減震彈簧故障下直線篩力學(xué)模型突變研究
2012-09-15 08:49:58彭利平劉初升
振動(dòng)與沖擊 2012年18期
彭利平,劉初升,王 宏
(中國礦業(yè)大學(xué) 機(jī)電工程學(xué)院,江蘇 徐州 221116)
振動(dòng)篩在強(qiáng)交變載荷下受迫振動(dòng),易發(fā)生疲勞損壞或破壞。目前,國內(nèi)外對振動(dòng)篩篩體、橫梁等結(jié)構(gòu)損壞的研究較多[1-4],而對減震彈簧故障研究的相關(guān)報(bào)道很少[5]。在實(shí)際生產(chǎn)過程中常有減震彈簧嚴(yán)重扭曲變形、互相啃螺旋等彈簧損壞,致使篩箱兩側(cè)板對稱點(diǎn)的振幅差不滿足設(shè)計(jì)要求,破壞了振動(dòng)篩的工作穩(wěn)定性,進(jìn)而產(chǎn)生其他結(jié)構(gòu)損傷。實(shí)際生產(chǎn)過程中,對于彈簧斷裂等嚴(yán)重變形現(xiàn)象,可直接觀察;而對于疲勞等引起的彈簧故障,其外部特性變化不明顯,只能借助振動(dòng)篩力學(xué)特性間接判斷。此時(shí),振動(dòng)篩減振彈簧故障的力學(xué)表現(xiàn)主要為彈簧剛度值的變化。國內(nèi)外對于剛度變化下振動(dòng)系統(tǒng)的動(dòng)力學(xué)特性已進(jìn)行了相關(guān)研究[6,8-10],基于此,針對減振彈簧故障下的直線篩系統(tǒng),假設(shè)故障程度相同,即故障彈簧剛度值相等,表1定性分析了不同彈簧健康狀態(tài)組合下直線篩的力學(xué)特性(×—彈簧故障,○—彈簧無故障),不難看出,減震彈簧故障下直線篩的力學(xué)特性表現(xiàn)更為豐富,因此傳統(tǒng)的基于各彈簧相同條件下建立的直線篩單自由度模型無法表征彈簧故障下系統(tǒng)全部力學(xué)特性。本文從傳統(tǒng)的直線篩單自由度模型出發(fā),分析并建立了其二、三自由度突變模型,討論了系統(tǒng)向多自由度方向模型突變的可能性,并利用數(shù)值方法對各模型間突變過渡過程進(jìn)行了仿真分析,得出了系統(tǒng)在時(shí)域內(nèi)剛度變化引起的力學(xué)特性變化。
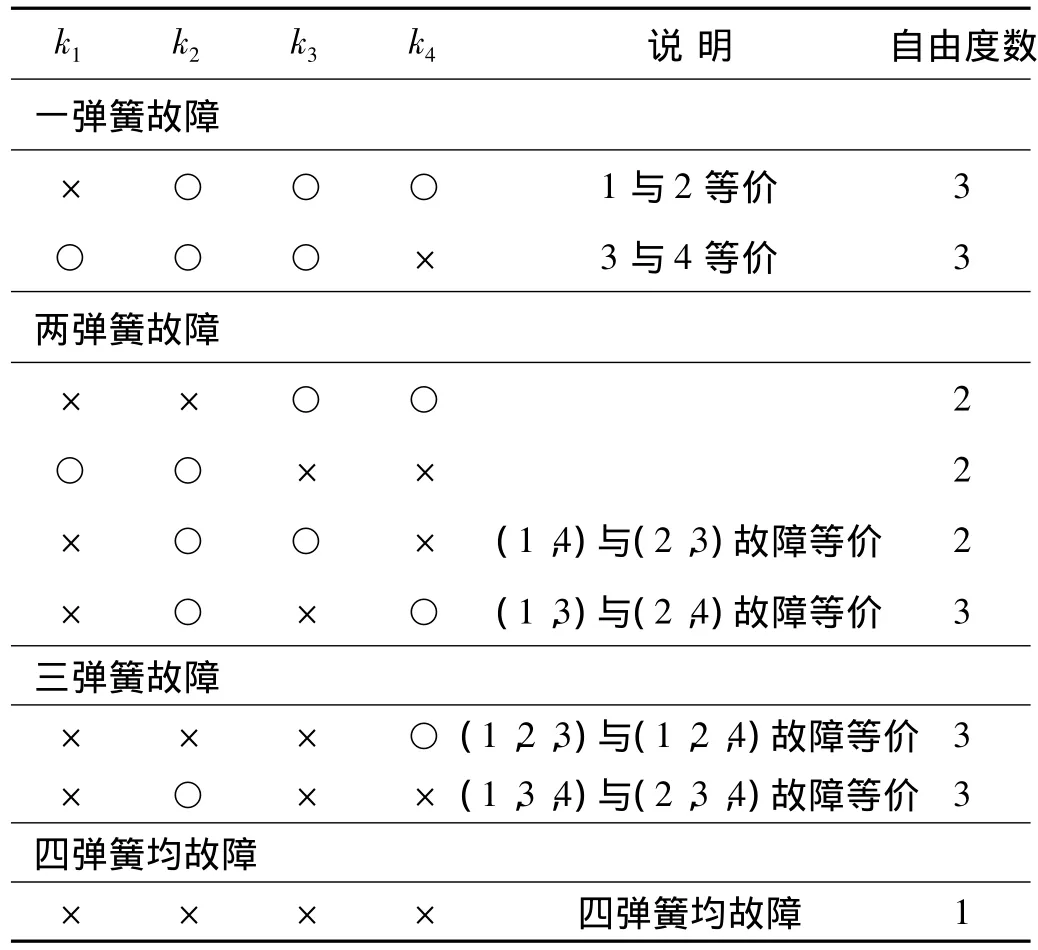
表1 減震彈簧健康狀態(tài)組合Tab.1 Combinations of health state of damping springs
1 傳統(tǒng)單自由度(1-DOF)模型
