基于LMD的譜峭度方法在齒輪故障診斷中的應用
2012-09-15 08:49:04程軍圣
振動與沖擊 2012年18期
程軍圣,楊 怡,楊 宇
(湖南大學 汽車車身先進設計制造國家重點實驗室,長沙 410082)
常見的齒輪故障振動信號往往表現為調制形式,獲取幅值或頻率調制信息是提取故障特征的關鍵。包絡解調技術是齒輪故障診斷中的常用方法,但其解調過程中的濾波參數取決于操作者的經驗或歷史數據[1-2],這對于診斷結果的準確性會產生一定的影響。采用EMD(Empirical Mode Decomposition,簡稱 EMD)等自適應信號分解方法可以自動地將齒輪故障振動信號分解為若干個分量,然后選擇合適的分量進行解調分析[3],但是如何選擇合適的分量仍然需要進行研究。當齒輪發生局部故障時會引起齒輪振動信號中產生瞬態沖擊脈沖,而該脈沖頻率通常即為齒輪信號的故障特征頻率[4]。譜峭度的概念由 Dwyer[5]提出,其實質是在時頻分析后反映原始信號在每個譜段上的峭度大小,它能夠有效地反映非平穩性的存在,檢測含噪信號中的瞬態成分[6],對故障脈沖信號非常敏感,并明確地指出瞬態成分所在的頻帶,為濾波參數的選取提供依據。
最早的譜峭度是基于短時傅里葉變換(STFT)提出的,具有一定時間長度的窗口在時間軸上按一定的步長移動,計算移動窗口內的頻譜則得到不同時段信號的頻譜,然后對不同的頻帶計算其峭度即得到所謂的譜峭度。Antoni[7-8]將譜峭度方法規范化,并提出了譜峭度的快速算法-峭度圖,并將該方法運用到故障診斷中取得了較好的效果,但其主要還是基于STFT和有限沖擊響應(FIR)濾波器[9],STFT受固定窗口長度的限制不能同時兼顧時間分辨率和頻率分辨率,而FIR濾波器也不可能與每一種含特征波形的故障信號實現最佳匹配,因此峭度圖的應用有一定的局限性。國內的石林鎖等人提出了一種基于連續小波變換的譜峭度改進包絡分析方法,連續小波變換克服了STFT時頻窗口不能改變的缺點,自適應性更高,但其仍存在所得的信號分解結果只與分析頻率有關而與信號的本身頻率無關等缺點,直接影響到譜峭度方法對故障特征頻段的提取效果。針對這些不足,本文提出了基于LMD時頻分析的譜峭度故障診斷方法。LMD是一種新的時頻分析方法[10],較之STFT、小波變換等方法具有更強的自適應性,它能將一個復雜的多分量信號從高頻至低頻自適應地分解為有限個有物理意義的乘積函數(Product Function,PF)分量之和,較之現在常用的EMD方法,它的迭代次數更少,且能更好的抑制端點效應,更加完整的保留信號信息[11],因此,將 LMD方法與Hilbert變換相結合能夠得到更加準確的信號時頻分布,再在時頻分布的基礎上將信號按照不同的尺度分成若干頻段,計算每一頻段的譜峭度,根據譜峭度最大原則選取出相關頻段信號做包絡分析,避免了濾波參數選擇對人的經驗和歷史數據的依賴性,有效地檢測到瞬態信號。實驗結果表明,基于LMD時頻分析的譜峭度方法能夠成功地提取齒輪故障特征達到齒輪故障診斷的目的。
