目標高度對廣域多點定位系統(tǒng)精度的影響
2012-09-03 06:00:48何東林吳宏剛徐自勵
電訊技術 2012年10期
關鍵詞:分析
何東林,吳宏剛,王 洪,徐自勵
(1.中國民用航空局第二研究所網(wǎng)絡工程學院,成都 610041;2.電子科技大學電子工程學院,成都6 11731)
1 引 言
廣域多點定位(Wide Area Multilateration,W AM)技術是針對空中航路和終端區(qū)域的一種新型監(jiān)視技術。該技術通過多站接收民航飛機的A/C模式和S模式應答信號,采用到達時間差(Time Difference of Arrival,TDOA)算法,確定空中飛機的位置。現(xiàn)有二次監(jiān)視雷達(Secondary Surveillance Radar,SSR)覆蓋不全,有盲區(qū),且成本高,因此在歐美一些山區(qū)航路和終端區(qū)已安裝了W AM 系統(tǒng)用于飛機監(jiān)視[1]。
WAM系統(tǒng)由多個分布式的地面接收站構成,系統(tǒng)的精度受到各接收站安置幾何分布的影響,即幾何精度稀釋(Geometrical Dilution of Precision,GDOP)問題[2-3]。文獻[4-7]對時差定位的系統(tǒng)定位精度進行了分析,文獻[4]和文獻[5]側重對站點幾何位置對定位精度的影響分析,文獻[6]主要對二維定位解中目標高度引起的誤差進行分析,文獻[7]主要分析了站址測量誤差對系統(tǒng)二維定位精度的影響,文獻[8]研究了多點定位站點優(yōu)選和故障定位方法,文獻[9]主要對如何提高系統(tǒng)定位效率進行了研究。但是上述文獻都沒有針對目標高度不同對WAM定位精度的影響進行分析。
本文考慮實際廣域站點布局的各種情況,對相同高度層和不同目標高度層的系統(tǒng)定位精度進行了分析,得出了水平精度稀釋(Horizontal Dilutionof Precision,HDOP)和垂直精度稀釋(Vertical Dilution of Precision,VDOP)隨高度的變化規(guī)律,最后對同高度層不同站點布局和基線長度對定位精度的影響進行了分析,并由此解決了航路不同高度層條件下WAM系統(tǒng)站點的設計和定位精度保障問題。
2 WAM系統(tǒng)定位精度分析算法
多點定位是一種雙曲線/面定位技術,根據(jù)目標到各站點與參考站點的達到時間差計算目標位置,定位精度與TDOA誤差和站點布局有關,三者的關系為