傳統(tǒng)的直線篩篩面水平,在非水平布置的兩激振器協(xié)同作用下,篩箱在激振力方向上來回振動(dòng),篩面運(yùn)動(dòng)軌跡與水平方向成一定傾角,即振動(dòng)方向角。為簡化建模,方便與以下的多自由度模型作對比,這里采用篩面傾斜而激振器水平布置的方式,構(gòu)成的單自由度直線篩(圖1(a)、圖1(b))的激振器所產(chǎn)生的離心力經(jīng)過振動(dòng)篩質(zhì)心,且始終保持豎直方向,從而使篩體在豎直方向上作往復(fù)直線運(yùn)動(dòng),實(shí)現(xiàn)物料的篩分與傳送。
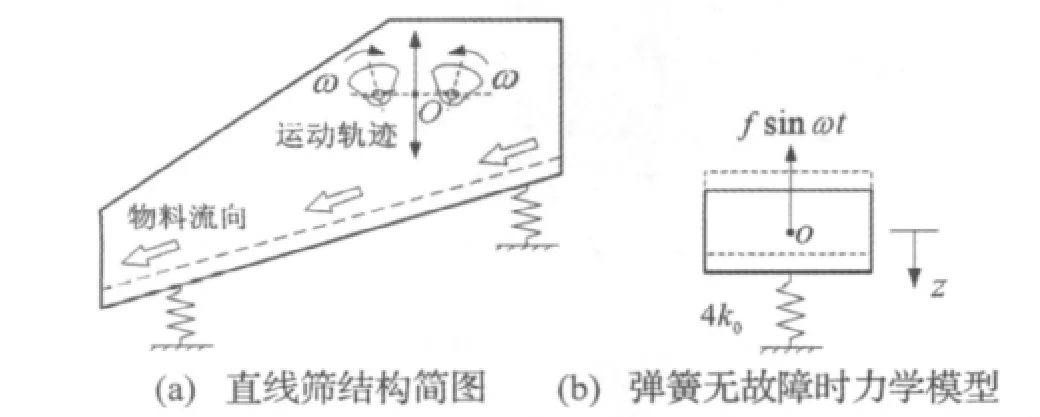
圖1 傳統(tǒng)單自由度直線篩結(jié)構(gòu)簡圖及動(dòng)力學(xué)模型Fig.1 Structural sketch and dynamic model of traditional 1-DOF liner vibrating screen
動(dòng)力學(xué)方程為:

假設(shè)系統(tǒng)模型突變時(shí)迅速到達(dá)到穩(wěn)態(tài)振動(dòng)狀態(tài),即:

2 突變模型
2.1 二自由度(2-DOF)突變模型
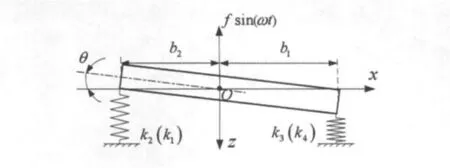
圖2 二自由度力學(xué)突變模型Fig.2 2- DOF catastrophic model
強(qiáng)交變載荷下,當(dāng)彈簧健康狀況為兩彈簧發(fā)生故障時(shí),對振動(dòng)特性的表示可能需要兩個(gè)廣義變量,由于激振電機(jī)的能量補(bǔ)償,系統(tǒng)運(yùn)動(dòng)穩(wěn)定時(shí)可忽略其阻尼的影響,傳統(tǒng)單自由度模型突變?yōu)槎杂啥饶P?圖2,廣義變量為z,θ)。該模型中,以激振中心O為原點(diǎn)建立坐標(biāo)系,O點(diǎn)同時(shí)為振動(dòng)篩計(jì)算質(zhì)心;各彈簧剛度分別為 k1、k2、k3、k4,繞物料進(jìn)、出口方向(x 軸方向)上彈簧1(2)、3(4)到原點(diǎn)的水平距離分別為b1、b2,激振力為fsin(ωt);篩面豎直方向的相對于靜平衡位置的跳動(dòng)位移為z,繞y軸擺動(dòng)的轉(zhuǎn)動(dòng)慣量為Jy,角位移為θ。
圖2模型所對應(yīng)動(dòng)力學(xué)方程為:
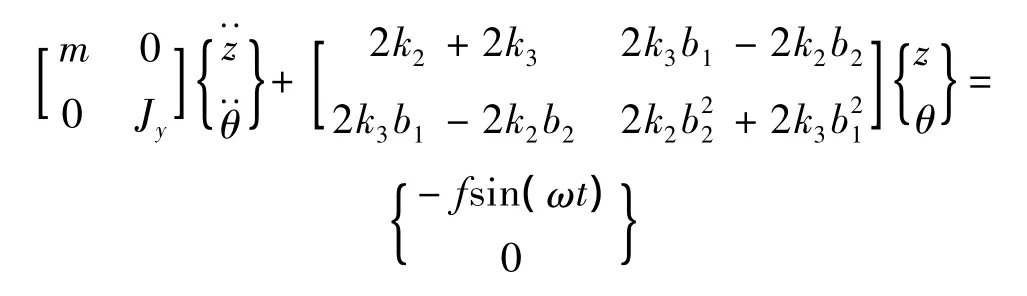