1 基于LMD時頻分析的譜峭度齒輪故障診斷方法
LMD方法的實質就是將非平穩調制信號分解為若干由包絡信號和純調頻信號乘積而得的PF(Product Function)分量,根據文獻[11],對于任意原始信號x(t),其經過LMD分解后每個PF分量均可寫成如下形式:

其中:包絡信號ai(t)為PF分量的瞬時幅值,而PF分量的瞬時頻率可以通過純調頻信號si(t)求得:

由式(1)、式(2)知,最后原始信號由下式表示:

其中:ai(t)、fi(t)分別為PF分量的瞬時幅值與瞬時頻率,n為PF分量的個數,這里忽略了余量。在式(3)中由于每個PF分量的瞬時幅值與瞬時頻率都是隨時間變化的,因此借鑒 Hilbert譜[10-11]的思想,定義式(3)右邊部分為基于LMD的時頻分布,記作:

式中:S(f,t)反映了信號幅值隨時間和頻率的變化關系。
得到信號的LMD時頻分布后,再按照不同的尺度l將時頻信號分成一系列的若干頻段mnl,其中n為每一尺度所對應的信號頻段數,若信號的頻率范圍為[0,f],則:
當l=1時:

當l=2時:
具體每一尺度所對應的頻段數可以根據實際情況確定,只要下一尺度的頻段數多于其上一尺度即可,當信號的采樣頻率越高時,需要通過越多的尺度來進行分解,這樣才足以細化頻段從而尋找最佳濾波頻段。通過時頻分析得到一系列的頻段后,再根據式(7)計算每一頻段的譜峭度:

最后,依據譜峭度最大原則選取最佳濾波頻段,對該頻段信號進行包絡分析后即可提取齒輪故障特征進行故障診斷。
2 仿真信號分析
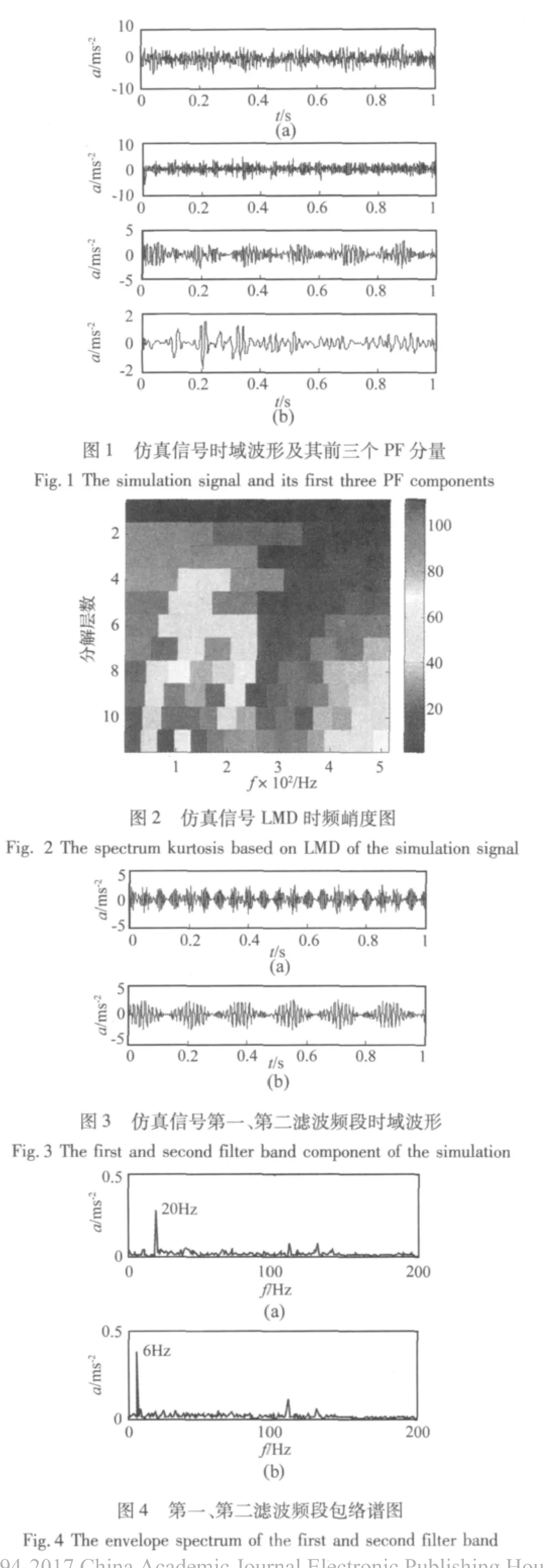
為了驗證該方法的可行性,考察如式(8)所示的仿真信號x(t):

該信號由兩個調制分量組成,添加均值為0,方差為1的白噪聲序列。圖1(a)為信號的時域圖,圖1(b)為信號經過LMD分解所得的前三個PF分量,由分量不能直接十分明顯的看出調制信息。圖2是信號基于LMD時頻分析的峭度圖,從圖中可知,在第9層第7頻段出現峭度最大值,在第11層第3頻段出現峭度次大值,分別以該兩頻段為第一濾波頻段和第二濾波頻段對信號進行FIR濾波后得到如圖3所示的時域波形,其中圖3(a)為第一頻段濾波時域波形,圖3(b)為第二頻段濾波時域波形,圖4為其對應的包絡譜圖,在圖3(a)、(b)中已經可以很明顯的看出調制頻率,而在圖4則是通過譜圖直觀地把調制頻率表示出來,可以明顯觀察到兩分量的幅值調制特征頻率6 Hz和20 Hz,證明基于LMD時頻分析的譜峭度方法有效地提取出了仿真信號的調制信息。
3 基于LMD時頻分析的譜峭度方法在齒輪故障診斷中的應用
