波浪影響下導管架調平系統最優控制
2012-09-20 05:49:56房曉明姜沛然王立權弓海霞王影
電機與控制學報 2012年11期
關鍵詞:系統
房曉明, 姜沛然, 王立權, 弓海霞, 王影
(1.哈爾濱工程大學機電工程學院,黑龍江哈爾濱 150001;2.哈爾濱東安發動機(集團)有限公司,黑龍江哈爾濱 150066)
0 引言
目前,近海海上油田開發應用最廣泛的一種平臺結構類型是鋼制導管架平臺。該類平臺由導管架、鋼管樁和平臺上部結構組成。導管架作為平臺的基礎,先在陸上預制,然后通過駁船拖運或水中浮拖至安裝現場就位,經過打樁、調平和灌漿后導管架被安裝固定在海床上。平臺上部結構直接安裝在導管架頂部,包括:所有生產設備、生活設施和直升飛機平臺等安全設施,可用來鉆井和采油。
導管架在安裝過程中調平是整個安裝過程中最重要的一個環節,其精度直接影響到平臺的安全性、適應性、使用壽命等各種性能。在較深水域作業時,依靠海底整平、調整打樁順序和使用過渡段技術等都很難達到平臺上部結構的安裝精度要求。由于風、浪以及作業船舶性能對調平作業效果影響很大。導管架安裝后的水平度,需要使用導管架調平系統來完成[1-3]。
目前國內外進行導管架的調平作業是使用調平器分別對導管架4個邊角樁腿進行獨立調整,重復操作調整不同樁腿,直至導管架符合水平度要求。傳統的調平方式盡管比較成熟,但由于沒有完整而準確的調平控制系統,存在以下弊端:1)分別對4個樁腿進行調平作業,每個樁腿需要反復調整多次,調平作業效率低;2)每次單獨調整一個樁腿,無法體現統一的調平策略和目標,調平精度和效果不易控制;3)單獨調平某個樁腿,另外的樁腿可能會出現失載或過載狀態,導致導管架的大部分重量由一個調平器承擔,使調平器承載過大,對調平系統力學性能增加了更嚴格的要求;4)深水導管架受隨機波浪載荷影響動力響應復雜,調平作業不易控制;5)不能形成一套統一的調平控制方法,對同一導管架有不同的調整方案,人為因素較大[4-6]。
波浪影響下的導管架調平系統屬于典型的復雜高階非線性系統,本文針對4樁腿式導管架提出了基于Mamdani模糊系統的液壓自動調平的最優控制算法,利用模糊控制理論對安裝在4個樁腿上的4組調平液壓系統進行同時控制,制定出調平策略,不需建立調平系統的準確模型,對非線性調平系統有良好的控制效果。