系統(tǒng)固有頻率可由系統(tǒng)特征方程計(jì)算得到,其穩(wěn)態(tài)振動(dòng)可利用求解多自由度無阻尼系統(tǒng)強(qiáng)迫振動(dòng)的振型疊加法求得[11]。很明顯,該模型尤指表1中兩彈簧發(fā)生故障且剛度滿足k1=k2≠k3=k4的彈簧健康狀態(tài),而對于k1=k4≠k2=k3的情況,模型失效,但此時(shí)的力學(xué)模型與圖2類似,不另給出。
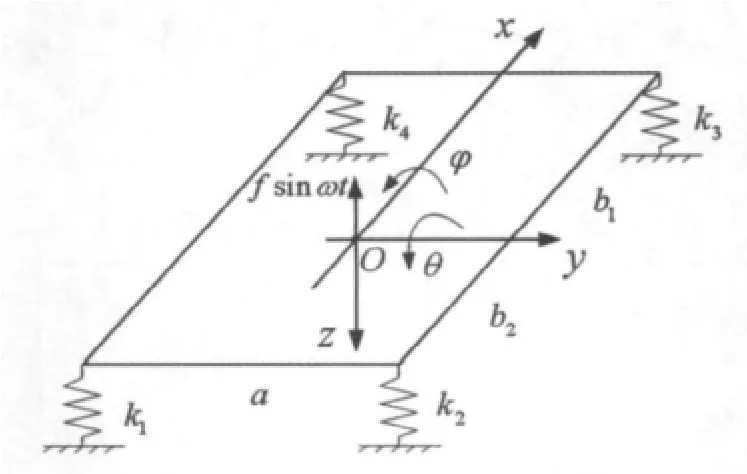
圖3 三自由度力學(xué)突變模型Fig.3 3- DOF catastrophic model
2.2 三自由度(3-DOF)突變模型
彈簧健康狀況組合如表1中一彈簧故障或三彈簧故障時(shí),其振動(dòng)形式是空間上的上下跳動(dòng),左右、前后翻轉(zhuǎn)的振動(dòng)組合,篩體具有三個(gè)自由度(z,φ,θ)。由于激振電機(jī)的能量補(bǔ)償,可以忽略系統(tǒng)阻尼對系統(tǒng)穩(wěn)定狀態(tài)下的影響。在建立其三自由度突變動(dòng)力學(xué)模型(圖3所示)時(shí)進(jìn)行了以下幾點(diǎn)假設(shè)[7]:
(1)振動(dòng)篩篩面的彈性變形相對于彈簧變形可以忽略不計(jì),即將篩面視為剛體,始終保持平面狀態(tài);
(2)彈簧微小損壞下引起的振動(dòng)篩擺動(dòng)幅度很小,可近似認(rèn)為彈簧始終保持豎直方向的形變。
該模型仍以振動(dòng)篩計(jì)算質(zhì)心及激振中心O為坐標(biāo)原點(diǎn)。各彈簧剛度分別為k1、k2、k3和k4,y軸方向上彈簧1、2到原點(diǎn)的水平距離均為a/2,其他模型特征如2.1中所述。
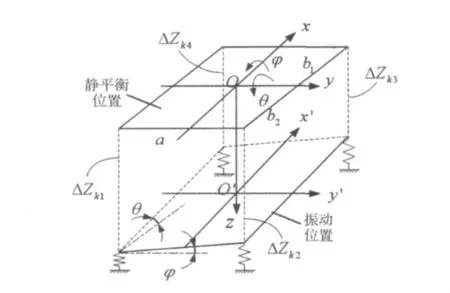
圖4 減振彈簧壓縮形變量的計(jì)算示意圖Fig.4 Calculation schematic diagram for the compressed deformation of damping springs
根據(jù)圖4所示篩面某一時(shí)刻的振動(dòng)位置相對于靜平衡位置的相對關(guān)系,各彈簧的壓縮形變量用三個(gè)廣義自由度可以表示為:
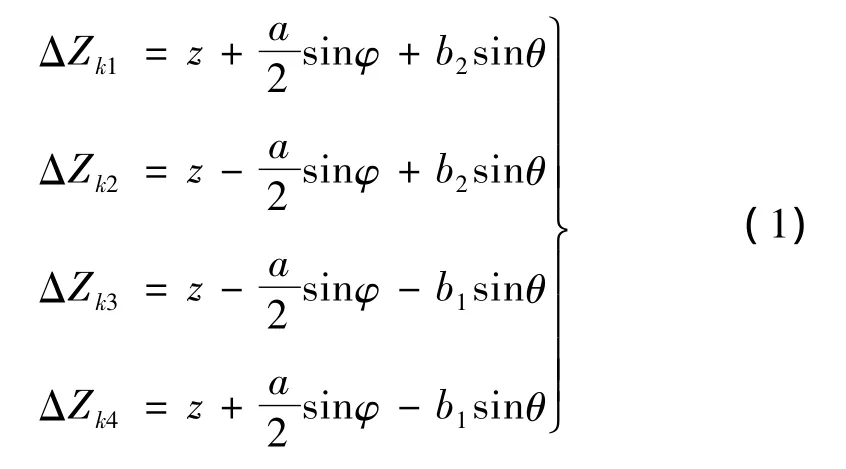
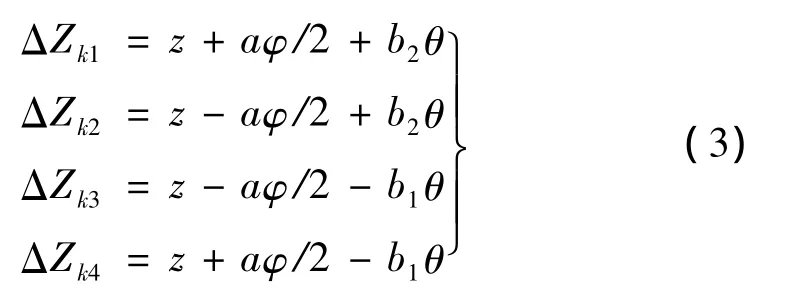
考慮到建立模型時(shí)假設(shè)的彈簧微小損壞下引起的振動(dòng)篩擺動(dòng)幅度很小,于是有:

將式(2)代入式(1)得:
