提高脈沖激光近炸引信定距精度的研究
2012-08-27 08:16:08趙忠偉張玉鈞倪家正
電光與控制 2012年12期
趙忠偉, 張玉鈞, 周 權, 沈 超, 倪家正
(脈沖功率激光技術國家重點實驗室(電子工程學院),合肥 230037)
0 引言
提高炸點控制精度是引信特別是近炸引信發展的一個永恒主題,而提高炸點控制精度關鍵在于對目標的精確定距和起爆點位置的精確控制,激光引信能精確控制起爆點的位置[1-2],所以對激光引信實現較高的距離判別精度有著重要意義。
目前,由于激光引信對體積、重量和功耗有著苛刻的要求,所以激光引信主要采用脈沖測距的方法進行距離判別[3-4]。根據脈沖激光測距的原理可知,影響測距的因素主要有起止脈沖信號時刻的判別和時間間隔的測量。國內外目前在脈沖激光引信中,主要采用縮短發射激光的脈沖寬度來提高引信的測距精度[5-6],雖然這種方案能提高引信測距精度,但對于發射機和接收機的帶寬卻提出了更高的要求,引信功耗也隨之加大,因此,本文設計了可在原有發射機和接收機的條件下提高脈沖激光引信測距精度的時刻判別和時間間隔測量電路。
1 時刻判別電路設計
時刻鑒別單元的主要作用是對放大電路的輸出信號進行實時監測,為系統產生起始信號和結束信號,其性能直接影響著測時精度和系統的距離分辨率。目前常用的方法有前沿時刻鑒別、恒定比值時刻鑒別法和高通容阻法[7]。前沿時刻鑒別容易實現,但是漂移誤差較大,無法滿足高精度測量的應用;恒定比值時刻鑒別能夠克服前沿時刻鑒別的缺點,減小漂移誤差,提高測量精度,但是其需要得到一個精確到納秒量級的延遲,這是很難實現的,系統的復雜度也會增加:所以本文在高通容阻的原理上設計了有源CR雙閾過零時刻判別電路。其原理如圖1所示。
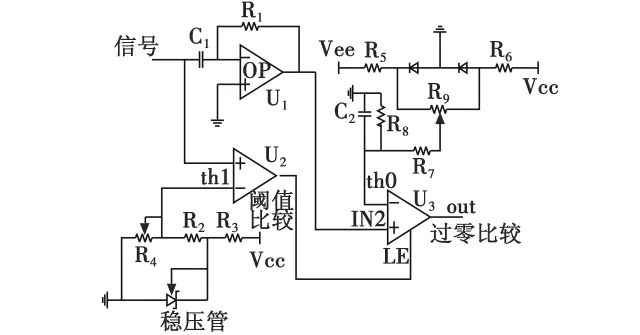
圖1 有源CR雙閾過零時刻判別原理圖Fig.1 The active CR double threshold zero-crossing timing discriminating circuit
由圖1可知,放大后的信號分為兩路,一路經過C1、R1和放大器U1構成的有源CR微分電路,由單極性脈沖信號變為雙極性信號,輸出到過零比較器U3;另一路輸入到閾值比較器U2進行閾值比較,只有當信號大于閾值時,才確定信號有效,輸出高電平到U3的使能端口LE,使U3處于比較狀態,避免了因噪聲和干擾信號引起過零比較器的誤觸發。當U3處于比較狀態時,雙極性信號經過U3,與零閾值進行比較,輸出所需的脈沖信號。整個電路的時序如圖2所示。
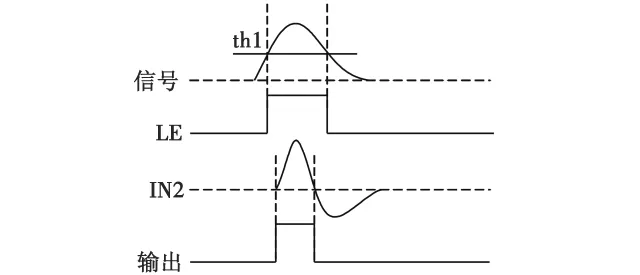
圖2 時刻判別電路時序圖Fig.2 The time sequence of discriminating circuit
為了減小誤差,避免電源電壓波動或者噪聲等造成的比較器閾值電平飄移,在比較器U2中采用穩壓管穩定閾值th1,電位器R4用來調整閾值大小;在U3中采用兩只二極管串聯來穩定零電平,并且為了得到穩定的閾電壓,對電位器R9輸出的電壓進行了衰減和濾波,減少了噪聲和外部干擾的影響。
2 時間間隔測量原理
脈沖激光引信測距的工作原理是通過測定脈沖光波在測線上往返所經歷的時間,按照式(1)求出距離值,即脈沖飛行時間法[8]。