1 調平系統結構及幾何模型
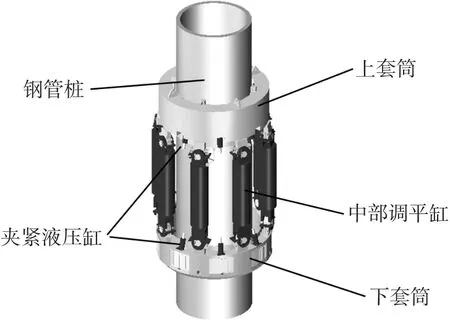
圖1 調平器結構示意圖Fig.1 Structure of leveling device
導管架調平器的主體機械結構主要由上套筒、下套筒以及中部調平機構3部分組成,如圖1所示。上套筒內部裝有向內夾持機構,8個液壓缸伸出時使夾爪夾緊鋼管樁,下套筒外部裝有外脹夾持機構,驅動夾爪向外脹緊套筒進而與導管架腿部連接,中部調平機構包括8個調平液壓缸,通過調整8個調平液壓缸的伸縮調整導管架樁腿高度,達到導管架調平目的。
調平系統的幾何模型如圖2所示。
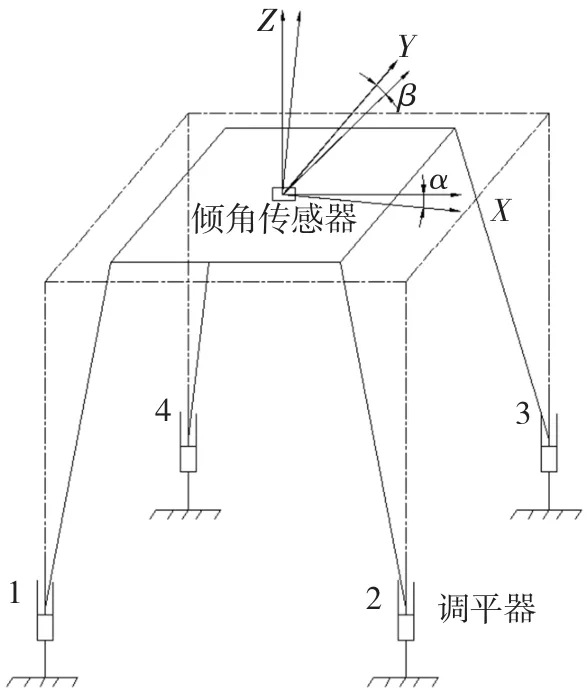
圖2 調平系統幾何模型Fig.2 Geometric model of leveling system
對于陸上4腿平臺的調平系統主要有3支承和4支承兩種調平方案。3支承調平方案比較容易實現,但抗傾覆能力差。4支承調平方案抗傾覆能力強,但存在靜不定問題,容易產生“虛腿”的問題,靜不定次數越高,系統越復雜[7-8]。本調平系統采用4支承調平方案,在導管架頂面中心安裝一個雙軸傾角傳感器,分別檢測橫滾角和俯仰角的傾斜度的變化。以導管架頂面中心坐標為原點建立坐標系,X軸向傾角為α,Y軸向傾角為β。
設導管架主尺寸為L1×L2,導管架與X,Y方向的傾角分別為α,β,從導管架坐標系到水平坐標系的轉換矩陣為
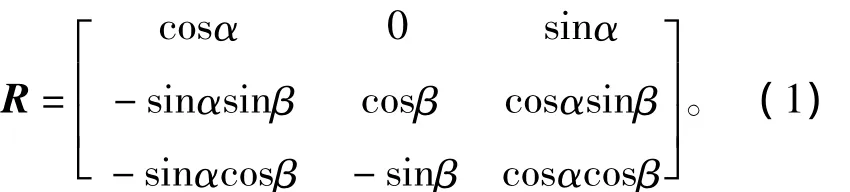
如圖2所示,設導管架坐標系先繞y軸旋轉α角,再繞x軸旋轉β角,變換到水平坐標的位置,正負值依據右手定則確定。以導管架中心為坐標原點,根據導管架4個腿的坐標,通過坐標變換矩陣算出每個腿在水平坐標中的高度值h1、h2、h3、h4。
以腿1的高度h1為例,導管架尺寸為L1×L2,所以腿1在導管架坐標系的坐標值為[-L1/2,-L2/2,0]T,則其在水平坐標系的坐標為
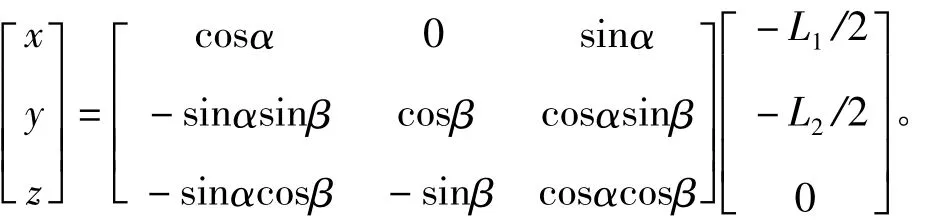
