PowerMILL Robot Interface離線編程系統
2012-10-23 10:03:26王振江
制造技術與機床 2012年3期
王振江
(Delcam(中國)上海辦事處,上海 200070)
近年來機器人在世界上很多國家都逐漸得到應用,鑒于人工智能技術尤其是仿生技術還不太成熟,機器人的應用主要還是集中在工業生產制造領域。包括我們中國在內的不少先進制造企業也陸陸續續引入了工業機器人,機器人的諸多優勢已得到各行各業的廣泛認可。將機器人引入生產流程的制造商,絕大部分都看到了產能與效率的顯著改觀。不久前,國際機器人聯合會(The International Federation of Robotics,IFR)經調查得出制造商投資機器人的10大理由,這10大理由包括降低運營成本、提升產品質量和一致性、改善員工工作條件、擴大產量、增強制造柔性、減少原料浪費、提高良品率等。
多達6軸及以上的Robot具備了更大的加工自由度,適合復雜零部件的加工;Robot對場地的要求比較低,對惡劣環境的適應性更強,特別適合高噪聲、高粉塵、高溫、有毒、寒冷和核放射等對人體危害較大的惡劣環境;Robot的“關節臂”比較長,也非常適合大型零部件的加工。
Robot設備目前被廣泛應用于:
(1)加工:石材和木材等材料的雕刻、模型加工(泡沫、樹脂……);
(2)剪切:使用銑削刀具、專用刀具、噴水器等修剪很多種類的材料;
(3)鉆孔:對很多種類的材料進行快速鉆孔;
(4)焊接/噴涂:等離子切割、激光切割、電鍍、噴涂;
(5)測量:非破壞性驗證量測;
(6)搬運、裝配等等其他眾多場所。
英國Delcam軟件公司在加工制造領域提供了高端的PowerMILL、PartMaker、FeatureCAM、ArtCAM及DentMILL等軟件,分別應用于各種制造領域。該公司在最近幾年還推出了基于PowerMILL平臺的工業機器人編程軟件PowerMILL Robot Interface,這款軟件最近幾年在西方發達國家已經得到了廣泛的應用,解決了Robot機器人自帶編程系統對于復雜程序尤其是銑削切割程序處理能力略顯不足的問題,能夠進行機器人的離線編程,對于機器人的控制技術方面有著極為重要的意義。
PowerMILL Robot Interface支持目前世界上主流的 Robot設備,比如:FANUC、ABB、KUKA、STABLI和 MOTMAN等著名的機器人,也可以根據需求定制不同的Robot編程系統。
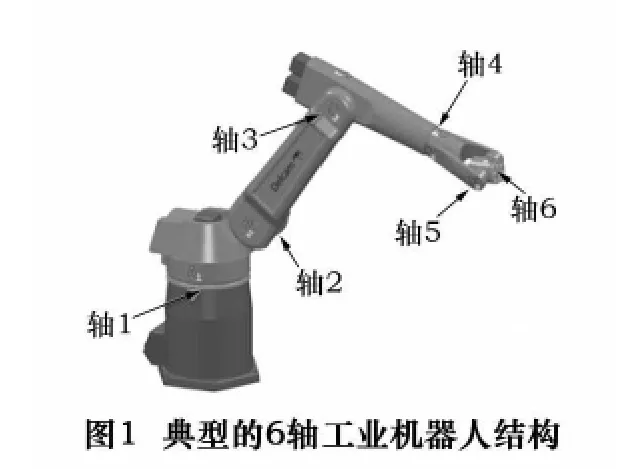
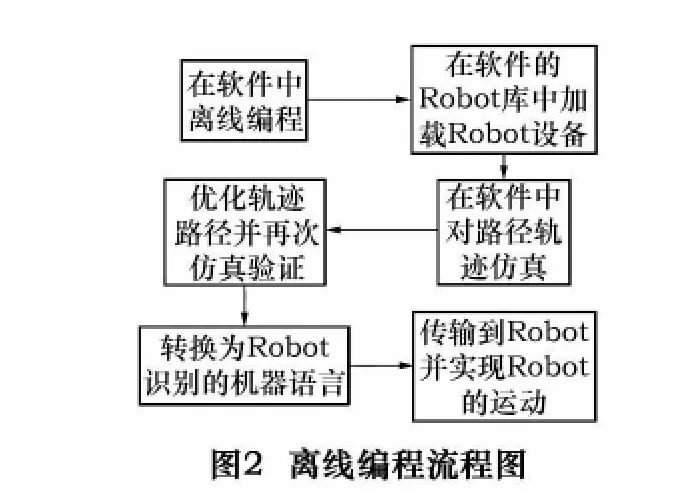
圖1是一個6軸的典型Robot模型,PowerMILL Robot Interface的離線編程流程如圖2。
下面通過一個實例來簡要說明PowerMILL Robot Interface的離線編程。
(1)編寫軌跡路徑:加載項目文件“DemoToolControl1”到 PowerMILL Robot Interface軟件,范例文件可以在軟件安裝后的目錄找到:C:Program Files(x86)DelcamDelcam PowerMILL Robot Interface 2012(x.x.xx)LibraryProjectsDemoToolControl1,見圖3(可以看到該項目文件中已經存在了2個軌跡,因為刀具路徑軌跡的軌跡編制比較簡單,基本上和PowerMILL軟件是相同的,鑒于篇幅限制在此不做詳述)。