式中,σs為廣域多點定位系統(tǒng)位置精度,σTDOA為TDOA測距精度,G表示GDOP。GDOP決定了站點布局的設計,并直接影響系統(tǒng)定位精度,因此如何減小GDOP值對控制系統(tǒng)精度非常重要。
首先對到達時間差測量方程組進行描述。假設x=[rxryrz]T為飛機目標的空間位置矢量,xi=[rxiryirzi]T為第 i個廣域多點定位地面接收站的位置矢量,共有N個接收站。對于N個接收站,到達時間測量方程組寫成矩陣形式為

式中,c為信號傳播速度,Tm為信號到達接收站時間的測量值,T0為目標發(fā)射信號的時間,r為目標到接收站的距離,n為測量噪聲。假設測量噪聲均值為零,彼此獨立,則其協(xié)方差矩陣為

廣域多點定位系統(tǒng)采用到達時間差(TDOA)算法進行雙曲線定位,在式(2)中為了消去共同參量T0,用時間差列出時差測量方程組:

式中,i取值為2~N。這里只有(N-1)個時差公式。
用矢量矩陣來表示測量噪聲的差值,有
式中,差分矩陣
則到達時間差的協(xié)方差矩陣為

通過最小二乘法線性估值法,得到時間差測量定位協(xié)方差矩陣為
式中 ,σrx、σry、σrz分別是 x、y 、z 方向上的定位誤差標準差,參考點x0到接收站的單位矢量為
由式(7)和GDOP定義有:

水平位置精度誤差用HDOP來描述:

系統(tǒng)高度精度誤差通過VDOP來描述:

這里,H表示HDOP,V表示VDOP,對于廣域航路和終端區(qū)來說,HDOP控制水平定位精度,VDOP控制垂直定位精度,HDOP和VDOP值越大,表示定位精度越低。下面針對空中飛機,進行HDOP和VDOP的仿真分析。
3 仿真與分析
3.1 同高度層HDOP和VDOP分析
由GDOP算法公式推導可知,GDOP取決于廣域多點定位系統(tǒng)各個接收站的布局和目標位置等。下面對空中航路飛機進行了HDOP、VDOP算法分析,經過算法仿真,得到了不同條件下的仿真結果。廣域多點定位系統(tǒng)4接收站即可進行三維位置解算定位,但在實際運行中考慮系統(tǒng)冗余性和可靠性,一般進行5站同時覆蓋定位。這里我們首先對標準5站布局進行仿真分析。
仿真條件:監(jiān)視區(qū)域選取50 km×50 km區(qū)域,標準5站布局,中間站點坐標為(0,0),周邊4站距中間站點的基線距離都為20 km,測量誤差設置為10 ns,目標高度分別為3 km和8 km。圖1、圖2分別是目標高度3 km和目標高度8 km時5站HDOP結果,圖3、圖4分別是目標高度3 km和目標高度8 km時5站VDOP結果。
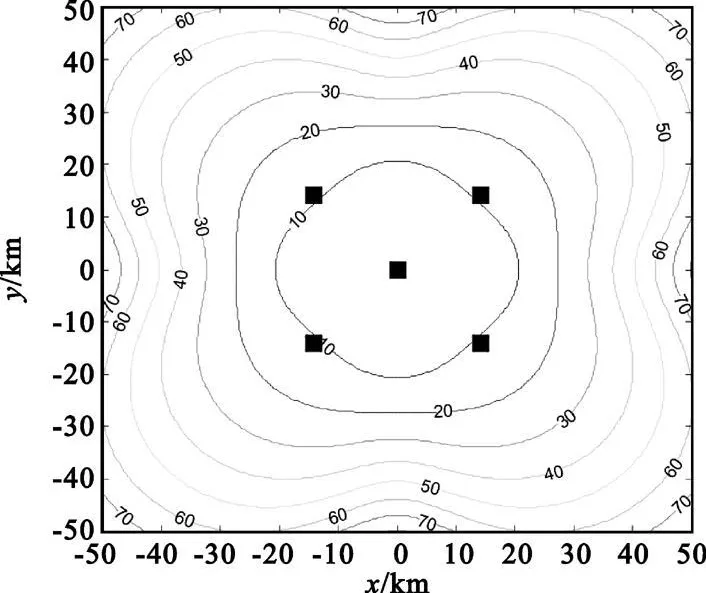
