西門子802D控制器參數(shù)優(yōu)化技術(shù)研究
2012-10-23 10:04:00吳響亮曹文智馬曉波
制造技術(shù)與機(jī)床 2012年4期
吳響亮 曹文智 馬曉波
(沈陽機(jī)床(集團(tuán))設(shè)計(jì)研究院有限公司,遼寧 沈陽 110142)
現(xiàn)代數(shù)控機(jī)床正在向著高精度、高速度方向發(fā)展,以適應(yīng)生產(chǎn)的需要。對(duì)于包含驅(qū)動(dòng)和伺服電動(dòng)機(jī)的整套數(shù)控系統(tǒng)來說,其最根本的任務(wù)就是對(duì)運(yùn)動(dòng)的控制,這一任務(wù)是由其作為控制器的功能來實(shí)現(xiàn)的[3]。對(duì)于控制器來說,其優(yōu)化過程是控制器設(shè)計(jì)的重要組成部分,用來提高控制系統(tǒng)的響應(yīng)速度和跟隨精度。對(duì)于數(shù)控系統(tǒng)來說,其控制器的優(yōu)化是根據(jù)機(jī)床的情況而進(jìn)行的,所以此優(yōu)化過程只能而且必須作為機(jī)床調(diào)試的一個(gè)環(huán)節(jié)。
一般在機(jī)床具體調(diào)試時(shí)系統(tǒng)會(huì)給定對(duì)應(yīng)軸的默認(rèn)參數(shù),但這些參數(shù)一般是為保證系統(tǒng)正常運(yùn)行而比較保守,不能完全滿足加工要求,而控制器參數(shù)優(yōu)化技術(shù)正是在現(xiàn)有的基礎(chǔ)上盡可能地提高系統(tǒng)的動(dòng)態(tài)性能。數(shù)控系統(tǒng)也正是通過將采樣的實(shí)際值(電流、速度、位置等)和設(shè)定值進(jìn)行數(shù)字化的處理(例如快速傅里葉變換)反映出系統(tǒng)的特性,這樣我們才能對(duì)控制器參數(shù)進(jìn)行參數(shù)優(yōu)化,以保證系統(tǒng)在穩(wěn)定的前提下有更好的輸出。
1 優(yōu)化過程
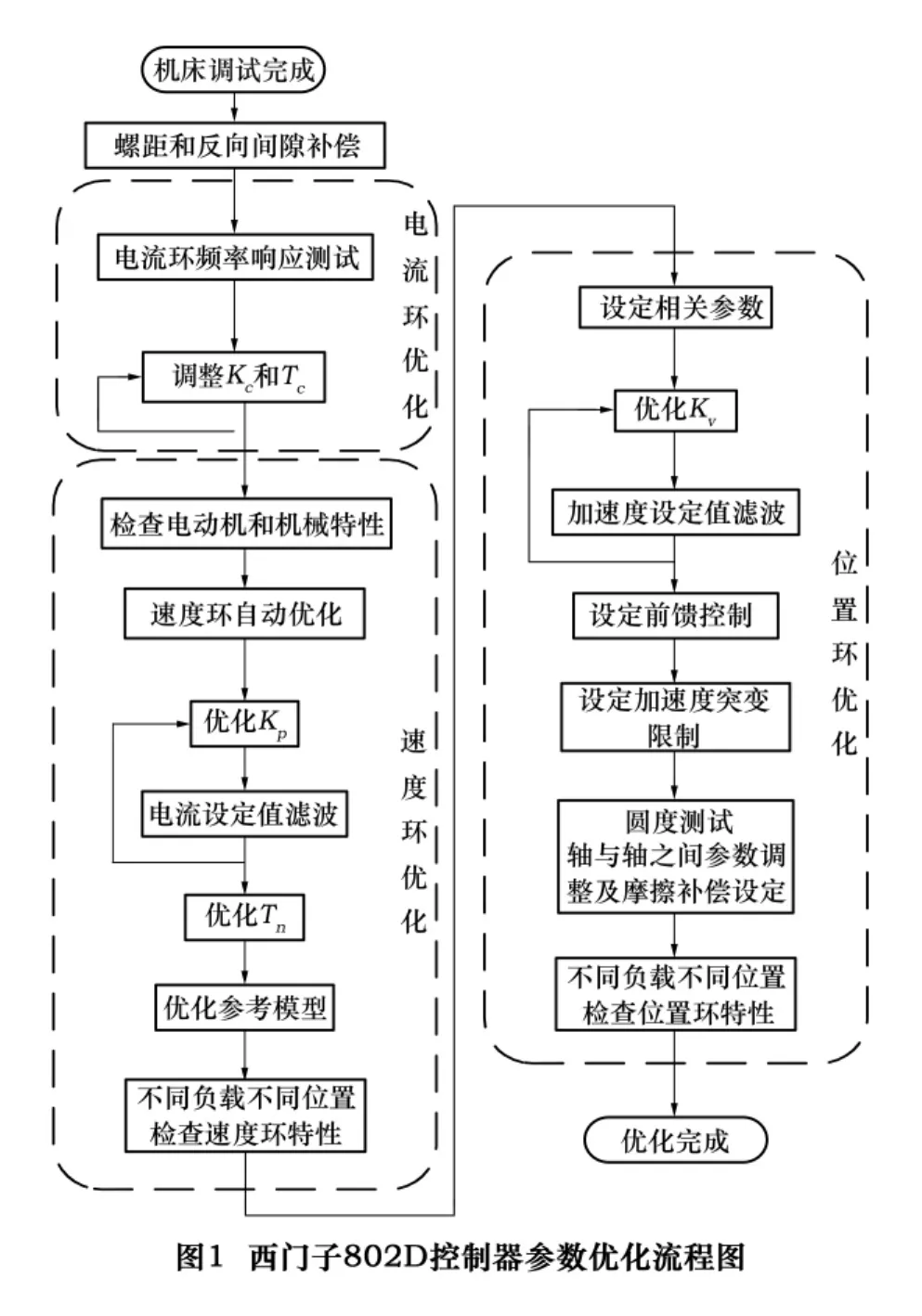
控制器參數(shù)優(yōu)化主要依據(jù)頻率特性測(cè)試、階躍響應(yīng)測(cè)試和擾動(dòng)階躍響應(yīng)測(cè)試等。圖1給出了西門子802D控制器參數(shù)優(yōu)化流程圖。
1.1 電流環(huán)優(yōu)化
