數控機床用磁懸浮系統自抗擾控制仿真研究*
2012-09-26 09:31:50劉春芳任修孟王麗梅
制造技術與機床 2012年4期
關鍵詞:系統
劉春芳 任修孟 王麗梅
(沈陽工業大學電氣工程學院,遼寧沈陽110870)
隨著磁懸浮技術的日益成熟及其在工業上的應用日益廣泛,將磁懸浮技術應用于數控機床中將成為可能。磁懸浮技術通過磁場力把移動部件浮起,采用直線電動機驅動部件運動。與傳統的機床相比,磁懸浮移動部件具有無機械摩擦、無接觸磨損和無需潤滑的優點。目前對這方面的研究有很多。文獻[1]基于反饋線性化方法,針對橫梁懸浮系統線性模型設計了PI狀態反饋控制器。文獻[2]針對龍門移動式數控機床在運行過程中參數攝動以及未建模動態參數可能對系統造成的影響,結合魯棒H∞理論的控制方案設計出自適應積分滑模控制器。文獻[3]對磁懸浮列車采用H∞狀態反饋設計控制器,抑制擾動使列車穩定懸浮。此外,模糊、神經網絡等先進控制策略也在磁懸浮控制器得到應用[4-5]。這些文獻都把模型先線性化,然后再設計控制器,因而不可避免地帶來了一些原始誤差。本文針對磁懸浮系統非線性模型進行控制器設計,避免了線性化帶來的模型誤差。
自抗擾控制方法是韓京清教授在非線性PID控制律的基礎上提出發展起來的一種新型非線性控制算法。它利用非線性跟蹤-微分器安排過渡過程,通過擴張狀態觀測器實時估計出系統內外的綜合擾動,并予以前饋補償,此外還結合非線性反饋結構進一步提高控制性能。該技術具有超調小,動態響應快,精度高,抗干擾能力強及算法簡單等眾多優點[6-7]。
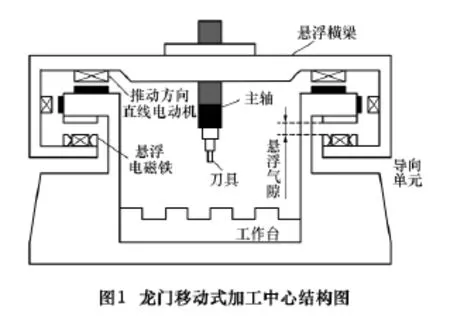
龍門移動式加工中心結構[8-9]如圖1所示。龍門移動式數控機床橫梁懸浮系統是一個典型的非線性不穩定系統。由于其自身的機械和電氣特性很難獲得精確的數學模型,懸浮控制系統必須保證在模型不精確和各種外部干擾的情況下,提供良好的懸浮性能。自抗擾控制技術將系統的未建模動態和未知擾動都歸結為系統的總擾動而進行估計并給予補償,既能使控制器對系統的外部干擾和內部參數變化表現出較強的抗擾動能力,又能克服系統模型的不精確性對控制器設計造成的影響。因此本文采用自抗擾控制技術對懸浮氣隙進行控制。
1 橫梁磁懸浮系統
1.1 數學模型
龍門移動式數控機床中的懸浮系統,其懸浮為兩端同步懸浮,要求保證懸浮的同步性、穩定性和精確性。而本文主要對單電磁懸浮系統給予控制,保證懸浮的精確度和穩定性。在建立模型時,忽略漏磁通的影響和電磁鐵與導軌中的電阻,認為磁動勢均勻分布在氣隙上,并且電磁鐵只在垂直方向上運動。由文獻[1]和[2]得單電磁懸浮系統的數學模型為
