基于三維地形可視化的GPS控制網布設
2012-09-22 10:29:54田文波余代俊林志鵬
城市勘測 2012年6期
田文波,余代俊,林志鵬
(成都理工大學地球科學學院,四川成都 610059)
1 引言
近年來GPS技術不斷發展完善,已經大量應用于大地測量、工程測量以及變形監測等領域。GPS技術也因其全球性、全天候、精度高、測站間無須通視等特點漸漸取代傳統控制測量方法,廣泛應用于平面控制網的布設。在GPS控制測量中,首先要根據布網原則進行控制點選點。控制點的選取直接影響GPS控制網的網形及精度。
在進行選點之前,需要收集整個測區的相關資料,然后根據點位選擇的要求進行野外踏勘選點。在對項目區域不熟悉的情況下進行選點有一定的盲目性,可以先建立整個地區的三維地面模型,在圖像上直觀的進行控制網布設,然后進行野外實地勘察,調整GPS點位和控制網網形,最后完成整個控制網的布設。
本文結合工程實例,主要論述利用遙感的三維地形可視化及漫游進行GPS控制點的選定及控制網的布設。
2 研究區概況、數據源
2.1 研究區概況
本次試驗選擇新疆某地區為研究區域,試驗區域內包括河流、山地、沖積平原等復雜地貌。氣候條件屬于半干旱大陸性氣候。
2.2 數據源
(1)Landset7 ETM+影像數據,Geotiff數據格式,獲取時間為2010年,1~5以及第7波段空間分辨率30 m,第6波段和第8波段分別為60 m和15 m,采用多影像局部自適應回歸分析模型進行條帶修復。
(2)ASTER數字高程數據,IMG數據格式,空間分辨率30 m。
(3)1∶10000比例尺地質地形圖。
(4)測區主要道路交通圖以及普通地圖等測區資料。
3 數據準備
3.1 遙感圖像的幾何校正
本次試驗選取的圖像獲取時間為2010年9月,此時研究區正處在初秋季節,上空云量較少。進行控制網選點時只需觀察所選控制點周圍大體的地形情況,所以不太需要進行圖像輻射校正。由于受遙感平臺、地形起伏、地球表面曲率以及大氣折射等因素的影響,遙感影像會發生扭曲、平移、縮放等變形,導致圖像像元空間位置與實地位置信息不符,影響控制點選取的準確性,所以必須進行幾何校正。本次試驗使用Arc-GIS的Georeferncing工具條進行圖像配準。通過對照已有的1∶10000比例尺地質地形圖,在需要配準的影響上選取易識別的控制點,控制點點位要均勻分布,然后輸入其實際坐標進行校正。
3.2 圖像裁剪
本次項目區域面積為一矩形,南北長15 km,東西長10 km。需要將項目區域從整幅影像中裁剪出來,裁剪范圍應略大于項目區域面積。ArcGIS的Arctoolbox中提供了多種數據提取方法,可以使用任意形狀的區域進行裁剪,本次試驗使用同一矩形區域分別對影像數據和高程數據進行裁剪。裁剪后的影像如圖1所示。

圖1 裁剪后影像
3.3 圖像矢量化
將裁剪之后的遙感影像導入ERDAS IMAGINE二維窗口中。對照已有地圖資料以及高分辨率谷歌地圖對測區中的道路、河流以及村莊等進行矢量化,并保存線條樣式等配置信息,顏色最好選用亮色調以便與周圍地物區分。然后編輯村莊、道路、水系名稱等,添加文字和數字信息到注記圖層中。因為需要將DEM數據、遙感影像、矢量圖形以及注記等多重數據進行集成,所以以上所有數據必須有相同的地理參考。要修改矢量文件以及注記文件的屬性,確定其單位類型為map,單位是m。矢量化后的二維影像如圖2所示。

圖2 矢量化之后的影像
4 三維漫游及控制網布設
4.1 三維漫游
圖像的三維漫游及可視化需要在ERDAS IMAGINE的Virtual GIS模塊中進行。先建立或打開Virtual GIS工程文件,然后加載DEM數據、裁剪后的影像、矢量數據以及注記數據等。為了更好地查看區域內的三維地形變化,Virtual GIS模塊提供了5種不同的航行模式。其中定位導航模式以及目標導航模式可以靜態的查看圖像內的任何區域。控制板導航模式提供飛行控制器,使觀測者從不同的位置和角度俯瞰整個區域。地形導航模式則是沿著地表運行,通過改變觀測方向以及行進方向了解周圍三維地形。以上4種模式都支持漫游,最后一種選擇導航模式用以矢量、注記以及柵格數據的空間查詢,并不支持漫游。
Virtual GIS模塊還提供三維環境飛行功能,飛行路線的選擇有兩種,一是在二維視窗中直接數字化,另外一種是直接添加三維坐標作為飛行路線,兩種方式的飛行路線都可以保存。在對飛行高度以及飛行線路特性進行設置之后,就可以開始飛行操作,并且在飛行過程中進行三維飛行記錄,將整個飛行過程保存為一段三維動畫。
由于在進行GPS控制點野外選點時一般需要沿道路行車勘察,所以可以將道路作為三維飛行線路的一部分,并需要設置合適的飛行高度。三維漫游局部如圖3所示.