圖1 對稱5站HDOP(高度3 km)Fig.1 HDOP of 5 symmetric stations(3 km height)
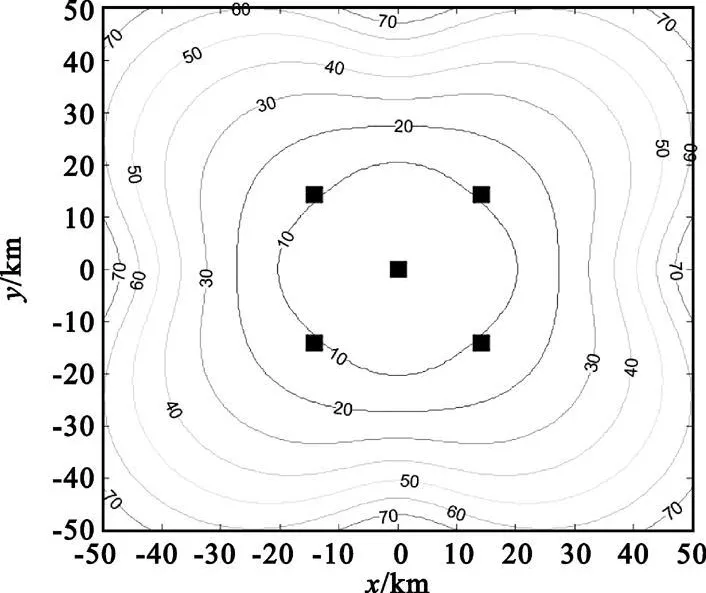
圖2 對稱5站HDOP(高度8 km)Fig.2HDOP of 5 symmetric stations(8 km height)
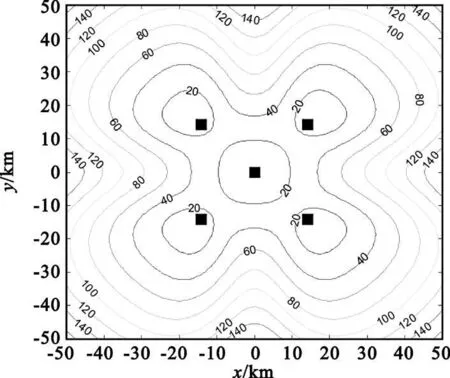
圖3 對稱5站VDOP(高度3 km)Fig.3 VDOP of 5 symmetric stations(3 km height)
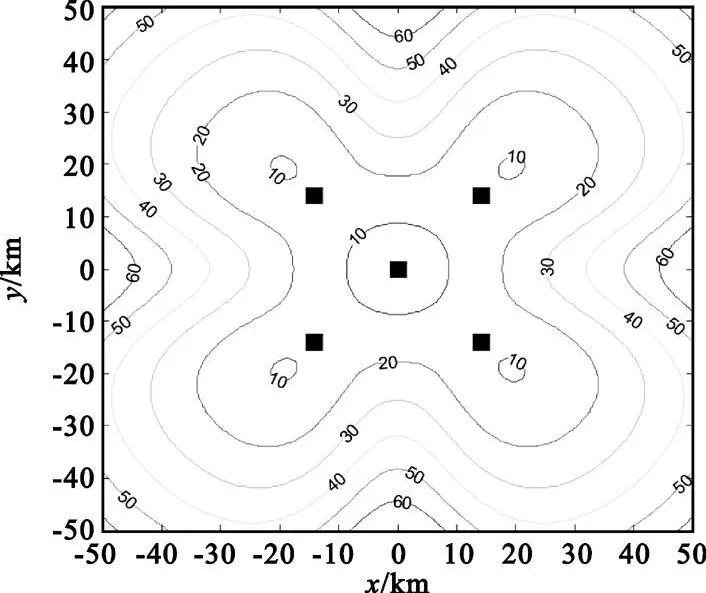
圖4 對稱5站VDOP(高度8 km)Fig.4 VDOP of 5 symmetric stations(8 km height)
經分析可以得出,同目標高度層當高度較低時,HDOP值典型小于VDOP。當目標高度較高時,在接收站點所圍區(qū)域內HDOP小于VDOP,說明廣域多點定位系統(tǒng)定位精度在站點所圍區(qū)域內受垂直定位精度影響較大。在接收站點所圍區(qū)域外兩站開口方向,HDOP小于VDOP;在站點連線延長線上,HDOP大于VDOP。
從圖1和圖2還可以看出,布局固定時不同目標高度層水平定位精度變化不大,但垂直定位精度變化較大。下面將針對上述結果對不同目標高度層時的HDOP和VDOP進行仿真分析。
3.2 高度層變化時HDOP和VDOP結果分析
結合上述同高度層仿真結果,保持仿真條件不變,取標準5站布局站點所圍區(qū)域內點(10,0),所圍區(qū)域外兩站開口延長線點(30,0),以及站點連線延長線點(30,30),作為典型目標位置點進行HDOP和VDOP分析。
圖5的HDOP結果表示了目標高度層變化時系統(tǒng)水平定位精度變化情況,圖6的VDOP結果表示了目標高度層變化時系統(tǒng)垂直定位精度變化情況。可以看出,目標高度變化時水平定位精度變化不大,但垂直定位精度變化較大。在目標高度較低時,垂直定位精度隨著目標高度降低顯著變差,且明顯差于水平定位精度。目標高度較高時垂直定位精度變化不大,在站點所圍區(qū)域內、兩站開口延長線點VDOP值大于HDOP,在站點連線延長線上點VDOP稍小于HDOP。
考慮系統(tǒng)定位精度由水平和垂直定位精度兩部分組成,因此目標高度變化對廣域多點定位系統(tǒng)定位精度影響較大。
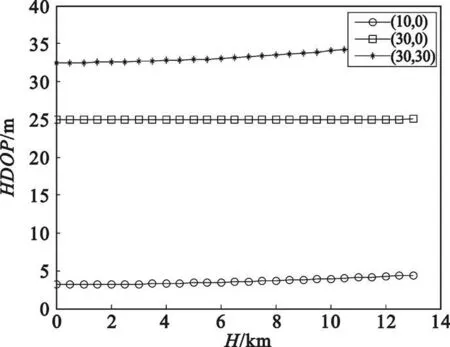
圖5 對稱5站HDOP隨目標高度變化結果Fig.5 HDOP of 5 symmetric stations changedwith target height