即為振動(dòng)篩無阻尼振動(dòng)時(shí)篩體與減振彈簧連接處上壓板在豎直方向上的振動(dòng)位移,對其通過一次、二次微分可以得到上壓板的振動(dòng)速度及加速度。
對于一個(gè)n自由度的系統(tǒng),其振動(dòng)微分方程可由以下拉格朗日方程建立:

其中,qj為系統(tǒng)的廣義坐標(biāo)為系統(tǒng)廣義速度,T為系統(tǒng)的動(dòng)能,U為系統(tǒng)勢能,D為系統(tǒng)的能量耗散函數(shù),F(xiàn)j為廣義激振力。
對于本文中的振動(dòng)篩系統(tǒng),依次有:

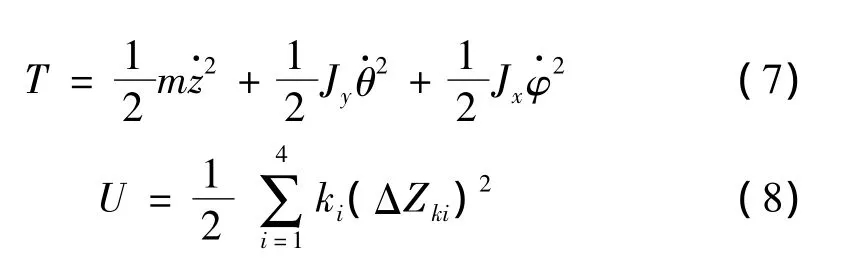
由于是簡諧力強(qiáng)迫振動(dòng),運(yùn)動(dòng)穩(wěn)態(tài)情況下可以忽略阻尼的影響,即:

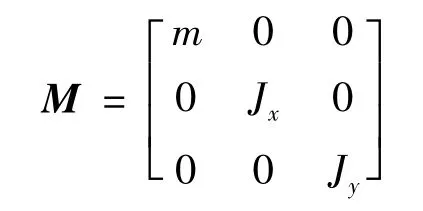
將式(3)、式(5)~式(9)代入式(4),整理后即可得到該無阻尼系統(tǒng)強(qiáng)迫振動(dòng)微分方程:

式中:
位移向量x=[z θ φ]T
外力向量F=[-fsinωt 0 0]T
質(zhì)量矩陣:
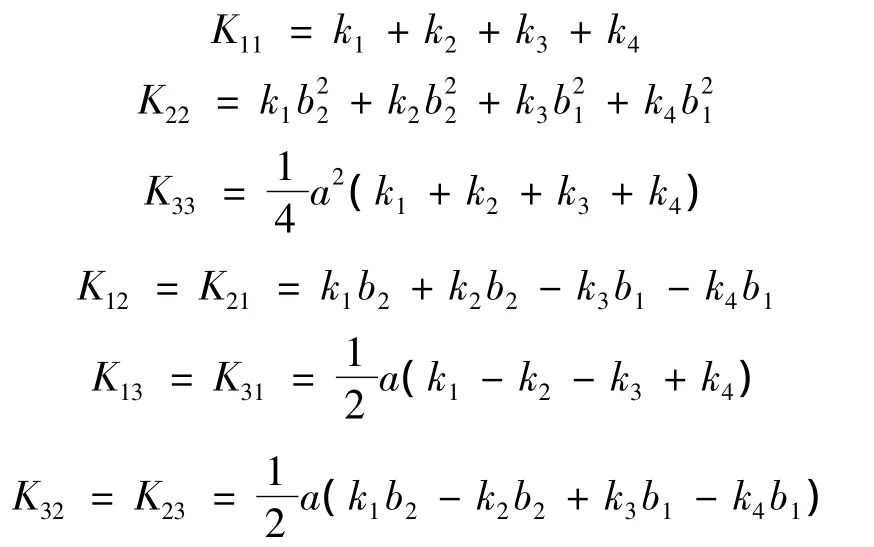
剛度矩陣:
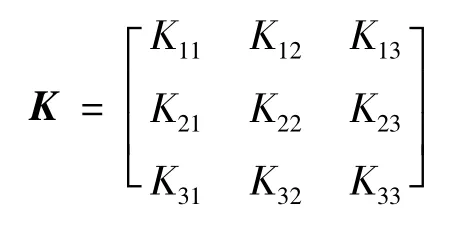
剛度矩陣的各元素表示為:
這里亦可利用振型疊加法[11]求解方程。
3 模型突變過程及仿真結(jié)果
3.1 突變過程
振動(dòng)篩在穩(wěn)定運(yùn)動(dòng)的情況下因彈簧故障引起系統(tǒng)力學(xué)模型突變,此瞬間過程可認(rèn)為系統(tǒng)的狀態(tài)參數(shù)如位移(角位移)、速度(角速度)等不發(fā)生變化[8-10]。基于這個(gè)特點(diǎn),可以將模型突變前系統(tǒng)末狀態(tài)作為突變后系統(tǒng)的初始狀態(tài),通過上述振型疊加法求出產(chǎn)生突變的多自由度系統(tǒng)的時(shí)域響應(yīng)特性。
圖5表明了直線篩力學(xué)模型因彈簧故障而向自由度更多的方向突變的過程,其中C指代系統(tǒng)狀態(tài)參數(shù)的集合。t0~t1時(shí)間段內(nèi)系統(tǒng)以傳統(tǒng)單自由度(1-DOF)模型振動(dòng),t0時(shí)刻的狀態(tài)定義為C10、t1時(shí)刻的狀態(tài)定義為C1t;t1~t2時(shí)間段內(nèi)系統(tǒng)表現(xiàn)為突變二自由度(2-DOF)模型,初始狀態(tài)為 C20、末狀態(tài)為 C2t,很明顯,C20=C1t;同理,系統(tǒng)在t2~t3時(shí)間段內(nèi)可描述為突變?nèi)杂啥?3-DOF)模型,其初始狀態(tài)即為2-DOF模型的末狀態(tài),即C30=C2t。表2列出了直線篩力學(xué)模型向自由度增多方向單向突變的可行路線。
