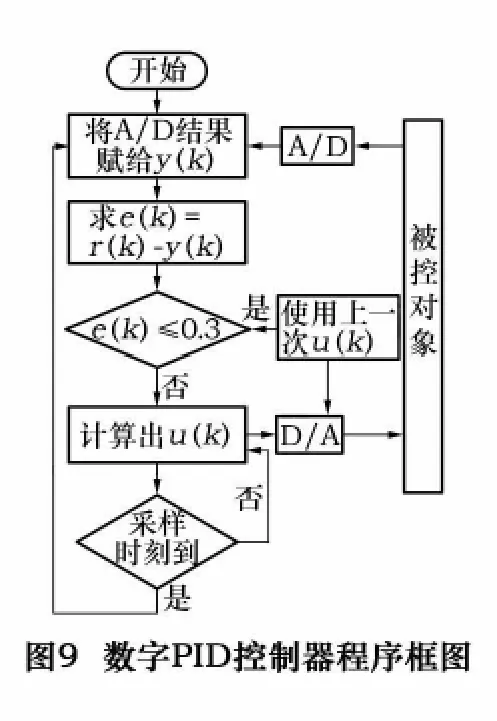
式中:k為采樣序列,k=0,1,2,…;u(k)為第k次采樣時調節器的輸出;T為采樣周期,應使T足夠小,才能保證系統精度;e(k)為第k次采樣時刻的偏差值;e(k-1)為第(k-1)次采樣時刻的偏差值。式(4)的輸出量u(k)為全量輸出,其控制示意圖如圖8所示。圖9為式(4)表示的數字PID控制器程序框圖。
5 軟件設計
系統控制軟件采用VB語言編寫,軟件設計中大量采用模塊設計思想,將各個功能程序盡量封裝在功能模塊中,使程序條理清晰,語言簡化,集成率高。本系統主要包括以下模塊:電動機初始化、電動機運行、電動機停止、動態測量與顯示、PID控制、板卡初始化和數據采集。
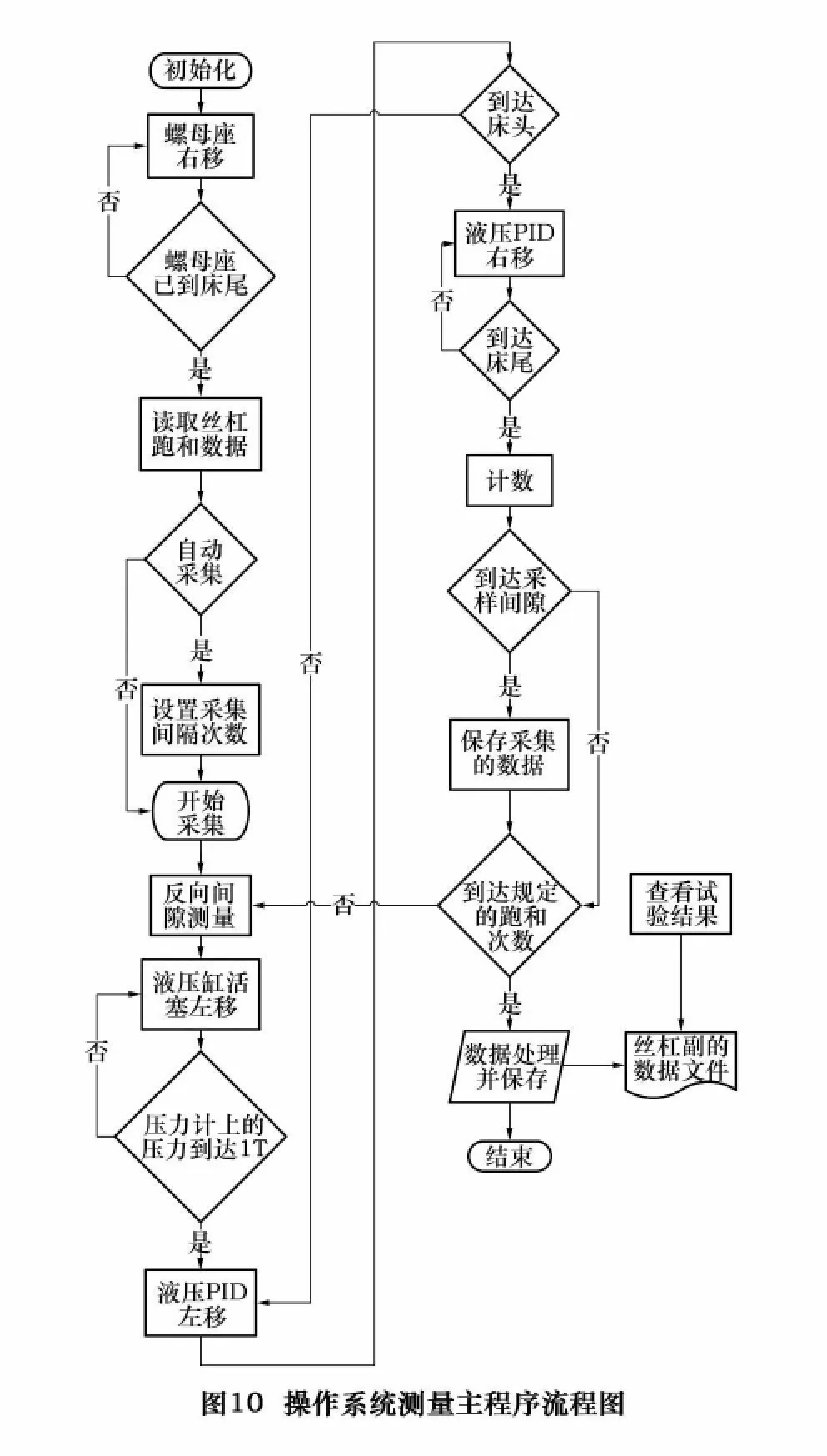
在測量過程中,系統自動采集數據、自動保存數據并且能記錄絲杠已經跑合到第幾組、第幾次,當下次做實驗時可以接著做而不須重新設置跑合參數,從而大大降低操作者的勞動強度。操作軟件測量主程序流程圖如圖10所示,運行時的界面如圖11所示。
6 結語
本系統已通過驗收,各項技術指標均已達到設計要求,能夠可靠運行。通過本測試系統可以測試重載滾珠絲杠副的壽命、傳動精度、溫升、加載能力及摩擦力矩喪失情況。結合其他試驗臺的聯合測試,可得到承載工況后重載滾珠絲杠副的定位精度,絲杠、螺母的齒形變形量、齒面點蝕、磨損量及鋼球的磨損量。本系統為重載滾珠絲杠副的優化設計提供實驗數據,為漢江機床有限公司提升絲杠品質和產品競爭力提供了有力保證。
[1]吳保群,徐建生.重載絲杠螺母副的摩擦學系統模型的建立[J].機械設計與研究,2002(18):38-40.
[2]于復生,宋現春,沈孝芹,等.滾珠絲杠誤差檢測的速度自適應系統[J].制造技術與機床,2004(4):85 -87.
[3]黃其圣,胡鵬浩.滾珠螺旋傳動系統的剛度計算[J].工具技術,2000,34(2):29 -31.
[4]張玉清,李玉鳳,宋現春,等.基于STC89C52單片機的滾珠絲杠副剛度檢測系統[J].山東建筑大學學報,2009(2):111-114.
[5]王兆坦,宋現春.影響滾珠絲杠副摩擦力矩的因素及其測量方法[J].機械工人,2007(增刊):16 -19.
[6]姜洪奎,宋現春.滾珠絲杠副滾珠循環系統的動力學研究和仿真[J].振動與沖擊,2007(3):107 -110.
[7]陳豪.基于MATLAB的滾珠絲杠動力學建模與仿真分析[J].甘肅科技,2007(4):130-132.
[8]張嘵晶.絲杠滾道型面測量儀機械系統設計與分析[D].南京:南京理工大學,2009.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32