基于擴(kuò)展卡爾曼濾波器的航天器姿控飛輪故障診斷
2012-08-12 18:06:25吳紅芳
航天控制 2012年3期
吳紅芳 王 志
1.中國(guó)空空導(dǎo)彈研究院,洛陽(yáng) 4710092.西安工業(yè)大學(xué)計(jì)算機(jī)學(xué)院,西安 710032
?
基于擴(kuò)展卡爾曼濾波器的航天器姿控飛輪故障診斷
吳紅芳1王 志2
1.中國(guó)空空導(dǎo)彈研究院,洛陽(yáng) 4710092.西安工業(yè)大學(xué)計(jì)算機(jī)學(xué)院,西安 710032

將未知輸入卡爾曼濾波器擴(kuò)展到非線性系統(tǒng),并將其應(yīng)用于檢測(cè)航天器飛輪出現(xiàn)的早期漸變型故障,以提高故障檢測(cè)的及時(shí)性,避免重大事故的發(fā)生。通過構(gòu)造一組結(jié)構(gòu)化殘差實(shí)現(xiàn)故障分離,采用Wald序列檢測(cè)方法處理濾波殘差,最后給出故障判斷邏輯。仿真結(jié)果驗(yàn)證了結(jié)論的有效性。
姿控飛輪;故障診斷;卡爾曼濾波;Wald序列
姿態(tài)軌道控制系統(tǒng)是航天器最復(fù)雜也是發(fā)生故障最多的分系統(tǒng)。根據(jù)文獻(xiàn)[1]的一項(xiàng)調(diào)查顯示,姿軌控分系統(tǒng)故障占航天器所有發(fā)生故障的30%以上。由于轉(zhuǎn)動(dòng)部件的存在,飛輪是姿軌控分系統(tǒng)中故障發(fā)生率最高的部件之一。最近幾年,在航天器姿態(tài)控制系統(tǒng)執(zhí)行器故障診斷領(lǐng)域已經(jīng)取得了一些成就。文獻(xiàn)[2]提出了航天器反作用輪的故障檢測(cè)與診斷方法,采用狀態(tài)空間逼近法,研究了非線性參數(shù)神經(jīng)網(wǎng)絡(luò)故障識(shí)別。文獻(xiàn)[3]研究了一種航天器冗余反作用輪模型的故障檢驗(yàn)與診斷,采用一組檢測(cè)濾波器來檢測(cè)故障。另外,基于專家系統(tǒng)的故障診斷技術(shù)也得到廣泛的研究。