對(duì)于電流環(huán)的優(yōu)化一般只是觀察它的狀態(tài),因?yàn)閷?duì)于使用西門子的驅(qū)動(dòng)器和電動(dòng)機(jī)的控制系統(tǒng)來說,電流環(huán)在出廠的時(shí)候就已經(jīng)做了很好的優(yōu)化。電動(dòng)機(jī)驅(qū)動(dòng)配置好后,會(huì)自動(dòng)給出優(yōu)化后的電流控制器參數(shù)[1]。通過觀察可以幫助我們檢測(cè)驅(qū)動(dòng)器或電動(dòng)機(jī)配置是否正確。測(cè)量參數(shù)的設(shè)定主要是對(duì)輸入信號(hào)和測(cè)量要求的設(shè)定。對(duì)于輸入信號(hào)要根據(jù)系統(tǒng)的情況來定,信號(hào)太強(qiáng)可能損壞系統(tǒng),信號(hào)太弱可能干擾比較大,所以有時(shí)候需要反復(fù)比較來選擇合適的數(shù)值,如果出來的波形和應(yīng)該出現(xiàn)的波形有明顯差距,要檢查測(cè)量參數(shù)是否正確。
1.2 速度環(huán)優(yōu)化
速度環(huán)是驅(qū)動(dòng)器核心,電流環(huán)是速度環(huán)的最內(nèi)環(huán)。速度環(huán)的優(yōu)化涉及速度環(huán)增益、積分時(shí)間、設(shè)定值濾波和參考模型等。西門子802D自帶優(yōu)化軟件IBN Tool提供兩種速度優(yōu)環(huán)化方法,一種為自動(dòng)優(yōu)化,一種為手動(dòng)優(yōu)化。
1.2.1 自動(dòng)優(yōu)化
IBN Tool提供自動(dòng)優(yōu)化功能,可以對(duì)比例增益(Kp:P1460)、積分時(shí)間常數(shù)(Tn:P1462)及電流設(shè)定值濾波進(jìn)行自動(dòng)優(yōu)化,并生成特性圖供檢查,能滿足一般要求。但自動(dòng)優(yōu)化功能不提供對(duì)參考模型的設(shè)定,有3種優(yōu)化方案可供選擇:標(biāo)準(zhǔn)、較好動(dòng)態(tài)性(Kp最大)和較好阻尼(Kp最小)。優(yōu)化完成后,自動(dòng)將得到優(yōu)化的數(shù)據(jù)寫入系統(tǒng),系統(tǒng)再自動(dòng)進(jìn)行速度環(huán)測(cè)量[1]。
1.2.2 手動(dòng)優(yōu)化