調平系統調平過程只需關心高度分量,也即其坐標的Z軸分量的大小,1腿高度為

其余3腿高度的計算方法同理。
導管架調平前與調平后的平面夾角用傾斜矢量γ(γ,θ)來表示,矢徑γ大小表傾斜角的大小,矢角θ的大小代表傾斜的梯度方向,按照幾何關系可得傾斜矢量與α,β的關系為

在調平過程中,矢量γ(γ,θ)的矢徑γ不斷縮小,一直達到滿足精度要求為止,矢角θ的變化根據調平策略不同而不同。
對于4腿導管架,位置誤差控制調平法采用半升半降向中間點逼近方式。
導管架在海底就位后,調平器下套筒的夾爪夾緊導管架樁腿套管,在調平缸完全伸出后上套筒的夾爪夾緊鋼管樁,調平缸收縮至一半將導管架提起后,各樁腿根據系統控制分別通過上升和下降的調整動作向中間點靠攏,直到導管架達到水平度要求,經實驗驗證此調平策略的調平速度最快。
2 受控對象數學模型
調平系統采用雙輸入單輸出的模糊控制算法,模糊控制調平系統原理如圖3所示。
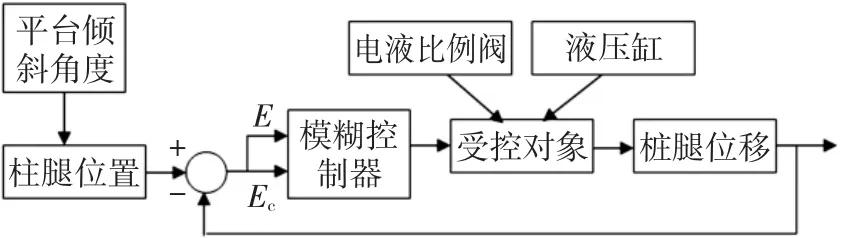
圖3 控制系統原理圖Fig.3 Principle diagram of control system
受控對象包括電液比例閥和液壓缸。按照電液比例方向閥在實驗中的分析結論,其傳遞函數可用二階震蕩環節近似表示為[9]
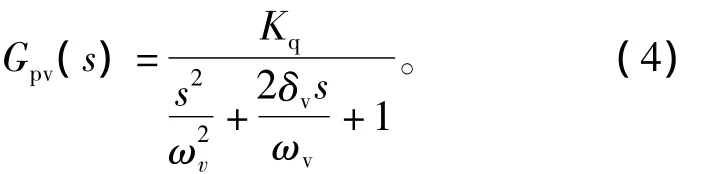
式中:Kq為閥的流量增益;ωv為閥的固有頻率;δv為閥的阻尼比。
導管架調平器液壓缸在數學分析中常采用傳遞函數表示為
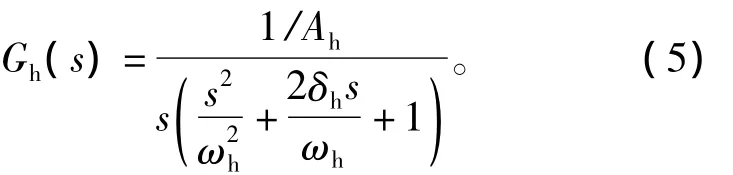
式中:Ah為液壓缸有效面積;ωh為液壓缸固有頻率;δh為液壓缸阻尼比。
根據式(4)和式(5)可得受控對象的傳遞函數為
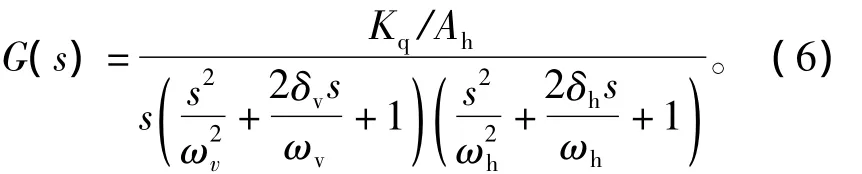
根據所選比例閥參數和設計液壓缸的參數可知,s4、s4的系數極小,為了簡化計算可忽略不計。
3 模糊控制調平系統
導管架調平模糊控制系統原理如圖3所示。
設調平液壓缸最大行程為1.2 m,因為采用向中心逼近的調平方式,因此選取高度誤差E的論域為[-0.6,0.6],根據液壓缸最大速度為 0.001 m/s,變化率Ec的論域為[-0.001,0.001],控制量U控制閥的開度的論域為[-1,1],正負值分別控制液壓缸的升高與降低。