當齒輪出現斷齒、裂紋、磨損等故障時,齒輪嚙合振動信號的幅值和相位均會發生變化,產生幅值和相位調制,圖5為一斷齒故障齒輪的時域波形,齒輪信號采集實用裝置及測量方法見文獻[12],其采樣頻率為1 024 Hz,轉頻為7 Hz,該齒輪故障信號經LMD時頻分析后的時頻圖如圖6所示,在圖上不能看出任何故障信息,圖7是基于LMD時頻分析所得到的峭度圖,從該圖中可以看出在第11層第14頻段上譜峭度取得最大值,說明此頻段包含了齒輪振動故障信息,以此為濾波頻段對該信號進行濾波包絡后得到如圖8所示的齒輪斷齒故障信號包絡譜,在圖中可以看到在7Hz處具有明顯譜線,該頻率剛好與齒輪的工作轉頻相吻合,證明該齒輪確實存在局部故障。基于LMD時頻分析的譜峭度法成功地提取出齒輪故障特征。
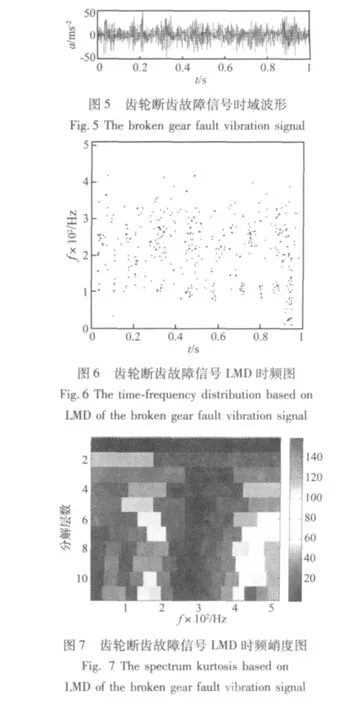
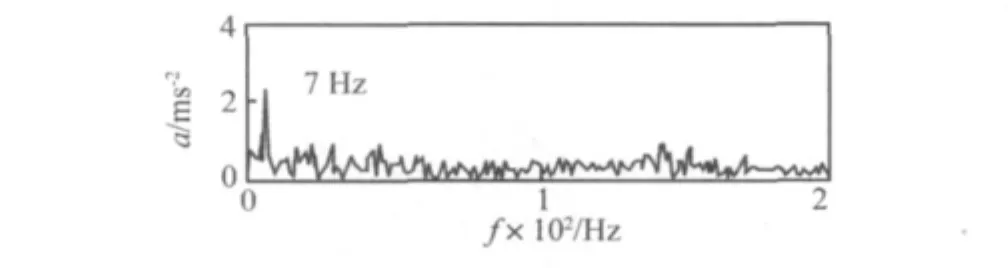
圖8 齒輪斷齒故障信號濾波后包絡譜圖Fig.8 The envelope spectrum of filtered broken gear fault vibration signal
當將基于LMD時頻分析的譜峭度方法用于正常齒輪時,齒輪的峭度圖各頻段峭度值明顯小于斷齒故障齒輪,且其經過濾波包絡后譜圖上也不會發現明顯故障特征譜線。圖9是一正常齒輪的時域波形,采樣頻率仍為1 024 Hz,轉頻仍是7 Hz,圖10是其經過LMD時頻分析后得到的峭度圖,由圖可知,在第9層第6頻段出現了相對較大譜峭度,且整個峭度圖中的最大峭度值在40左右,對比圖7的最大譜峭度值150其降低了很多,同時經過最優頻段濾波包絡后得到的譜圖圖11中也沒有發現明顯譜線。

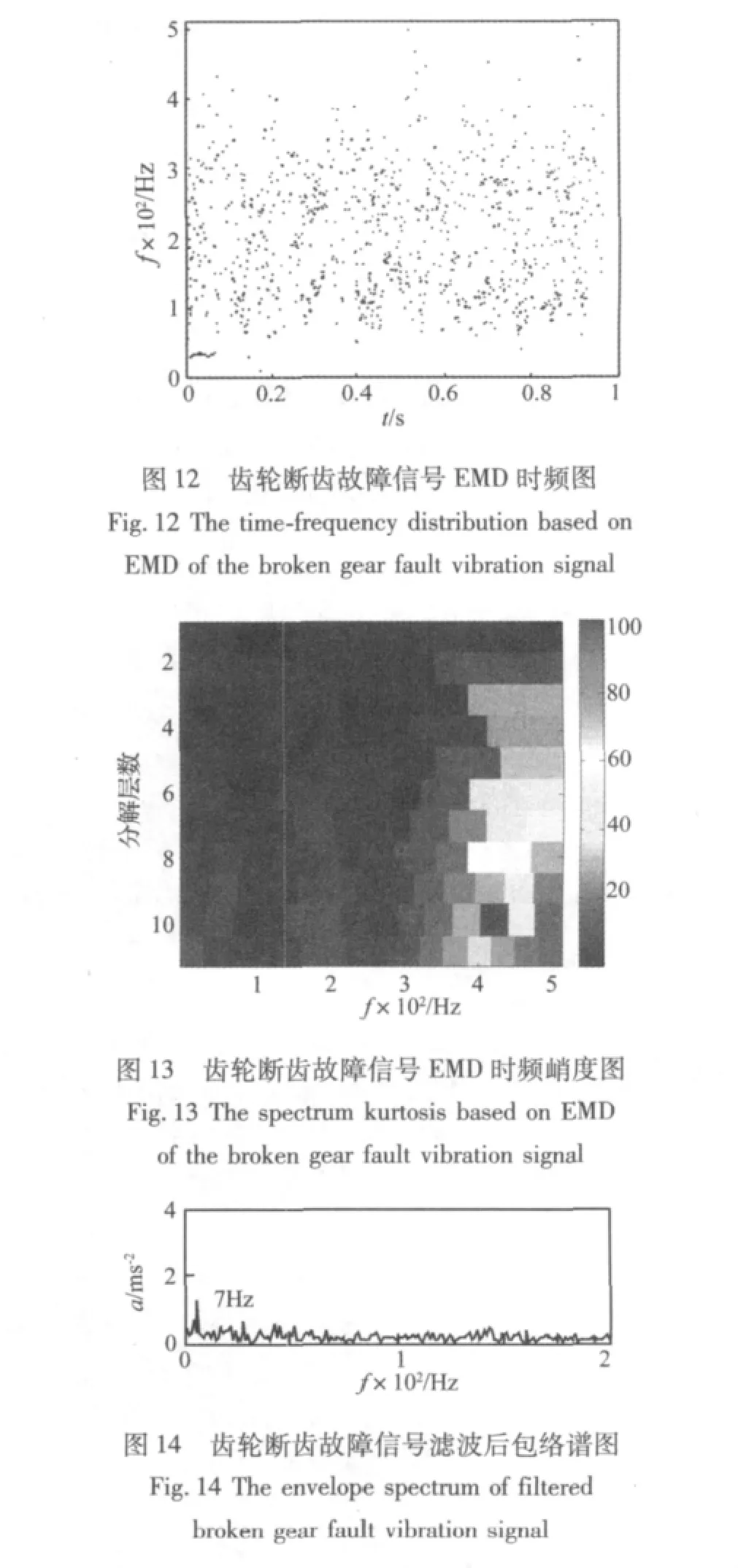
為了證明LMD時頻分析方法與譜峭度方法相結合的優越性,本文用基于EMD時頻分析的譜峭度方法對同一斷齒故障齒輪信號做了對比分析。圖12為斷齒故障信號的EMD時頻分解,圖13為經過EMD時頻分析后得到的峭度圖此時在第10層的第12頻段取得了最大峭度值,以此為濾波頻段對信號進行濾波包絡后得到如圖14所示譜圖,圖中也可以看見在7Hz處存在明顯譜線,但不如圖8突出,證明了基于LMD時頻分析的譜峭度方法在齒輪故障診斷中的優越性。
4 結論
本文介紹了基于LMD時頻分析的譜峭度方法,并將其引用到齒輪故障診斷中。譜峭度方法是基于信號時頻分析提出的,其實質就是計算信號細小頻段甚至每條譜線的峭度值,譜峭度對瞬態信號及其敏感,因此能夠有效地檢測到信號的不平穩性,提取出齒輪信號的故障特征頻段。LMD時頻分析方法相對于其他的常見時頻方法(如STFT,小波變換等)具有更好的自適應性,因此能夠更加真實的顯現出信號的時頻分布。基于LMD時頻分析的譜峭度方法能夠通過峭度最大原則檢測出包含故障特征信息的頻段,對其進行包絡分析后提取出故障特征頻率。結果表明,基于LMD時頻分析的譜峭度方法能夠有效地運用于齒輪故障診斷中。