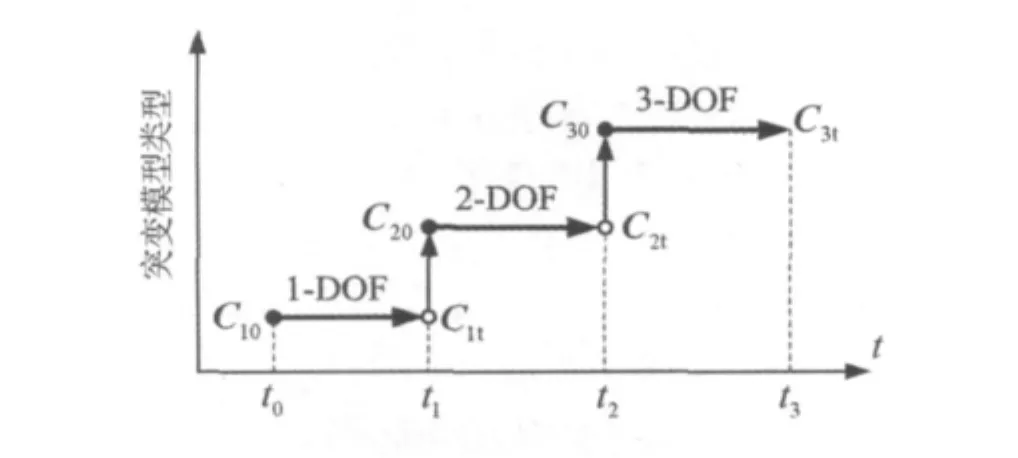
圖5 模型向更多自由度單向突變的過程Fig.5 Catastrophic process for more degrees of freedom of the models

表2 模型向更多自由度單向突變的可行路線Tab.2 Workable routes of the catastrophe for more degrees of freedom of the model
需要指出的是,健康狀況下的直線篩在彈簧剛度變化的過程中,其自由度個(gè)數(shù)變化的可能性有很多種,可以朝自由度增多或減少的方向單向突變,也可以向兩個(gè)方向混合突變,因此這個(gè)過程可能是一個(gè)混沌的過程。考慮到振動(dòng)篩實(shí)際工作情況,這里只分析其力學(xué)模型向多自由度增加的方向單向突變的時(shí)間歷程。
3.2 突變過程仿真
這里以現(xiàn)有的直線振動(dòng)篩實(shí)驗(yàn)?zāi)M機(jī)為例,并利用Matlab軟件對模型突變過程中振動(dòng)篩振動(dòng)輸出進(jìn)行仿真模擬。該振動(dòng)篩的篩面尺寸 a=0.796 m,b1=0.429 m,b2=0.296 m,振動(dòng)篩總質(zhì)量 m=219.8 kg,繞x軸的轉(zhuǎn)動(dòng)慣量Jx=16.67 kg·m2,繞y軸的轉(zhuǎn)動(dòng)慣量Jy=23.88 kg·m2,最大激振力 f=5 000 N,激振電機(jī)角速度ω=104.72 rad/s。彈簧初始為健康狀態(tài),剛度值k1=k2=k3=k4=31 210 N/m;令故障彈簧剛度值均為25 260 N/m,并保持不變。根據(jù)以上物理參數(shù),可以計(jì)算:彈簧無故障時(shí),單自由度直線篩系統(tǒng)的固有頻率為23.83 rad/s;故障下突變二自由度系統(tǒng)的二階固有頻率分別為20.25 rad/s和27.75 rad/s;故障下突變?nèi)杂啥认到y(tǒng)的三階固有頻率依次為20.23 rad/s、26.19 rad/s和32.08 rad/s,此時(shí)振動(dòng)篩在遠(yuǎn)共振區(qū)工作。其力學(xué)模型向自由度增多方向單向突變的時(shí)間歷程中,質(zhì)心處篩面沿z軸方向的位移,以及繞y軸、x軸方向的角位移的仿真結(jié)果如圖6~圖9所示(圖中“·”指代突變位置)。