模糊控制規則依據工程師的經驗確定。當誤差E大或較大,確定控制量U以盡快消除誤差為主;當誤差E小或較小,確定控制量U以提高調平精度避免超調為主。
4 控制系統仿真
根據上述模型和控制算法,利用Matlab環境下的仿真工具SIMULINK建立系統的仿真模型,仿真總體框圖和模糊控制器示意圖分別如圖4和圖5所示。
1)無環境載荷影響下調平系統仿真
導管架根據平臺使用功能的要求,其需要達到的水平度有所區別,仿真中設定初始傳感器檢測傾角X軸向傾角α=0.8°,Y軸向傾角為β=-0.5°,設定平臺水平精確度要求即矢徑γ大小不大于0.01°,調平系統仿真結果如圖6、圖7所示。
圖6中顯示的為各支撐樁腿相對與調平中間點的高度差隨時間變化逐漸趨于0的過程,也即導管架調平的過程,通過圖7中α、β和矢徑γ變化曲線圖也可看出,導管架隨調平時間變化趨水平的過程。
反映導管架傾斜方向的參數矢角變化曲線如圖8所示。
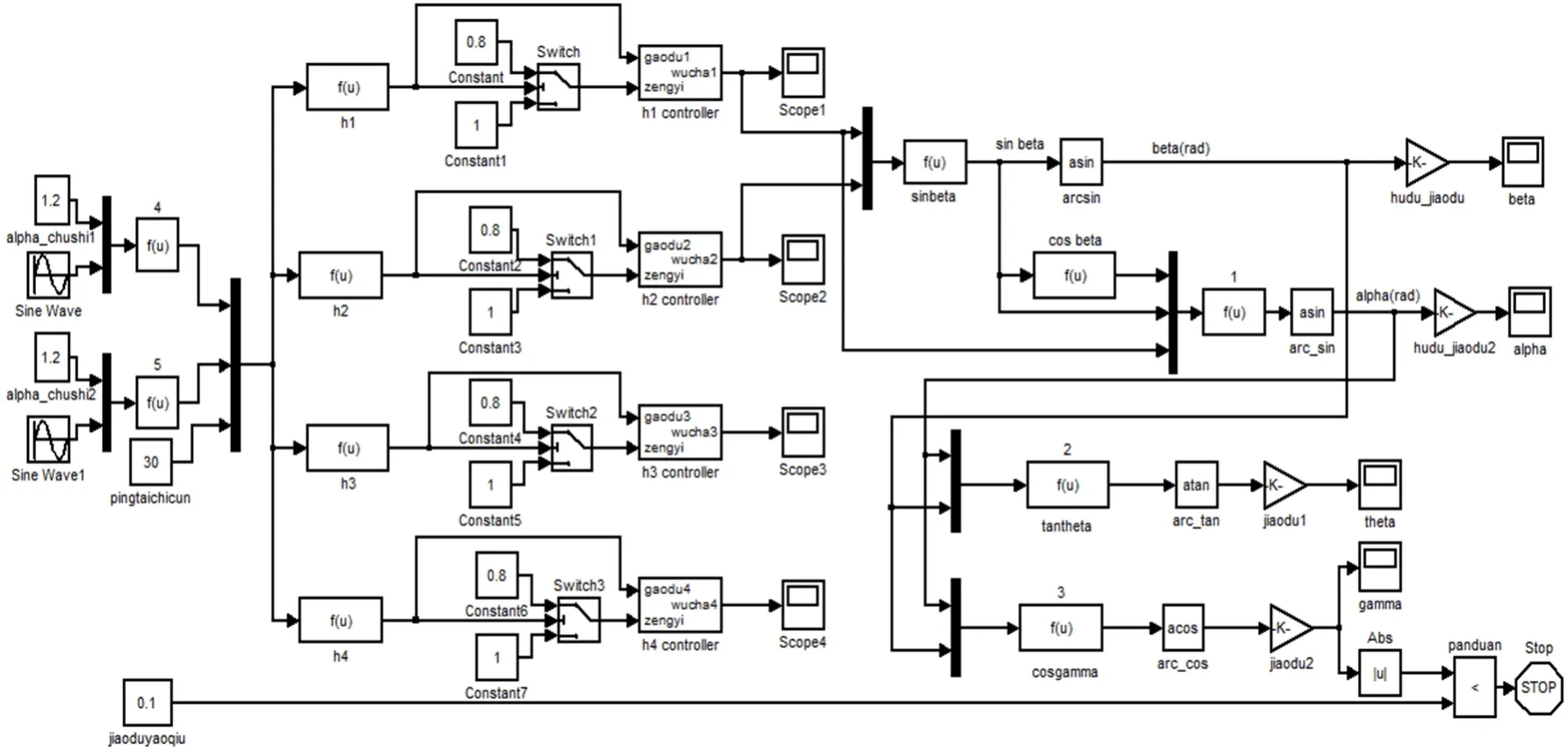
圖4 仿真總體框圖Fig.4 Block diagram of simulation
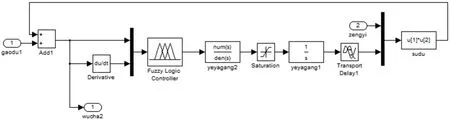
圖5 模糊控制器框圖Fig.5 Block diagram of fuzzy controller
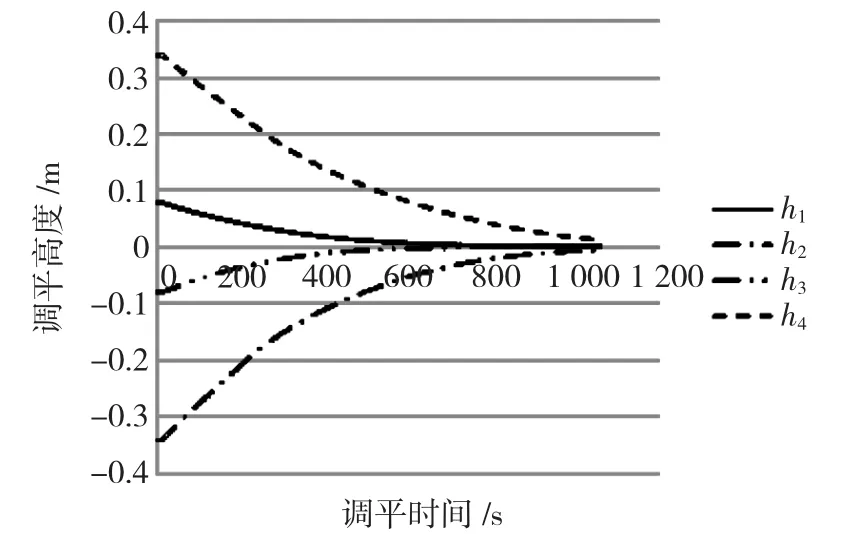
圖6 調平過程各支撐樁腿高度變化曲線Fig.6 Curve of each leg height in leveling process

圖7 調平過程平臺傾角變化曲線Fig.7 Curve of platform angle in leveling process
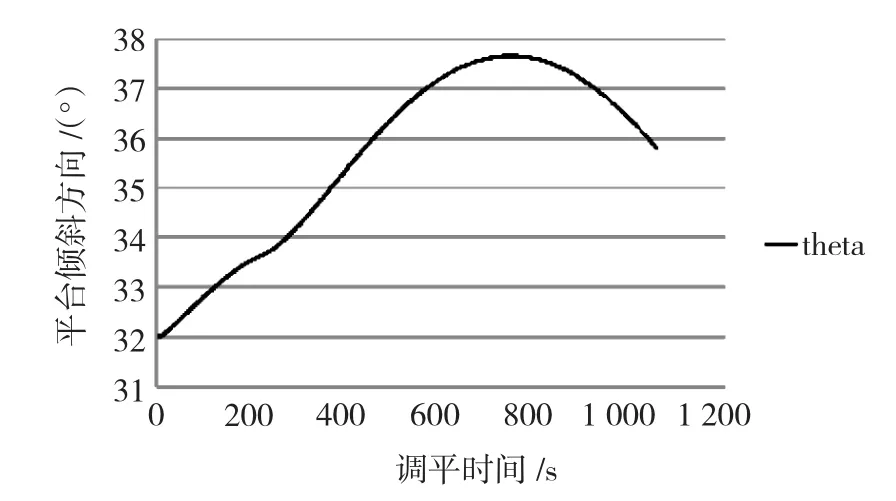
圖8 調平過程平臺傾斜方向變化曲線Fig.8 Curve of tilt direction in leveling process
2)波浪載荷影響下調平系統仿真