(2)選擇軌跡路徑:左側邊欄(圖3)激活刀具路徑Knife路徑。

(3)選擇Robot機床:從右側邊欄頂端選擇“Robot”,可以看到默認的庫里面已經有一些品牌(FANUC、ABB等)的Robot在機床庫中了,在這里我們鼠標左鍵雙擊選擇Delcam-6X-Knife機器人設備。這臺設備已經裝載了“扁形”的切割刀頭。
(4)設定工件及機床位置:在“Simulation”狀態下,選擇圖標使Robot設備初始化到缺省位置。
(5)仿真軌跡:點擊“Play”按鈕,開始仿真。觀察仿真狀態,放大后見圖4。從圖4右圖可以明顯看到刀具過切到工件內部區域,需要進行優化調整軌跡。
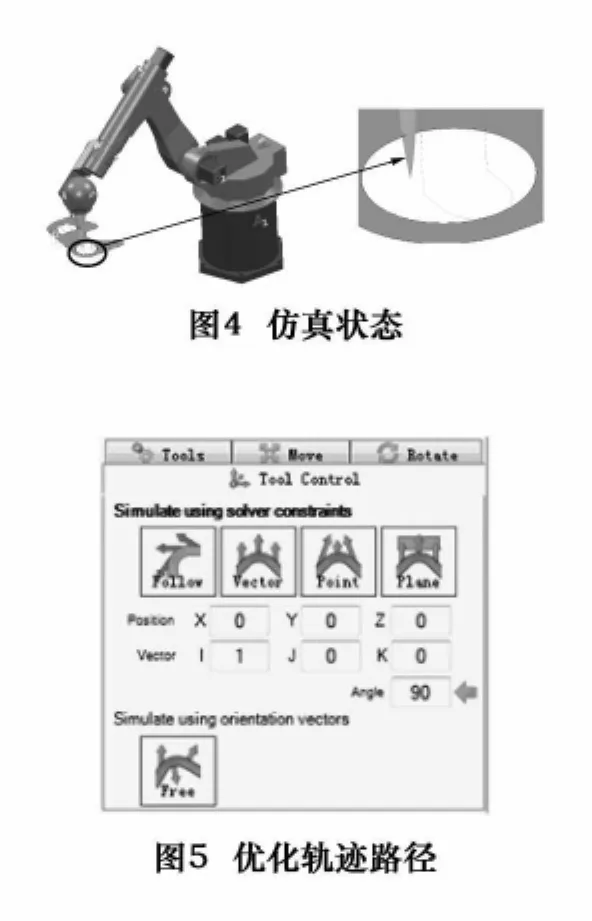
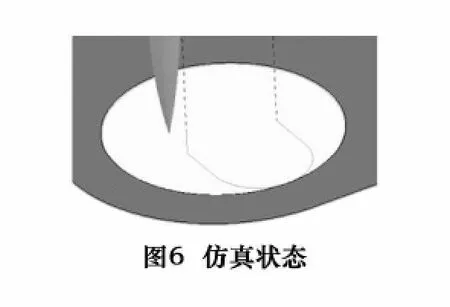
(6)優化軌跡路徑:選擇“follow”圖標,并設定相關矢量參數為1、0、0及角度為90°(見圖5)。再次按照上述第4步進行仿真。觀察仿真狀態,放大局部后見圖6,可以明顯看到“扁形”刀具已經和工件的輪廓完全相切,解決了之前的“過切”現象。

(7)記錄軌跡路徑到文件:點擊“回到起始點”按鈕,點擊“記錄仿真”按鈕,并根據彈出窗口存儲1個*.robsim文件到硬盤上。繼續上述第5步的過程進行仿真,仿真結束后點擊“停止按鈕”。
(8)轉換到Robot能夠識別的語言:按照圖7設置,并點擊“Write robot program”按鈕寫入。
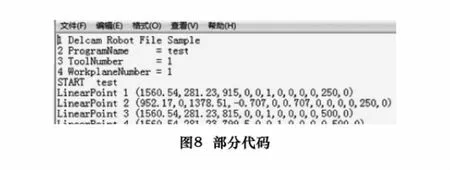
(9)檢視編譯后的語言并傳輸給Robot:用記事本打開得到的文件,內容如圖8(僅截取了部分代碼)。
鑒于篇幅所限,對于機器人運動軌跡路徑的編修優化還有許多沒有和大家分享,通過Delcam公司的PowerMILL Robot Interface編程系統可以非常便捷地對機器人程序進行離線編寫與優化。
PowerMILL Robot Interface的特點:
(1)軟件離線編程,編程更高效;軟件易學易用,具有人性化的操作界面;可控性極強的后編輯能力,容易優化各個軸的運動;可以使用標準化的模板進行編程、標準化的刀具庫管理系統,讓車間的管理更容易實現標準化。
(2)支持機器人定位換刀功能;支持機器人裝卸、搬運等定點運動功能、支持機器人弧焊和激光焊等焊接功能;支持機器人發泡取件、火焰切割、注塑取件及水刀切割等;支持機器人對復雜零件的銑削處理。
(3)離線編制的程序可以直接被機器人讀取采用。
(4)真實模擬實際工作環境。
Delcam的離線編程系統使得技術人員對工業機器人的控制變得輕而易舉,特有的離線和仿真技術幫助我們脫機編制優化的程序,減少現場驗證等待時間,減少出錯及不必要的風險,降低安全隱患。
猜你喜歡
兒童故事畫報·發現號趣味百科(2025年8期)2025-08-23 00:00:00
青少年科技創新報(2024年23期)2024-07-12 00:00:00
中學生天地(A版)(2022年10期)2022-11-23 06:42:50
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
少年文藝·我愛寫作文(2017年6期)2017-06-12 23:21:56
現代企業(2015年2期)2015-02-28 18:45:09