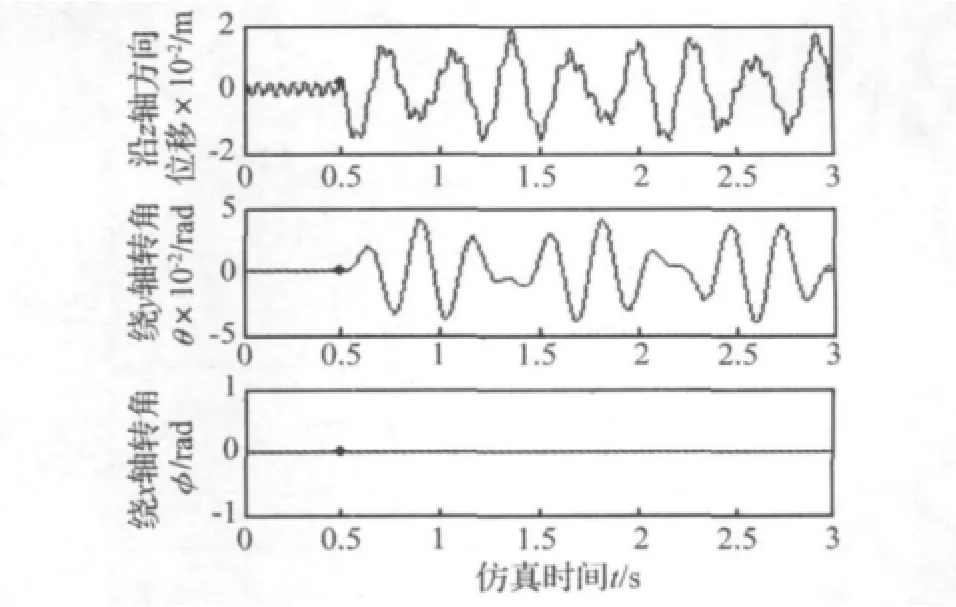
圖6 1-DOF→2-DOF突變過程Fig.6 Catastrophic process from 1-DOF to 2-DOF model
圖6給出了0~3 s時(shí)間段內(nèi),直線篩從單自由度運(yùn)動(dòng)向二自由度(k1=k2=25 260 N/m,k3=k4=31 210 N/m)運(yùn)動(dòng)突變的過程,其中突變發(fā)生在t=0.5 s時(shí)刻。發(fā)生故障后,z方向向上彈簧的總剛度減小,相同的激振器能量輸入時(shí),為維持系統(tǒng)能量守恒,彈簧變形應(yīng)更大,表現(xiàn)為豎直方向的振動(dòng)加強(qiáng);另外,由于自由度變化引起了篩面繞y軸的運(yùn)動(dòng)分量的產(chǎn)生,時(shí)間歷程曲線表現(xiàn)出從無到有的變化。該過程中篩面繞x軸的轉(zhuǎn)角φ始終為零,即篩面不包含該分運(yùn)動(dòng)。
圖7給出了0~3 s時(shí)間段內(nèi),直線篩從單自由度運(yùn)動(dòng)直接向三自由度(k1=k2=k3=25 260 N/m,k4=31 210 N/m)運(yùn)動(dòng)突變的過程,其中突變發(fā)生在t=0.8 s時(shí)刻。同樣,隨著自由度數(shù)的增大,系統(tǒng)振動(dòng)加強(qiáng)。而三自由度情況下,由于其三階固有頻率相近,再利用振型疊加法時(shí),其簡諧振動(dòng)合成的振動(dòng)表現(xiàn)出類似拍振現(xiàn)象。
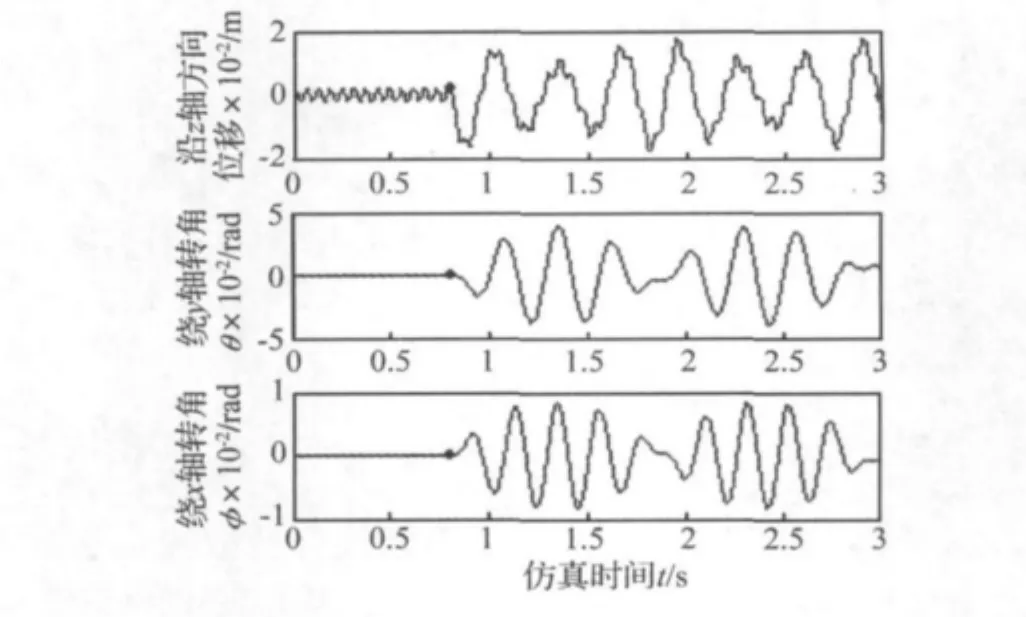
圖7 1-DOF→3-DOF突變過程Fig.7 Catastrophic process from 1-DOF to 3-DOF model
圖8給出了0~3 s時(shí)間段內(nèi),直線篩從二自由度(k1=k2=25 260 N/m,k3=k4=31 210 N/m)運(yùn)動(dòng)向三自由度(k1=k2=k3=25 260 N/m,k4=31 210 N/m)運(yùn)動(dòng)突變的過程,其中突變發(fā)生在t=0.9 s時(shí)刻。系統(tǒng)豎直方向上的振動(dòng)及繞y軸轉(zhuǎn)動(dòng)的表現(xiàn)形式幾乎不變,但是繞x軸轉(zhuǎn)動(dòng)從無到有,突變明顯,且仍表現(xiàn)為類似拍振現(xiàn)象。