實際工程中,平臺的用途不同,其導管架安裝精度要求也有所差別,根據某平臺《海上安裝技術規格書》的要求,導管架安裝后,其調平精度為對角線方向的水平誤差不超過152 mm,設導管架對角線45 m,平臺水平精度要求為arcsin(0.152/45)≈0.19°,由于導管架在波浪作用下會產生一定范圍內的振動響應,根據資料分析,100 m高導管架在波浪的作用下其振動響應可達到100 mm幅度,其產生的角度變化經計算約為0.03°,因此考慮實際海況下調平系統的精度要求將大大降低,設為0.1°,但由于受到不確定的隨機波浪載荷影響,因此要求系統必須具備較強的魯棒性。為模擬海浪環境下調平系統的調平過程,在仿真環境中加入隨機波浪干擾[10]。
實際波浪是一個連續的隨機過程,將波浪的隨機干擾沿X軸方向時輸入時,α=0.9°,β=-1.2°仿真曲線如圖9、圖10和圖11所示。
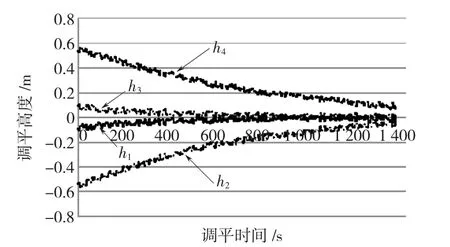
圖9 隨機波浪干擾各支撐樁腿高度變化曲線Fig.9 Curve of each leg height in leveling process with random wave interference
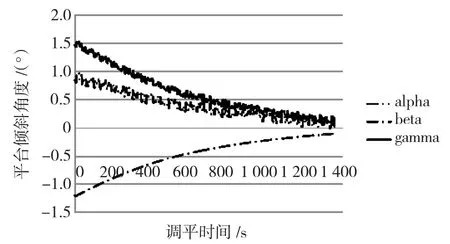
圖10 隨機波浪干擾傾角變化曲線Fig.10 Curve of platform angle in leveling process with random wave interference
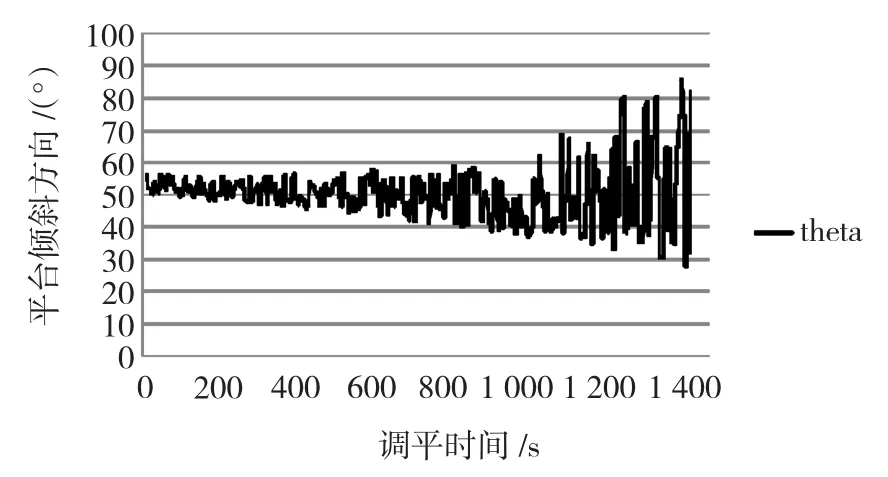
圖11 隨機波浪干擾平臺傾斜方向變化曲線Fig.11 Curve of tilt direction in leveling process with random wave interference
5 結論
1)由隨機干擾影響下調平系統的調平過程仿真中可以看出,隨調平過程進行,各支撐樁腿趨近于中間點,導管架傾角也隨之減小到要求的精度范圍,根據仿真結果曲線可以看出,基于模糊控制的調平系統,具有較強的魯棒性,可以解決傳統調平方式存在的問題。