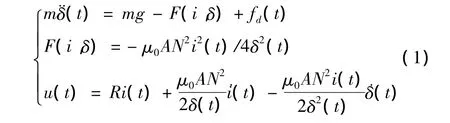
式中:δ(t)為懸浮間隙;F(i,δ)為電磁鐵的電磁吸力;m為懸浮橫梁的質量;fd(t)為外部干擾;i(t)為控制線圈的電流;u(t)為控制線圈兩端的電壓;φm為氣隙磁通;φ1為漏磁通;g為重力加速度;μ0為真空磁導率;A為鐵芯面積;N為電磁鐵繞組匝數;R為電感等效電阻。
1.2 系統非線性狀態方程
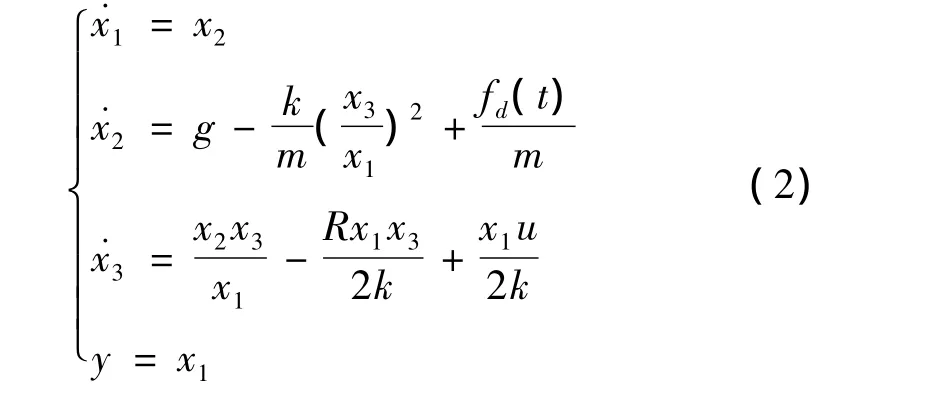
選取狀態變量x1=δ,x2=˙δ,x3=i,選擇輸出y=δ=x1,令 k=μ0N2A/4,根據系統的數學模型(1),得到系統的非線性狀態方程為:
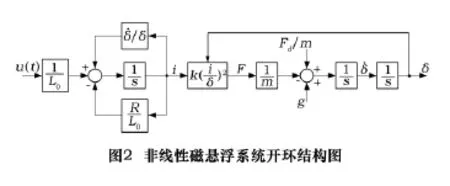
設L0=μ0N2A/2δ,非線性磁懸浮系統的開環結構如圖2所示。
2 自抗擾控制器設計
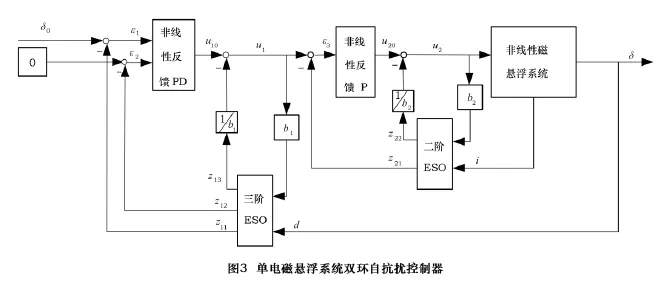
典型自抗擾控制器由跟蹤微分器(TD)、擴張狀態觀測器(ESO)和非線性狀態誤差反饋控制律(NLSEF)3部分組合而成。本文根據自抗擾控制器的典型結構在非線性狀態方程(2)基礎上設計一階電流環和二階位置環的雙環自抗擾控制器,如圖3所示。電流環的作用是加快電流響應速度,使控制量盡可能快地作用到控制對象上,位置環的作用是穩定系統并使其達到預定的控制精度。δ0為系統懸浮氣隙給定,δ為實際懸浮氣隙輸出。
2.1 電流環控制器設計
橫梁懸浮系統工作時,電磁鐵發熱嚴重,導致電感和電阻值變化,系統模型參數變化,擴張狀態觀測器將這些內部參數變化和外部擾動歸結為總擾動進行估計并給予補償,得到更好的控制效果。控制器形式如下。
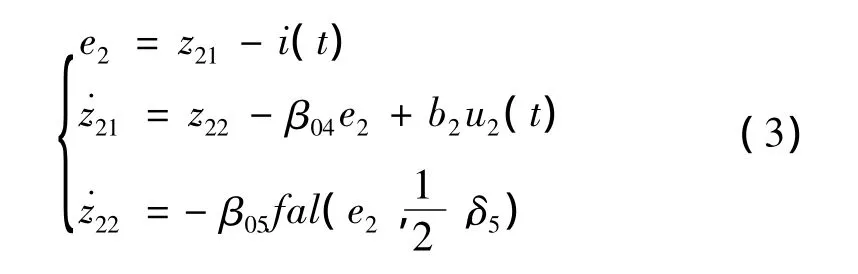
二階擴張狀態觀測器:
非線性反饋P:
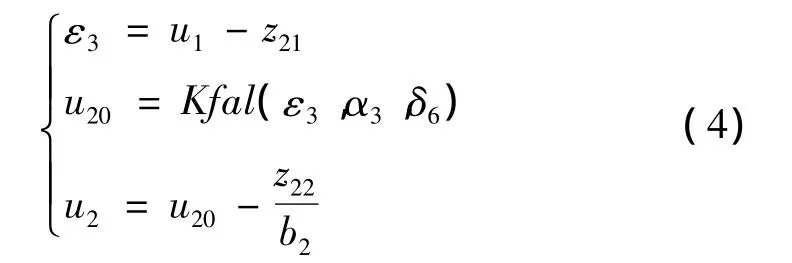
β04、β05、δ5為二階擴張狀態觀測器參數,K、α3、δ6為非線性反饋P的參數,b2是與系統模型有關的參數,e2為電流環控制器中二階擴張狀態觀測器估計的電流與系統輸出電流間的誤差。
2.2 位置環控制器設計
在設計位置環控制器時,將電流環看成直通,進行設計。由于給定是常值,可以不安排過渡過程,給定的導數為零,在系統仿真時用常數零給定。設計的控制器如下。
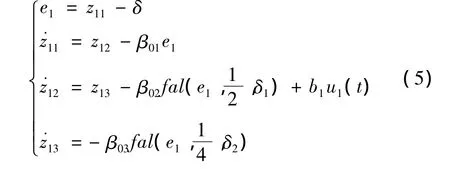