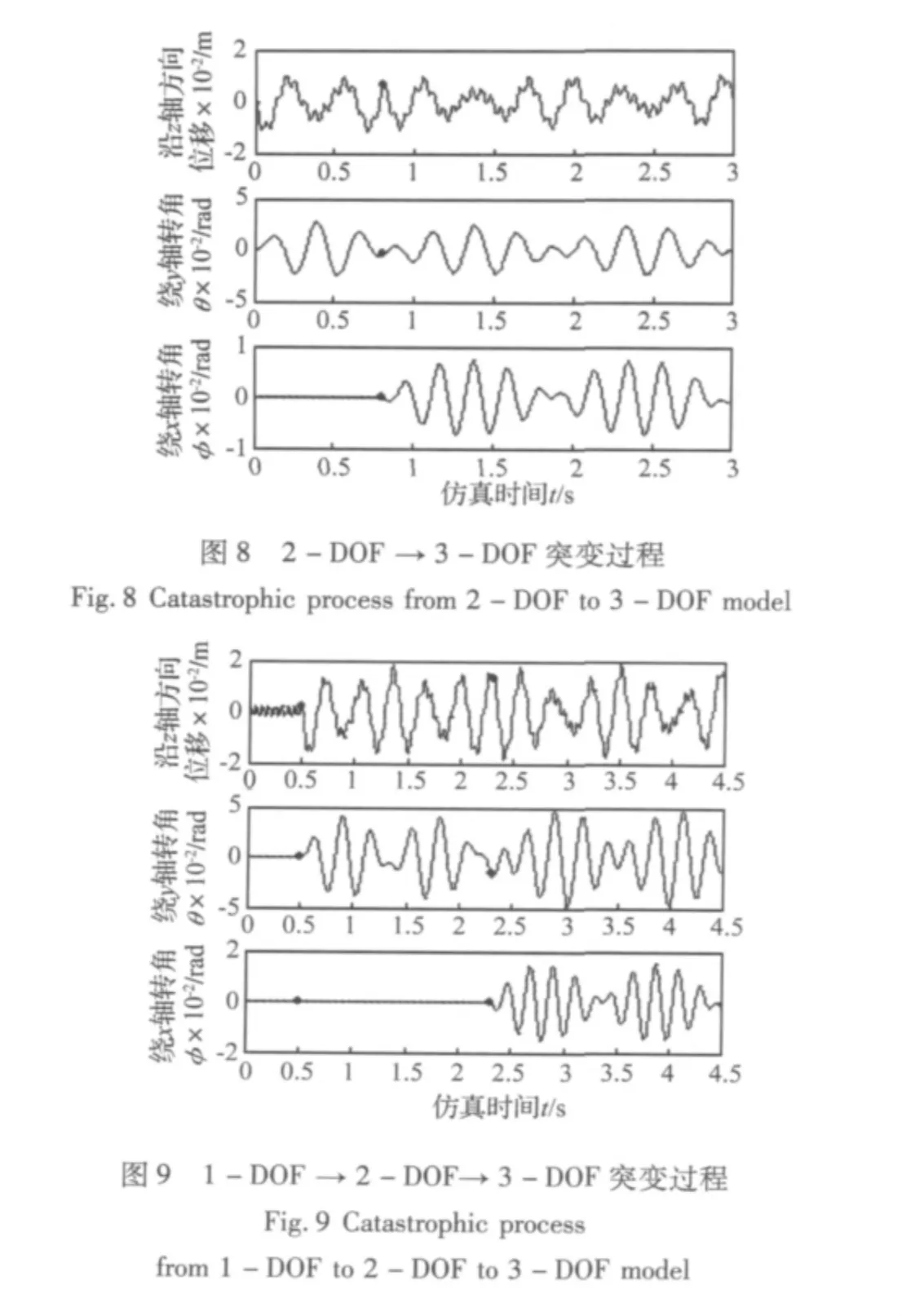
圖9給出了0~4.5 s時(shí)間段內(nèi),直線篩從健康狀態(tài)下的單自由度運(yùn)動(dòng)依次向二自由度(k1=k2=25 260 N/m,k3=k4=31 210 N/m)運(yùn)動(dòng)、三自由度(k1=k2=k3=25 260 N/m,k4=31 210 N/m)運(yùn)動(dòng)突變的過程,兩次突變分別發(fā)生在t1=0.5 s,t2=2.3 s時(shí)刻。系統(tǒng)豎直方向上的振動(dòng)及繞y軸轉(zhuǎn)動(dòng)類似簡諧振動(dòng),而繞x軸轉(zhuǎn)動(dòng)從無到有,突變明顯,且仍表現(xiàn)為類似拍振現(xiàn)象。
4 結(jié)論
本文在對直線篩振動(dòng)系統(tǒng)因減震彈簧故障而引起的力學(xué)特性突變定性分析的基礎(chǔ)上,從傳統(tǒng)的彈簧健康狀態(tài)的單自由度模型出發(fā),分別建立了兩種適合表征彈簧故障下的直線篩多自由度力學(xué)模型;分析了其突變過程,并利用模型突變瞬間系統(tǒng)狀態(tài)參數(shù)不變的特點(diǎn),對系統(tǒng)的力學(xué)突變過程中的系統(tǒng)響應(yīng)進(jìn)行了數(shù)值仿真;彈簧故障下直線篩二自由度、三自由度力學(xué)模型的建立及其振動(dòng)微分方程的推導(dǎo),以及時(shí)間歷程上直線篩彈簧故障時(shí)表現(xiàn)出的振動(dòng)加速度響應(yīng)加強(qiáng)及類似拍振等特性,為時(shí)域內(nèi)直線篩系統(tǒng)的狀態(tài)監(jiān)測與故障診斷提供了一定的理論依據(jù)。
[1] Steyn J.Fatigue failure of deck support beams on a vibrating screen[J].International Journal of Pressure Vessels and Piping,1995,61(2-3):315-327.
[2] Xue G H,Zhao G R,Wu S Y.Transfer function law and diagnosis method of large vibrating screen lower beam with crack flaw[C].2011 Third International Conference on Measuring Technology and Mechatronics Automation(ICMTMA),2011:1044-1047.