2)導管架傾斜方向隨著導管架不斷調平而變化幅度增大,即導管架趨于水平后,受波浪干擾其傾斜方向變化將會增大,主要是由控制策略引起。
3)為保證調平系統的實際應用,研制樣機對調平系統進行實驗研究將是下一步研究的主要工作。
[1]侯金林.導管架調平與灌漿系統[J].中國海上油氣(工程),2000,12(4):20 -22.
HOU Jinlin.Jacket adjusting plane and grouting system[J].China Offshore Oil and Gas,2000,12(4):20 -22.
[2]DUAN Zhongdong,ZHOU Daocheng.Calibration of LRFD format for steel jacket offshore platforms in China offshore area[J].China Ocean Engineering,2006,12(1):1 -14.
[3]朱紹華.文昌油田深水導管架安裝技術[J].中國海上油氣(工程),2003,15(1):12 -14.
ZHU Shaohua.Deep water jacket of Wenchang oilfield installation technology[J].China Offshore Oil and Gas Engineering,2003,15(1):12-14.
[4]任新剛.鉤扣式導管架調平器關鍵技術研究[D].哈爾濱:哈爾濱工程大學,2007.
[5]蘇厚德,李金波,任永泉,等.海洋導管架在復雜載荷作用下的動態響應[J].石油化工設備,2011,40(6):35 -37.
SU Houde,LI Jinbo,REN Yongquan,et al.Dynamic response analysis of jacket platform under complex loads[J].Petro - chemical equipment,2011,40(6):35 -37.
[6]吳芳,趙德有.水對船舶與海洋建筑物結構振動影響的研究[J].中國海洋平臺,2007,22(3):22 -26.