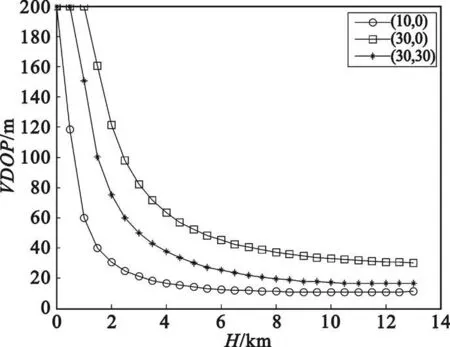
圖6 對稱5站VDOP隨目標高度變化結果Fig.6 VDOP of 5 symmetric stations changed with target height
3.3 不同站點布局、同高度層時VDOP結果分析
從前面分析中可以看出,廣域多點定位系統(tǒng)中目標高度變化時對系統(tǒng)垂直定位精度影響較大,因此下面我們進一步分析在目標高度一定的情況下,改變站點布局和基線長度對系統(tǒng)垂直定位精度的影響。
以兩種典型的4站定位布局為例進行分析。首先設置站點布局為4站對稱和4站星形布局,仿真監(jiān)視區(qū)域仍選取50 km×50 km區(qū)域,站點間基線長度均為20 km,測量誤差設置為10 ns,目標高度設為8 km,其VDOP結果見圖7和圖8。
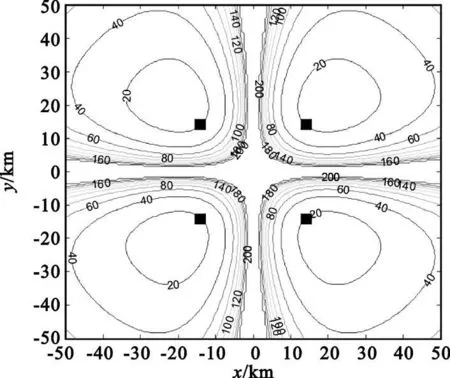
圖7 對稱4站VDOP仿真結果(高度8 km,基線20 km)Fig.7 VDOP of 4 symmetric stations(8 km height,baseline 20 km)
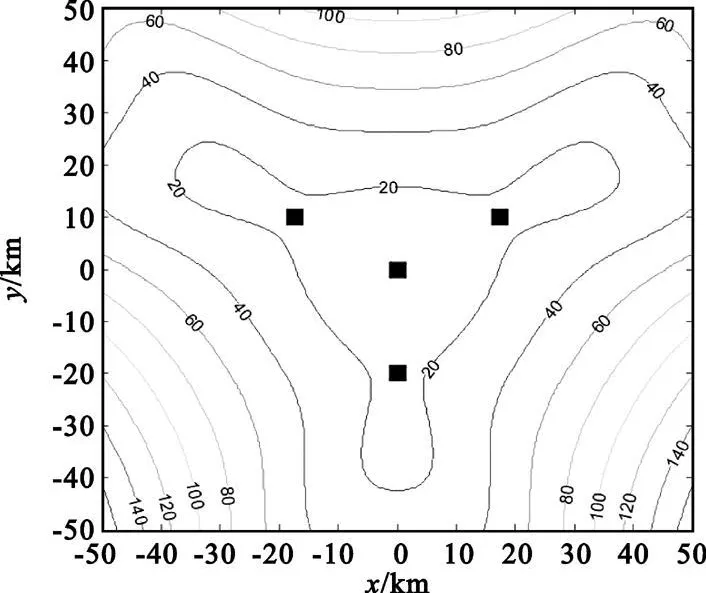
圖8 星形4站VDOP仿真結果(高度8 km,基線20 km)Fig.8VDOP of 4 star stations(8 km height,baseline 20 km)
從圖7中可以看出,4站對稱布局方式,在每兩站開口中心線方向無法有效定位,VDOP存在明顯“十”字發(fā)散現(xiàn)象,該種布局方式實際中不適合采用。而從圖8中看出,4站星形則是一種比較好的布站方式,垂直定位精度有保障,但其缺點是系統(tǒng)冗余度不夠,可靠性較低。因此,在目標高度層不變時,不同站點布局形式可以提高廣域多點定位系統(tǒng)垂直定位精度。
下面我們再對保持高度層不變,調整基線長度對系統(tǒng)定位精度的影響進行分析。圖9是在上述星形布站方式仿真條件基礎上,僅調整基線長度為30 km。可以看出增加基線長度一定程度上提高了廣域多點定位系統(tǒng)的垂直定位精度。
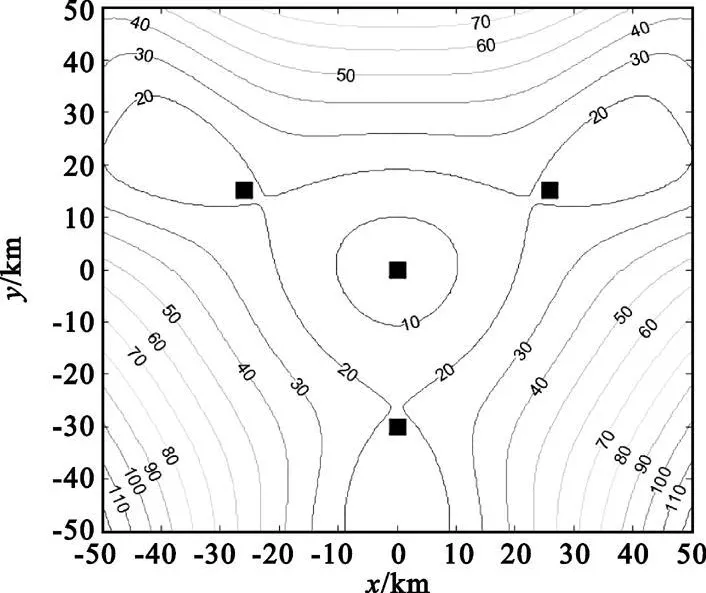
圖9 星形4站VDOP仿真結果(高度8 km,基線30 km)Fig.9 VDOP of 4 star stations(8 km height,baseline 30 km)