[3] 尹忠俊,劉建平,趙專東.交變載荷作用下大型振動(dòng)篩的應(yīng)力分析[J].天津大學(xué)學(xué)報(bào),2007,40(11):1363-1366.
[4] 賀孝梅,劉初升,張成勇.基于多頻約束和解析靈敏度法的大型振動(dòng)篩優(yōu)化設(shè)計(jì)[J].中南大學(xué)學(xué)報(bào)(自然科學(xué)版),2011,42(3):664-670.
[5] 雷 紅.振動(dòng)篩減振彈簧屢次損壞的原因及處理方法[J].化工礦物與加工,2007(8):39-39.
[6] Winthrop M F,Baker W P,Cobb R G.A variable stiffness device selection and design tool for lightly damped structures[J].Journal of Sound and Vibration,2005,287(4-5):667-682.
[7] 彭利平,劉初升.3自由度振動(dòng)篩動(dòng)力學(xué)建模及固有頻率分析[J].機(jī)械設(shè)計(jì),2011,28(8):50-53.
[8] 王宗勇,龔 斌,聞邦椿.剛度與阻尼突變轉(zhuǎn)子系統(tǒng)的動(dòng)力學(xué)研究[J].振動(dòng)與沖擊,2008,27(4):73-77.
[9] 劉樹英,宋雪萍,聞邦椿.轉(zhuǎn)子系統(tǒng)故障發(fā)展過程的突變[J].東北大學(xué)學(xué)報(bào)(自然科學(xué)版),2005,26(3):285-288.
[10] Ramaratnam A,Jalili N.A switched stiffness approach for structural vibration control:theory and real-time implementation[J].Journal of Sound and Vibration,2006,291(1-2):258-274.
[11] Singiresu S R,著.李欣業(yè),張明路,譯.機(jī)械振動(dòng)(第四版)[M].北京:清華大學(xué)出版社,2009.
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