三階擴張狀態觀測器:
非線性反饋PD:
在以上式中,非線性函數 fal(ε,α,δ)為:

式(5)中,β01、β02、β03、δ1、δ2為三階擴張狀態觀測器參數,e1為位置環控制器中三階擴張狀態監測器估計的懸浮氣隙與系統輸出懸浮氣隙間的誤差。式(6)中,Kp、Kd、α1、α2、δ3、δ4為非線性反饋 PD 的參數。參數b1與電流環控制器中的b2一樣,是與被控對象有關的參數,也是擴張狀態觀測器和擾動補償共用的參數,它們對系統性能起很重要的作用,決定控制系統抗擾動范圍。
2.3 參數整定
對于位置環非線性擴張狀態觀測器中參數β01、β02、β03來說,β01在一定范圍內增大對系統控制品質并無較大影響,當β01過大時容易引起發散振蕩,過小時系統整體的跟蹤效果變差;β02的過大會產生高頻噪聲信號,導致系統控制品質惡化,過小會使振蕩次數增加,振蕩幅度加大;β03過大時,系統的跟蹤速度加快,但容易引起振蕩,過小時系統的跟蹤速度減慢,過渡過程趨于平穩,不易引起振蕩,但容易引起較大的相位滯后,甚至跟蹤不上。
對于非線性反饋PD中參數 Kp、Kd來說,Kp過大時,振蕩次數增加,過小時跟蹤速度變慢;當Kp和Kd越大,系統的響應速度越快,但過大就會造成輸出超調。
對于電流環一階自抗擾控制器的參數與位置環二階自抗擾控制器中對應的參數對系統的影響類似。
控制器其他參數根據經驗取值,對于參數b1和b2來說,采用試湊法確定。
3 系統仿真
為了實現龍門移動式數控機床高加工精度的目標,將橫梁懸浮起來徹底消除摩擦,要求橫梁在任何情況下都能穩定地懸浮在1.6 mm高度,并在有內外各種擾動影響的情況下具有很強的魯棒性。根據上面所設計的控制器,利用仿真軟件MATLAB/Simulink進行仿真[10]。
龍門移動式數控機床橫梁懸浮系統參數為:懸浮橫梁質量m=600 kg,鐵芯面積A=0.65×0.03 m2,電磁鐵繞組匝數N=380,電阻R=1 Ω,期望懸浮間隙δ0=1.6 mm。
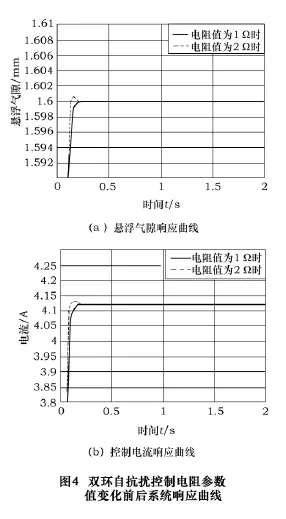
對于橫梁懸浮系統工作時,內部參數變化主要是電磁鐵電感電阻的變化。圖4為自抗擾控制時電阻變化前后的系統響應輸出曲線。從圖中看出,電阻為1 Ω時系統響應曲線幾乎無超調,橫梁穩定懸浮在1.6 mm處;電阻由1 Ω變成2 Ω后,懸浮氣隙和控制電流曲線有微超調外,和電阻為1 Ω時的響應曲線幾乎重合,說明自抗擾控制器對系統內部參數變化有較強的抗擾動能力。