式中:D為被測距離;c為光速;t為脈沖光波在測線上往返經歷的時間間隔,即飛行時間。在激光引信中,測距的時序如圖3所示。
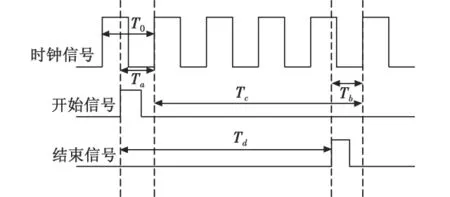
圖3 脈沖激光引信測距的時序圖Fig.3 Time sequence diagram of pulse laser fuze ranging
從圖3中可以看出,由開始信號到結束信號的真實時間間隔為Td,而若采用簡單的直接計數法得到的測量結果為Tc,存在極大的誤差。目前,脈沖測距時間測量方法有模擬法[9]、數字法和數字插入法。數字插入法是在數字法的基礎上,通過插入法提高測量精度,包括延遲線插入法、時幅轉換插入法和時間放大插入法。數字插入法繼承了數字法測量范圍大和線性好的優點,又實現了高精度的時間測量,因此,為了精確測量開始信號和回波信號的時間間隔,本文選擇具有結構簡單、測量重復頻率高、易于單片集成和精度高等優點的FPGA延遲線插入法進行高精度時間間隔的測量。
在本設計中,時間間隔的測量包括“粗”時間測量和“細”時間測量兩部分,其主要結構如圖4所示。
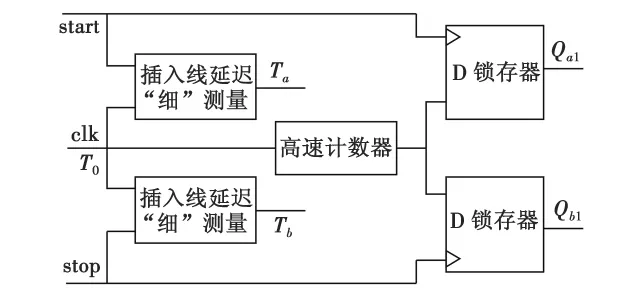
圖4 時間間隔測量的主要結構Fig.4 Main architecture of time-interval measurement
“粗”時間測量,就是直接計數法,通過一個高速計數器和兩個鎖存器來實現,以時鐘周期為基準,開始信號和回波信號為計數開門和關門的鎖存信號,鎖存住激光開始信號start和回波信號stop到達時的計數值,根據計數器的時鐘周期T0算出“粗”時間Tc;兩路延遲線構成“細”時間測量電路,用來測量開始或回波信號與時鐘上升沿之間的時間間隔Ta和Tb,最后得到開始和回波信號之間的時間間隔Td。

假設計數器和兩個鎖存器位寬為N,開始信號的鎖存器Qa鎖存的計數值為Qa1,回波信號的鎖存器Qb鎖存的計數值為Qb1,則開始信號和回波信號之間的計數間隔Q△可表示為

假設延遲線每個單元的延時時間為Tr,主波信號延遲線和回波信號延遲線編碼器的輸出分別為Na、Nb,計算可得Ta和Tb。

由式(2)~式(4)可得Td為

由以上分析可知,在計數時鐘穩定的條件下,FPGA延遲線插入法測量時間間隔的精度取決于延遲單元的精度Tr。
3 時間間隔測量電路設計
3.1 延遲線插入法
在FPGA中實現延遲線插入法有很多種,本文利用FPGA內部專用進位鏈來實現時間內插,以便得到較高的測時分辨率[10-11]。使用加法器將進位單元級聯起來形成一條對輸入信號的時間內插延遲線,實現時間內插電路,進位鏈構成延遲線的示意如圖5所示,其中,A為被加數、B為加數,Sum為和,C為進位數,S為回波信號。
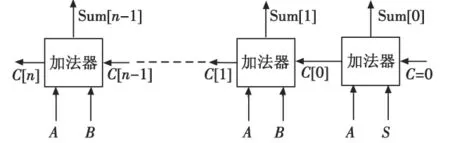
圖5 進位鏈構成延遲線示意圖Fig.5 Schematic diagram of delay-line formed by carry-in chain