在實際外場測試中,為了保證包圍中心區(qū)域的精度,采用了類似星形的布站架構,基線選取為20 km左右,實測定位效果較好。
上述仿真分析均考慮了外場應用情況,仿真基線設置和高度層變化符合實際環(huán)境,在實際外場測試中,也驗證了該分析方法的有效性。
4 結 論
目標高度對廣域多點定位系統(tǒng)定位影響較大,特別是垂直定位精度在高度較低時降低明顯。在高度不變的情況下,適合的布站形狀和基線長度可提高系統(tǒng)定位精度。本文通過針對廣域多點定位系統(tǒng)的不同布局方式,調整目標飛行高度,分析了水平精度稀釋和垂直精度稀釋的變化規(guī)律,結果準確可靠,對實際布局中如何保障系統(tǒng)定位精度具有重要參考價值。
[1] 呂小平.MDS技術在我國民用航空的應用探討[J].空中交通管理,2006,23(9):4-11.LV Xiao-ping.Discussions on the Application of MDS Technology in China Civil Aviation[J].Air Traffic Management,2006,23(9):4-11.(in Chinese)
[2] Yarlagadda R,Ali I,Al-Dhahir N,et al.GPS GDOP metric[J].IEE Radar,Sonar Navigation,2000,147(5):259-264.
[3] 王洪,劉昌忠,汪學剛,等.一種多點定位的目標位置精確解算方法[J].航空學報,2011,32(7):1269-1274.WANG Hong,LIU Chang-zhong,WANG Xue-gang,et al.A target position exact solution method of multilateration[J].Acta Aeronautica et Astronautica Sinica,2011,32(7):1269-1274.(in Chinese)
[4] Sharp I,Kegen Y.GDOP Analysis for Positioning System Design[J].IEEE Transactions on Vehicular Technology,2009,58(7):3371-3382.
[5] 易云清,徐漢林,沈陽.時差定位模型與定位精度分析[J].電子信息對抗技術,2010,25(3):16-20.YI Yun-qing,XU Han-lin,SHEN Yang.Analysis of TDOA Location Model and Location Precision[J].Electronic Information Warface Technology,2010,25(3):16-20.(in Chinese)