WU Fang,ZHAO Deyou.Effect of water on the ship and ocean engineering structure[J].China Offshore Platform,2007,22(3):22-26.
[7]凌軒,曹樹平,朱玉泉,等.基于模糊自適應控制的四點支撐液壓平臺自動調平方法[J].機床與液壓,2007,35(12):84-86.
LING Xuan,CAO Shuping,ZHU Yuquan,et al.Fuzzy self-adapting automatically leveling method for four supports hydraulic platform[J].Machine Tool& Hydraulics,2007,35(12):84 -86.
[8]王海淼,萬彥輝,孟衛鋒.自適應模糊PID控制在慣性平臺數字調平系統中的應用[J].彈箭與制導學報,2005,25(3):145-147.
WANG Haimiao,WAN Yanhui,MENG Weifeng.The application of self-adaptive fuzzy PID control to the digital leveling system of platform INS [J].Journal of Projectiles,Rockets,Missiles and Guidance,2005,25(3):145 -147.
[9]高欽和.大型裝置起豎過程的電液比例控制研究[J].機械工程學報,2004,40(2):189 -192.
GAO Qinhe.Study on electrohydraulic proportion control in largesize mechanism erecting process[J].Chinese Journal of Mechanical Engineering.2004,40(2):189 -192.
[10]嵇春艷.海洋平臺動力響應分析與振動控制技術研究[D].青島:中國海洋大學,2003.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32