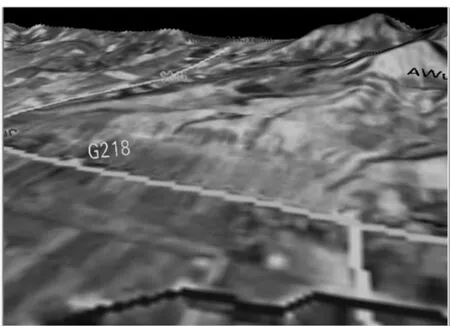
圖3 三維漫游局部圖
4.2 點位選定及控制網布設
經過以上幾種導航模式三維漫游以及虛擬三維飛行之后,已經可以了解整個區域內的地形地貌以及道路交通等基本情況,根據項目設計要求,確定GPS點位的個數及大體區域。其中GPS選點要求如下:
(1)點位選擇應符合技術設計要求,并有利于其他測量手段進行擴展和聯測;
(2)點位的基礎應堅實穩定,易于長期保存,并有利于安全作業;
(3)點位應便于安置接收設備和操作,視野應開闊,被測衛星的地平高度角應大于15°;
(4)點位應遠離大功率無線電發射源(如電視臺、微波站等),其距離不得小于200 m,并遠離高壓輸電線,其距離不得小于50 m;
(5)附近不能有強烈干擾接收衛星信號的物體;
(6)交通應便于作業;
(7)應充分利用符合以上要求的舊有控制點及其標石和覘標。
本次項目要求整個控制網的平面精度達到國家E級GPS網的要求,高程控制通過GPS高程擬合達到五等水準高程測量精度。按技術要求以及GPS選點規范,在整個圖像區域內選定6個GPS控制點大體位置。現場踏勘時根據實地情況對控制點位置進行微調,如存在圖像分辨率限制無法在圖像上顯示的控制點周圍干擾衛星信號的物體。
根據任務要求,在圖像上設計一個圖形結構及點位分布較好的網形,將控制點坐標導入南方CASS軟件中,查看控制網的精度與可靠性,為野外選點提供方便,使選點工作更加條理,設計好的網形再通過實地踏勘確定其實際性及最終位置。最后確定GPS控制網如圖4所示。
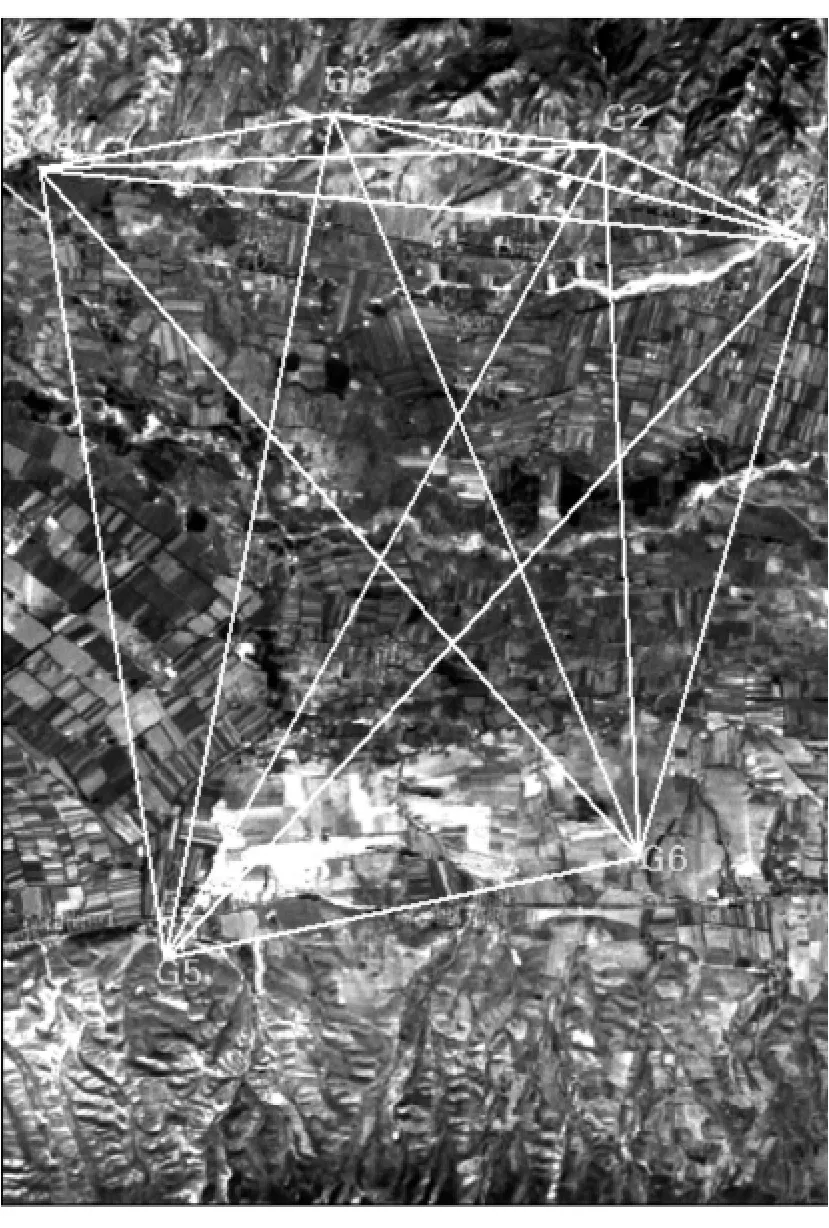
圖4 遙感圖像上GPS控制網
按照國家標準《全球定位系統(GPS)測量規范》(GB/T18314-2001)中GPS控制網測量精度的相關規定,對基線進行解算。基線解算過程中,每條基線滿足:基線方差比Ratio≥3;基線固定誤差≤10;RMS<0.02。
該項目解算所有基線均合格。其中,所有基線均優于1/7.9萬,最佳為1/126萬。