非線性系統(tǒng)的故障診斷和故障診斷的魯棒性都是當(dāng)前故障診斷研究中的熱點(diǎn)和難點(diǎn)問題。作為一類構(gòu)造簡(jiǎn)單、通用性強(qiáng)的非線性狀態(tài)估計(jì)器,擴(kuò)展卡爾曼濾波器(Extended Kalman Fitering,EKF)無論是在理論研究,還是實(shí)際應(yīng)用中,都受到了廣泛的重視。對(duì)于魯棒故障診斷,一種熟知的方法是未知輸入觀測(cè)器(Unknown Input Observer,UIO),其基本思想是利用Luenberg觀測(cè)器設(shè)計(jì)中富裕的自由度,使其輸出對(duì)于未知輸入(擾動(dòng)、建模不確定等)解耦,從而實(shí)現(xiàn)魯棒性的要求[4-5]。在線性未知輸入觀測(cè)器的基礎(chǔ)上,Kitanidis對(duì)帶未知擾動(dòng)的線性隨機(jī)系統(tǒng)的無偏最小方差估計(jì)也進(jìn)行了研究,稱之為未知輸入卡爾曼濾波器[6](Unknown Input Kalman Fitering,UIKF)。
本文通過結(jié)合EKF和UIKF算法,得到對(duì)帶未知擾動(dòng)的非線性系統(tǒng)的濾波算法,即未知輸入擴(kuò)展卡爾曼濾波(Unknown Input EKF,UIEKF),并將其應(yīng)用于航天器飛輪的早期漸變型故障檢測(cè),為姿控系統(tǒng)重構(gòu)提供信息,避免造成重大事故。
1 數(shù)學(xué)模型及故障描述
根據(jù)剛體姿態(tài)動(dòng)力學(xué)及運(yùn)動(dòng)學(xué)原理,航天器在本體坐標(biāo)系中描述的姿態(tài)動(dòng)力學(xué)為
(1)
其中,I=diag{Ix,Iy,Iz}為航天器主軸轉(zhuǎn)動(dòng)慣量矩陣;ωx,ωy,ωz為航天器慣性角速度在本體坐標(biāo)系中的投影;Lx,Ly,Lz為航天器輸入力矩,由3個(gè)正交飛輪提供。為方便起見,將動(dòng)力學(xué)方程簡(jiǎn)記為

(2)