[6] 馮富強,楊黎都,陳永光.目標高度對三站時差定位精度的影響[J].電子對抗技術,2005,20(2):14-16.FENG Fu-qiang,YANG Li-du,CHEN Yong-guang.The Influence of Target Altitude on Accuracy of Tri-Station TDOA Location System[J].Electronic Warfare Technology,2005,20(2):14-16.(in Chinese)
[7] 趙琨,何青益.基于GDOP的三站時差定位精度分析[J].無線電工程,2012,42(5):15-17.ZHAO Kun,HE Qing-yi.Analysis of Location Precision in Tri-station TDOA Location System with GDOP[J].Radio Engineering of China,2012,42(5):15-17.(in Chinese)
[8] 吳宏剛,劉昌忠,黃忠濤.機場場面多點定位系統(tǒng)遠端站優(yōu)選方法[J].電訊技術,2009,49(12):5-8.WU Hong-gang,LIU Chang-zhong,HUANG Zhong-tao.Multilateration Sation Selection Method for Airport Surface Surveillance[J].Telecommunication Engineering,2009,49(12):5-8.(in Chinese)
[9] 劉軍,解嘉宇,郭繼周.多基地雷達馬氏定位算法優(yōu)化[J].電訊技術,2010,50(7):97-100.LIU Jun,XIE Jia-yu,GUO Ji-zhou.Optimization of Markov Estimation Algorithm for Multistatic Radar Positioning[J].Telecommunication Engineering,2010,50(7):97-100.(in Chinese)
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
財經界(學術版)(2015年20期)2015-12-23 09:20:13
中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