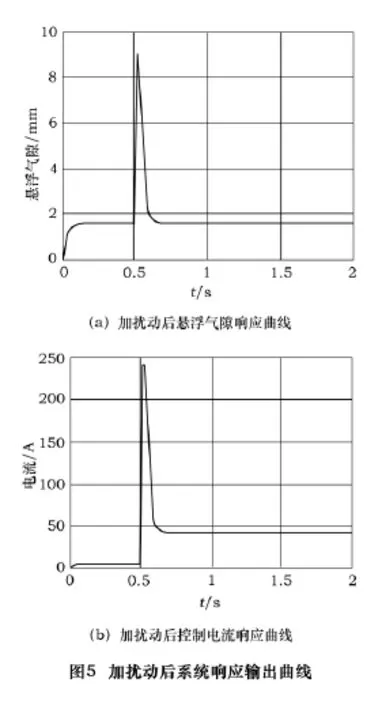
橫梁懸浮系統工作時,外部擾動來源主要是加工工件過程中對懸浮橫梁產生的干擾力。圖5為在t=0.5 s時加103N擾動的系統響應輸出曲線。在t=0.5 s時加擾動,原平衡被打破,懸浮氣隙變大,控制器根據檢測的氣隙信號增大電磁鐵電壓來增大電磁力,減小氣隙,電壓變大伴隨電流變大。從圖5中看出,氣隙與電流劇變后在0.2 s內又恢復穩定,懸浮氣隙穩定在1.6 mm處,電流達到新的平衡點并保持穩定,證明控制系統具有抗擾動能力。
4 結語
本文在龍門移動式數控機床中引入磁懸浮技術徹底消除摩擦,并針對橫梁懸浮系統建模不精確及外部干擾和內部參數變化時可能對系統造成的影響,采用自抗擾控制技術,通過擴張狀態觀測器將系統建模不精確和內外未知擾動作用都歸結為對系統的總擾動而進行估計并給予補償。仿真結果表明,自抗擾控制器控制磁懸浮系統輸出微超調,動態響應速度快,對系統內部參數變化和大擾動具有強魯棒性。
[1]王麗梅,石佳.龍門移動式數控機床橫梁磁懸浮控制系統研究[J].制造技術與機床,2008(2):79-82.
[2]劉春芳,安明偉,王麗梅.移動式數控機床橫梁磁浮系統的滑模-H∞控制[J].沈陽工業大學學報,2010,32(4):443 -448.
[3]孟范偉,何聯,王毅,等.磁懸浮系統的H∞狀態反饋設計[J].電機與控制學報,2009,13(2):282 -286.
[4]張靜,姚小偉,武俊峰.磁懸浮系統的模糊控制研究[J].哈爾濱理工大學學報,2006,11(6):1 -4.
[5]許杰,劉春生.基于神經網絡的磁懸浮球自適應控制器[J].機電工程,2007,24(3):22 -24.
[6]韓京清.自抗擾控制技術[M].北京:國防工業出版社,2008.
[7]夏長亮,俞衛,李志強.永磁無刷直流電機轉矩波動的自抗擾控制[J].中國電機工程學報,2006,26(24):137 -142.
[8]劉春芳,遲青光,郭慶鼎.機床橫梁懸浮系統的動態積分滑膜變結構控制器的設計[J].制造技術與機床,2011(2):73-76.
[9]劉春芳,安明偉,王麗梅.加工中心龍門磁懸浮高度的滑膜-H∞控制[J].制造技術與機床,2010(1):79 -83.
[10]王兵樹,姜萍,林永君,等.SIMULINK中自抗擾控制技術自定義模塊庫的創建[J].系統仿真學報,2010,22(3):610 -615.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