由于長(zhǎng)期連續(xù)不斷地作機(jī)械運(yùn)動(dòng),因此飛輪是姿軌控分系統(tǒng)中故障發(fā)生率最高的部件之一。由于摩擦力矩增大等原因,飛輪會(huì)出現(xiàn)漸變型故障。這類故障在早期階段,很難檢測(cè)得到,隨著時(shí)間的增加,動(dòng)量輪故障逐漸明顯,會(huì)影響平臺(tái)的正常姿態(tài)。因此對(duì)這類故障應(yīng)在其造成嚴(yán)重影響之前診斷出來,進(jìn)行重構(gòu)。為簡(jiǎn)單起見,本文僅考慮偏差型故障,即
(3)
其中,ρi(t)為偏差型故障指示器,ρi(t)≠0表明第i個(gè)執(zhí)行器發(fā)生偏差型故障。于是故障系統(tǒng)記為

(4)
2 UIEKF算法
將方程(2)離散化,并考慮擾動(dòng)與未建模等因素,得到航天器離散化的模型
(5)
其中,yk∈Rm是測(cè)量向量,dk∈Rq是未知輸入,用來表示系統(tǒng)的未知擾動(dòng)及建模不確定性。系統(tǒng)噪聲和測(cè)量噪聲都是零均值的高斯白噪聲,其協(xié)方差矩陣分別是Qk,Rk,f(xk,uk),h(xk+1,uk+1),E(xk),均由平滑的非線性函數(shù)組成。
假定1 未知輸入的分布矩陣EkE(xk)是列滿秩的;并且?H=?h/?x,?Ek滿足
rank(HkEk)=rank(Ek)=q
則對(duì)于系統(tǒng)(5)的UIEKF算法如下:
(6-1)
(6-2)
(6-3)
(6-4)
其中
(6-5)
(6-6)
(6-7)
(6-8)
(6-9)

UIEKF算法與擴(kuò)展卡爾曼濾波器的不同之處在于: UIEKF的主要變化就是增益陣Lk+1及濾波后的狀態(tài)誤差協(xié)方差陣Pk+1|k+1在EKF的結(jié)果上進(jìn)行了修正,而修正項(xiàng)與未知輸入的分布矩陣Ek直接相關(guān)。由假定1,Lk+1滿足擾動(dòng)解耦的約束條件[6]
(7)
它保證如上濾波器得到的狀態(tài)估計(jì)是無偏的,且最終的狀態(tài)誤差協(xié)方差陣比EKF濾波器的大。
3 故障分離策略與殘差處理
基于UIEKF算法,本節(jié)給出航天器故障的魯棒故障檢測(cè)與分離策略。考慮方程(5),帶故障的航天器模型被表示為
(8)
這里考慮了觀測(cè)方程。