遵照規范相關精度規定,對基線的觀測質量進行檢驗。該項目取 a≤10 mm,b≤20 ppm,D=4.21 km(平均基線邊長),由基線標準差公式得出σ=84.79 mm。
本次觀測的閉合環檢驗中同步環最大相對誤差1.44 ppm,最小 0.88 ppm,誤差限制為 15.00 ppm,符合同步環的閉合差指標;異步環最大相對誤差2.95 ppm,最小 0.92 ppm,誤差限制為 25.50 ppm,同樣符合異步環的閉合差指標。
5 結論
數字三維地形可視化的應用很廣泛,用以輔助GPS控制網布設只是一個方面。隨著遙感圖像以及高程數據的免費獲取,可以更好地與GPS測量結合。在遙感影像上進行GPS控制網初步布設,可以大體計算基線長度是否滿足精度要求等,同時可以有效提高野外踏勘選點的效率和精確度,可以滿足低等級GPS控制網的布設。為了提高點位的準確性,應盡量選用分辨率高的遙感影像和高程數據,如Quick Bird或IKONOS影像等,并結合其他資料綜合處理。在圖像進行控制點選取只是起到輔助作用,點位的最終確定進行野外實地踏勘是必不可少的。
[1]賀英魁,羅強.GPS測量技術[M].重慶:重慶大學出版社,2010.
[2]彭芳媛,向常淦.基于ERDAS的三維地形可視化及漫游制作[J].測繪,2010,33(4):165~167.
[3]黨安榮,王曉棟,陳曉峰等.ERDAS IMAGINE遙感圖像處理方法[M].北京:清華大學出版社,2003.
[4]劉瑞敏,李華,王思鍇等.基于Google Earth的地鐵亦莊線 GPS控制網布設[J].測繪通報,2008,11:47~49.
[5]GB/T13814-2001.全球定位系統(GPS)測量規范[S].
[6]CJJ73-97.全球定位系統城市測量技術規范[S].
[7]徐杰,孟黎,唐詩華等.控制網選點系統的研究[J].測繪與空間地理信息,2008,31(1):158 ~161.
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電測與儀表(2015年5期)2015-04-09 11:30:52