[1] Nikolaou N G,Antoniadis I A.Demodulation of vibration signals generated by defects in rolling element bearings using complex shifted morlet wavelets[J].Mechanical Systems and Signal Processing,2002,16(4):677-694.
[2] Yiakopoulos C T, Antoniadis I A. Waveletbased demodulation of vibration signals generated by defects in rolling element bearings[J].Shock and Vibration,2002,9(6):293-306.
[3] Parey A,Guillet M E,Tandon N.Dynamic modeling of spur gear pair and application of empirical mode decompositionbased statistical analysis for early detection of localized tooth defect[J].Journal of Sound and Vibration,2006,294(3):547-561.
[4] Cheng J S,Yu D J,Yang Y.The application of energy operator demodulation approach based on EMD in machinery faultdiagnosis[J]. MechanicalSystems and Signal Processing,2007,21(2):668-677.
[5] Dwyer R F.Detection of non-gaussian signals by frequency domain kurtosis estimation[C].Int.Conf.Accoustic,Speech,and Signal Processing,Boston,1983:607-610.
[6] 蔡艷平,李艾華,石林鎖,等.基于EMD與譜峭度的滾動軸承故障檢測改進包絡譜分析[J].振動與沖擊,2011,30(2):167-172.CAI Yan-ping,LI Ai-hua,SHI Lin-suo,et al.Roller bearing fault detection using improved envelope spectrum analysis based on EMD and spectrum kurtosis[J].Vibration and Shock,2011,30(2):167-172.