設置所有的A為1,B除最低位外都為0,加數的最低位作為開始或回波信號S的輸入。這樣,當外部沒有輸入信號時,S為0,所有輸出Sum都為1,進位鏈上沒有信號傳播;當外部有輸入信號時,S為1,加法器的最低位加法公式就是A+S+C=1+1+0,和數Sum[0]為0,進位信號為1。這樣,輸入信號沿著進位鏈的每級專用進位連線一級級地傳輸,輸入信號被延遲線延遲的信息可以通過加法器的輸出信號顯示出來。
3.2 電路設計
通過對大量FPGA芯片性能的研究,本文選用Xilinx公司的XC2V250-6CS144I器件來實現 Td的精確測量。該器件內部最高時鐘可達420 MHz,延遲進位鏈延時單元延時時間為82 ps,可以實現高速計數、高時間分辨率、響應速度快的TDC電路,其電路功能框圖如圖6所示。
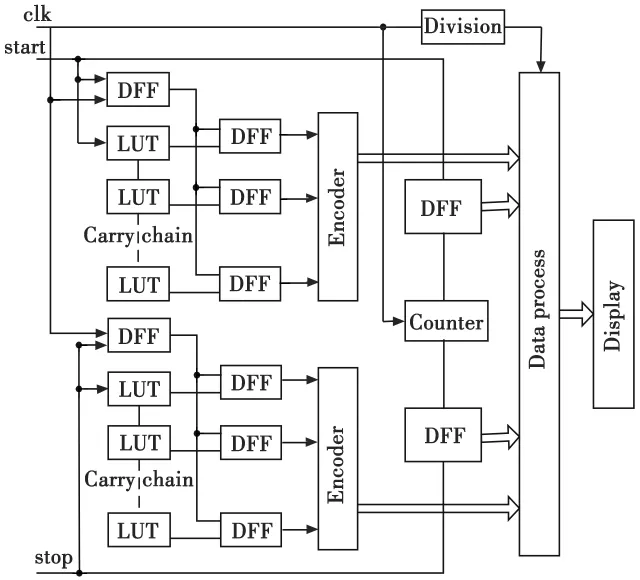
圖6 FPGA實現時間間隔測量電路功能框圖Fig.6 Graph of time-interval measurement circuit in FPGA
由圖6可知,時間間隔測量電路主要包括高速計數器、延遲進位鏈、鎖存器、D觸發器和編碼器。其中:高速計數器采用400 MHz的時鐘計數進行“粗”測量,測得Tc;延遲進位鏈包括開始信號start和回波信號stop兩路延遲線路,而且要求每一路延遲線路總的延遲時間大于高速計數器的時鐘周期2.5 ns,所以每一路延遲線路的延遲單元不少于31個,為了確保延遲電路的有效性,每一路延遲線路的延遲單元設為48個;鎖存器采用400 MHz時鐘同步的開始信號和回波信號進行鎖存;D觸發器,用來完全一致地鎖存輸入信號沿進位鏈傳輸的時間延遲信息;編碼器是將延遲進位鏈的48位二進制碼轉換為十進制碼。最后,各路信息匯總到信號處理單元,計算出測量的距離,再輸出到顯示器進行顯示。
4 實驗結果及分析
根據以上提高測距精度的方法,設計了一套脈沖激光引信系統,如圖7所示,包括發射系統(半導體激光器驅動電路,半導體激光器和發射透鏡),接收系統(接收透鏡,探測器,前放電路,主放電路和時刻鑒別電路),時間測量電路和數據處理4個部分。
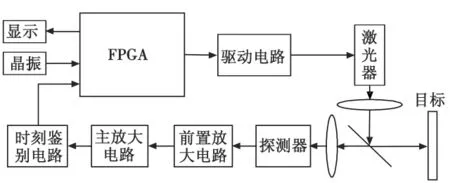
圖7 脈沖激光引信系統框圖Fig.7 Graph of pulse laser fuze structure
系統中半導體激光器選用PGAS1S12,采用溫度補償激光二極管控制器X9530構成的驅動電路,接收電路中選用三極管BFR92構成雙極晶體管型的跨阻式前置放大電路,主放大器AD8047構成增益控制電路,時刻判別電路中選用運放AD8047組成有源CR電路,高速比較器AD96687用來雙閾比較和時刻判定,FPGA進行時間間隔測量和最后的信號處理。
完成以上系統后,進行實驗測量,由于信號經過接收系統各器件會產生延遲,所以需要對系統進行校正,校正后進行實驗,目標放于距離系統的3~10 m之間,每個位置測量5次,得到數據如表1所示。
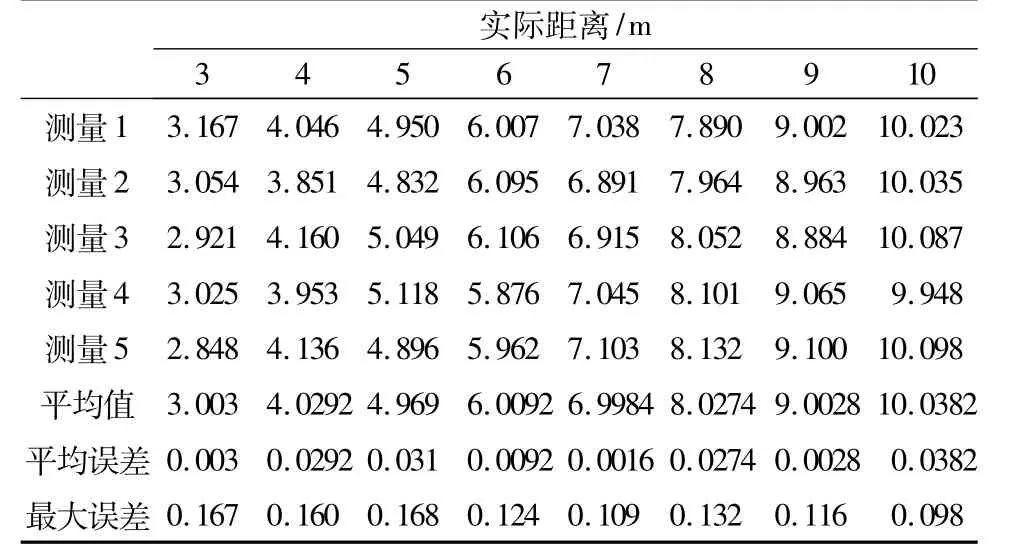
表1 近距離測量結果Table 1 Measure results in small range
從表1可以看出,單次測量最大誤差小于0.170 m,多次測量平均誤差小于0.040 m,結果表明,通過多次求平均后可以減小隨機誤差的影響。從結果中也可以看出,系統產生的誤差不僅僅來自于時間間隔測量電路中延遲單元Tr,還有時鐘晶振的抖動導致的“粗”計數部分出現的誤差,以及時刻判別電路中高速比較器存在的傳輸延時分散性誤差。因此造成單次測量結果誤差偏大,但平均誤差很小,證明了本系統滿足設計需要,所設計的時刻鑒別電路和時間間隔測量電路提高了脈沖激光引信的定距精度。