在進(jìn)行手動(dòng)優(yōu)化時(shí),可以先設(shè)定較大的Tn(比如300 ms),先對(duì)Kp進(jìn)行優(yōu)化,Kp優(yōu)化完成后再對(duì)Tn進(jìn)行優(yōu)化。通過頻率響應(yīng)測(cè)試來調(diào)整Kp,頻率特性通過Bode圖來表示。對(duì)于速度環(huán),希望Bode圖中幅頻特性曲線的帶寬盡可能高,這樣系統(tǒng)的響應(yīng)速度就會(huì)加快。增大Kp值就可以獲得這樣的效果,但隨著Kp值增大,一般要求超出部分最高點(diǎn)不超過3 db(相當(dāng)于在時(shí)域中40%超調(diào)),并且可能會(huì)出現(xiàn)幅頻特性曲線中帶寬頻率之后原本在0 db線下的尖峰超過0 db;這樣的尖峰如果超過3 db系統(tǒng)就可能出現(xiàn)共振,如果想繼續(xù)增大Kp就需要使用帶阻形式的電流濾波器將這個(gè)尖峰濾掉。
積分控制是對(duì)誤差信號(hào)進(jìn)行累積,它會(huì)消除系統(tǒng)穩(wěn)態(tài)誤差,提高系統(tǒng)抗擾動(dòng)能力。較小的Tn值會(huì)使Bode圖幅頻特性曲線的低頻段更接近0 db線,但隨著Tn減小,幅頻特性曲線拐點(diǎn)附近會(huì)向上移動(dòng),一般情況,Tn在2~20 ms之間調(diào)整。
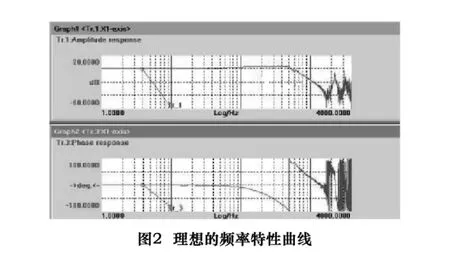
優(yōu)化完Kp和Tn后的Bode圖應(yīng)該是帶寬頻率盡可能高,帶寬頻率之前的幅頻特性曲線最高不超過3 db。但是為了更精細(xì)的調(diào)整,還需要通過階躍響應(yīng)來檢驗(yàn)已經(jīng)確定的參數(shù)。優(yōu)化后比較理想的頻率特性曲線如圖2所示。
1.3 位置環(huán)優(yōu)化
位置環(huán)控制是NC控制器的核心,加工程序經(jīng)插補(bǔ)運(yùn)算后得到目標(biāo)位置和位移速度,再經(jīng)精插補(bǔ)得到目標(biāo)位置、目標(biāo)加速度和目標(biāo)轉(zhuǎn)速,最后生成加速度、速度和位置設(shè)定值。位置環(huán)采用比例控制,其中主要參數(shù)是位置環(huán)增益Kv,保證對(duì)設(shè)定值變化和干擾有轉(zhuǎn)好的響應(yīng),主要體現(xiàn)在跟隨誤差和輪廓誤差小,穩(wěn)定性好。位置環(huán)優(yōu)化主要通過頻率特性測(cè)試來調(diào)整Kv,做到在階躍響應(yīng)不出現(xiàn)超調(diào)的情況下,盡量增大Kv,用以提高帶寬,提高系統(tǒng)動(dòng)態(tài)特性[3]。