[7] AntoniJ. The spectral kurtosis:a useful tool for characterizing non-stationary signals[J].Mechanical Systems and Signal Processing,2006,20(2):282-307.
[8] Antoni J.Fast computation of the kurtogram for the detection of transient faults[J].Mechanical Systems and Signal Processing,2007,21(1):108-124.
[9] 王曉冬,何正嘉,訾艷陽.滾動軸承故障診斷的多小波譜峭度方法[J].西安交通大學學報,2010,44(3):77-81.WANG Xiao-dong,HE Zheng-jia, ZIYan-yang. Spectral kurtosis of multiwavelet for fault diagnosis of rolling bearing[J].Journal of Xi’an Jiaotong University,2010,44(3):77-81.
[10] Smith J S.The local mean decomposition and its application to EEG perception data[J].Journal of the Royal Society Interface,2005,2(5):443-454.
[11] 程軍圣,張 亢,楊 宇,等.局部均值分解方法與經驗模式分解的對比研究[J].振動與沖擊,2009,28(5):13-16.CHENG Jun-sheng,ZHANG Kang,YANG Yu,et al.A comparison between the local mean decomposition and the empirical mode decomposition method[J].Vibration and Shock,2009,28(5):13-16.
[12] Yang Y,He Y,Cheng J S,et al.A gear fault diagnosis using Hilbert spectrum based on MODWPT and a comparison with EMD approach[J].Measurement,2009,42(4):542-551.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