5 結論
根據高通容阻的原理和脈沖激光引信的特點,設計了雙閾過零時刻判別電路和基于FPGA延遲線插入法的時間間隔測量電路,滿足了在不增加脈沖激光引信系統功耗、體積和重量的前提下,有效地提高了系統定距的精度。實踐表明,該電路應用于脈沖激光近炸引信測距系統中可實現0.17 m的定距精度,滿足實際需要。
[1] 崔占忠,宋世和.近炸引信原理[M].北京:北京理工大學出版社,2009:1-6.
[2] 李大社,劉淑娥,劉晶.激光自適應引信的設計[J].電光與控制,2006,13(2):69-72.
[3] 馮國旭,常保成.高精度激光測距技術研究[J].激光與紅外,2007,37(11):9-12.
[4] 施坤林,黃崢,馬寶華,等.國外引信技術發展趨勢分析與加速發展我國引信技術的必要性[J].探測與控制學報,2005,27(3):1-5.
[5] FARDI B,SCHEUNERT U,CRAMER H,et al.Multi-modal detection and parameter-based tracking of road borders with a laser scanner[C]//IEEE,2003:95-99.
[6] 桑會平,鄧甲昊,胡秀娟.脈沖激光引信微弱回波信號數字檢測技術研究[J].兵工學報,2007,28(4):420-424.
[7] 陳千頌,楊成偉,潘志文,等.激光飛行時間測距關鍵技術進展[J].激光與紅外,2002,32(1):7-10.
[8] JIN K C,MOON M K.TDC module for time-of-flight[C]//IEEE Nuclear Science Symposium Conference Record,Honolulu,HI,Oct.26-Nov.3,2007:761-764.
[9] 潘繼飛,姜秋喜,畢大平.模擬內插法及其測量誤差分析[J].電光與控制,2007,14(1):147-151.
[10] ALOISIO A,BRANCHINI P,CICALESE R,et al.FPGA implementation of a high-resolution time-to-digital converter[C]//IEEE Nuclear Science Symposium Conference Record,Honolulu,HI,Oct.26-Nov.3,2007:504-507.
[11] SONG Jian,AN Qi.A high-resolution time-to-digital converter implemented in field programmable gate arrays[J].IEEE Transactions on Nuclear Science(S0018-9499),2006,53(1):236-237.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00