調(diào)整Kv后,要通過伺服跟蹤曲線來檢驗(yàn)Kv值是否合理。一般情況下通過NC程序讓伺服軸跟蹤一段方波序列信號(hào)。如果在測(cè)試時(shí)跟蹤曲線出現(xiàn)振蕩,可以降低加速度限制值。
2 圓度測(cè)試
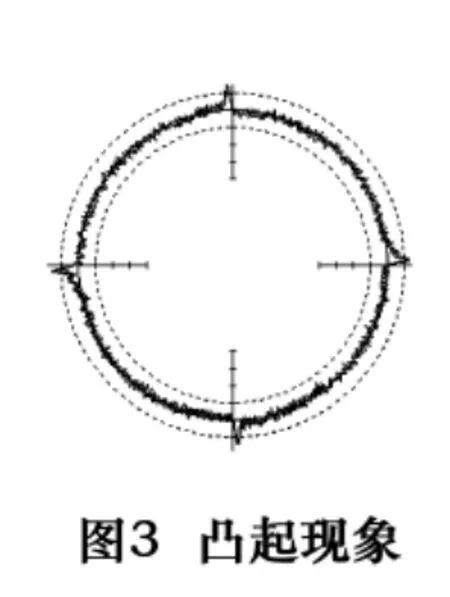
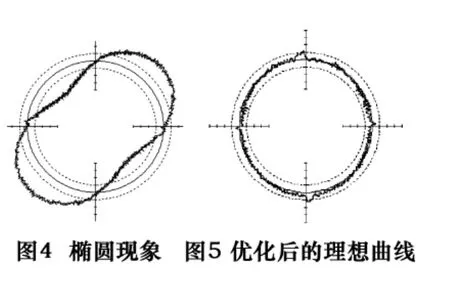
單軸優(yōu)化后用圓測(cè)試來檢驗(yàn)2個(gè)軸的插補(bǔ)精度,希望輪廓誤差越小越好。圓測(cè)試中在過換象限點(diǎn)時(shí)有凸起和兩軸速度不匹配等問題。如圖3所示,在4個(gè)過象限點(diǎn)出現(xiàn)凸起現(xiàn)象,這是因?yàn)楫?dāng)有一個(gè)軸的速度由0開始加速,但由于摩擦的存在,造成加速滯后而形成了過象限點(diǎn)的凸起。可以用摩擦補(bǔ)償(MD32500,MD32520,MD32540)來彌補(bǔ),補(bǔ)償?shù)脑砭褪窃谳S換向時(shí)提前加一個(gè)速度信號(hào)來彌補(bǔ)這種滯后[2]。如果參與圓插補(bǔ)的每個(gè)軸實(shí)際增益不一致,會(huì)導(dǎo)致加工結(jié)果為橢圓,如圖4所示,這種情況應(yīng)該調(diào)整各軸增益(MD32200)和加速度(MD32300)。另外對(duì)于速度不匹配問題,可以使用西門子動(dòng)態(tài)時(shí)間匹配功能,它的基本原理是在速度較快的軸上設(shè)置動(dòng)態(tài)時(shí)間匹配參數(shù),這樣,數(shù)控系統(tǒng)就會(huì)根據(jù)這個(gè)參數(shù)適當(dāng)降低該軸的速度,使之與另一個(gè)軸的速度相匹配[1]。
經(jīng)上述流程優(yōu)化后的結(jié)果如圖5所示。
[1]Doc On CD[Z].Siemens,2009.
[2]802D SL 簡(jiǎn)明調(diào)試手冊(cè)[Z].Siemens,2005.
[3]白恩遠(yuǎn),王俊元,孫愛國.現(xiàn)代數(shù)控機(jī)床伺服及檢測(cè)技術(shù)[M].北京:國防工業(yè)出版社,2005.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