故障分離則通過構(gòu)造一組結(jié)構(gòu)化殘差實(shí)現(xiàn),這組殘差里每個(gè)殘差均對(duì)故障的一個(gè)子集靈敏而對(duì)剩余的故障魯棒。一種最常用的結(jié)構(gòu)化殘差設(shè)計(jì)方案如下[7]:總共設(shè)計(jì)3個(gè)UIEKF(與已知故障維數(shù)相同),每個(gè)UIEKF對(duì)其中一維故障及所有擾動(dòng)解耦,而對(duì)其余2維故障靈敏,即對(duì)如下系統(tǒng)(9)分別設(shè)計(jì)3個(gè)用于故障分離的UIEKF:
(9)

(10)
由γi與γj(i≠j)之間的相互獨(dú)立性及正態(tài)分布特性,可得
(11)
式(11)可進(jìn)一步簡(jiǎn)化為
(12)
根據(jù)給定誤報(bào)率α和漏報(bào)率β來確定2個(gè)門限值,即
則決策律為
(13)
根據(jù)所有3個(gè)UIEKF的決策結(jié)果,由如下的判斷邏輯得到故障分離結(jié)果,即
(14)
4 數(shù)值仿真與結(jié)論
某航天器主要的物理參數(shù)給定如下
I=[5247.97,-230.52,115.30;-230.52,5110.05,41.11;115.30,41.11,4142.48]
2個(gè)協(xié)方差矩陣分別為:
V=diag[0.002,0.002,0.002] ,
W=diag[0.01,0.02,0.03]。
采樣周期為0.02s。
設(shè)定在第50個(gè)與第200個(gè)采樣點(diǎn)之間,第2飛輪發(fā)生緩變?cè)鲆嫘凸收希收现禐椋?/p>
仿真結(jié)果如圖1~圖6。
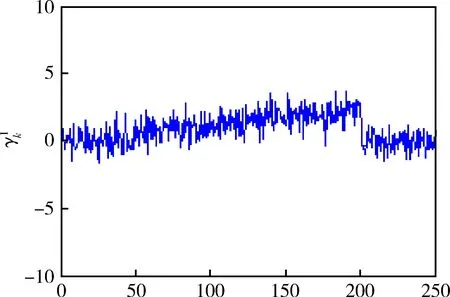
圖1 第1個(gè)UIEKF的殘差曲線
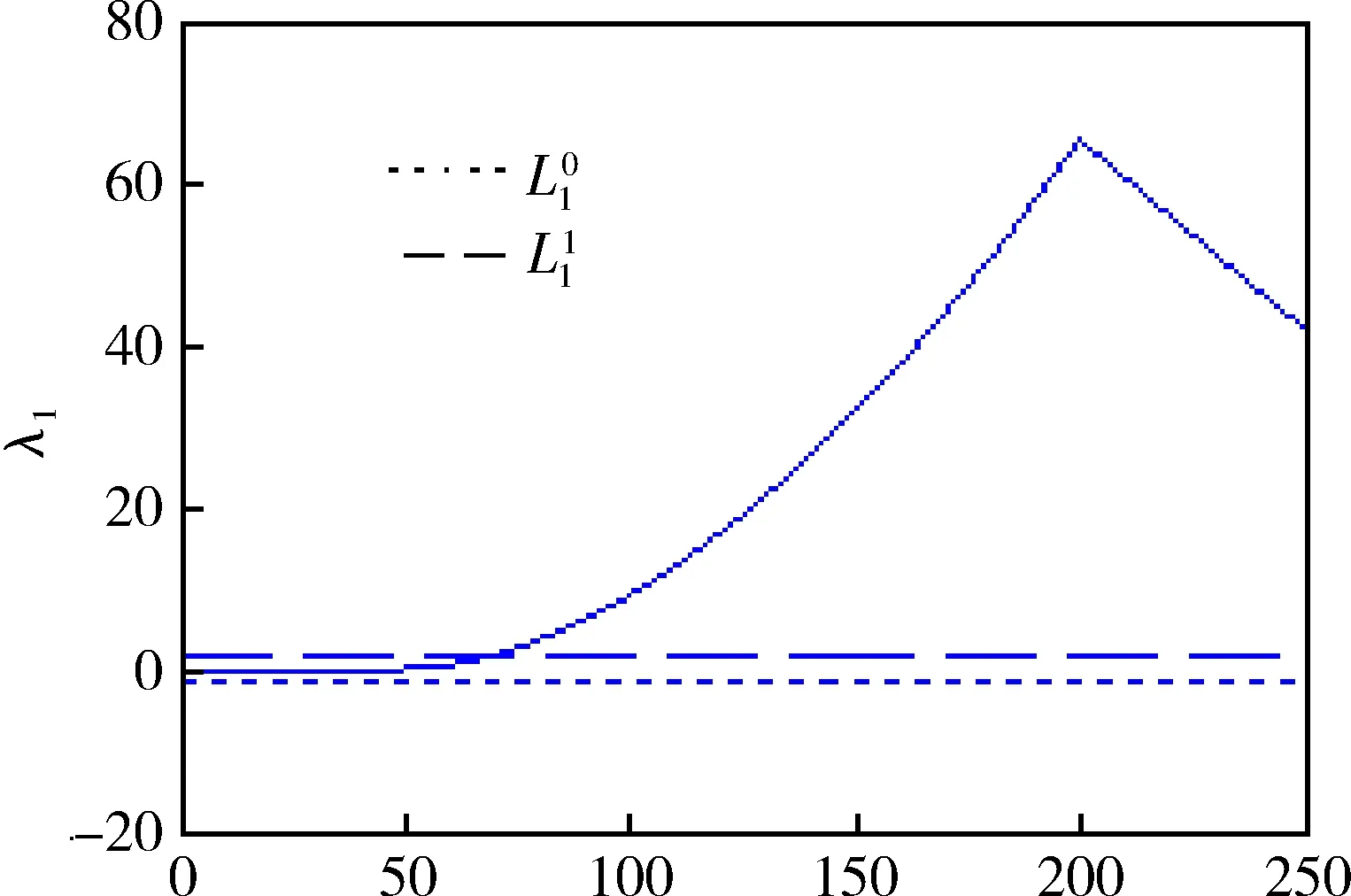
圖2 第1個(gè)UIEKF的判決曲線與門限值
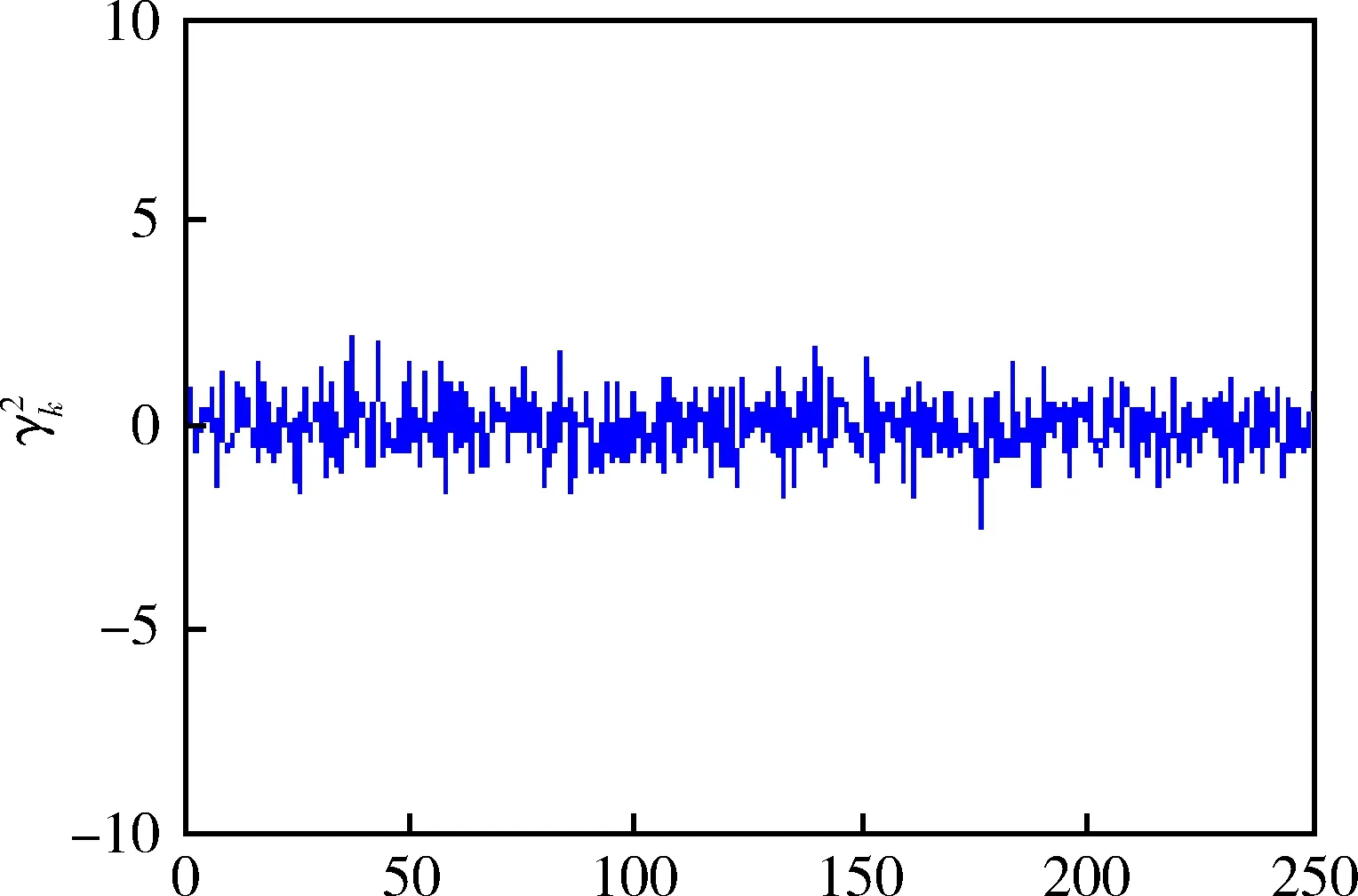
圖3 第2個(gè)UIEKF的殘差曲線
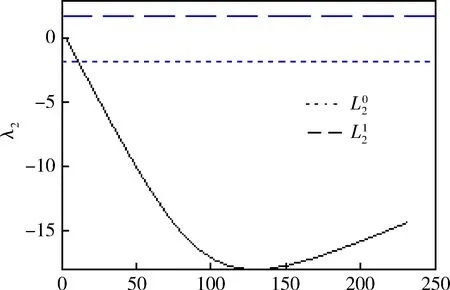
圖4 第2個(gè)UIEKF的判決曲線與門限值
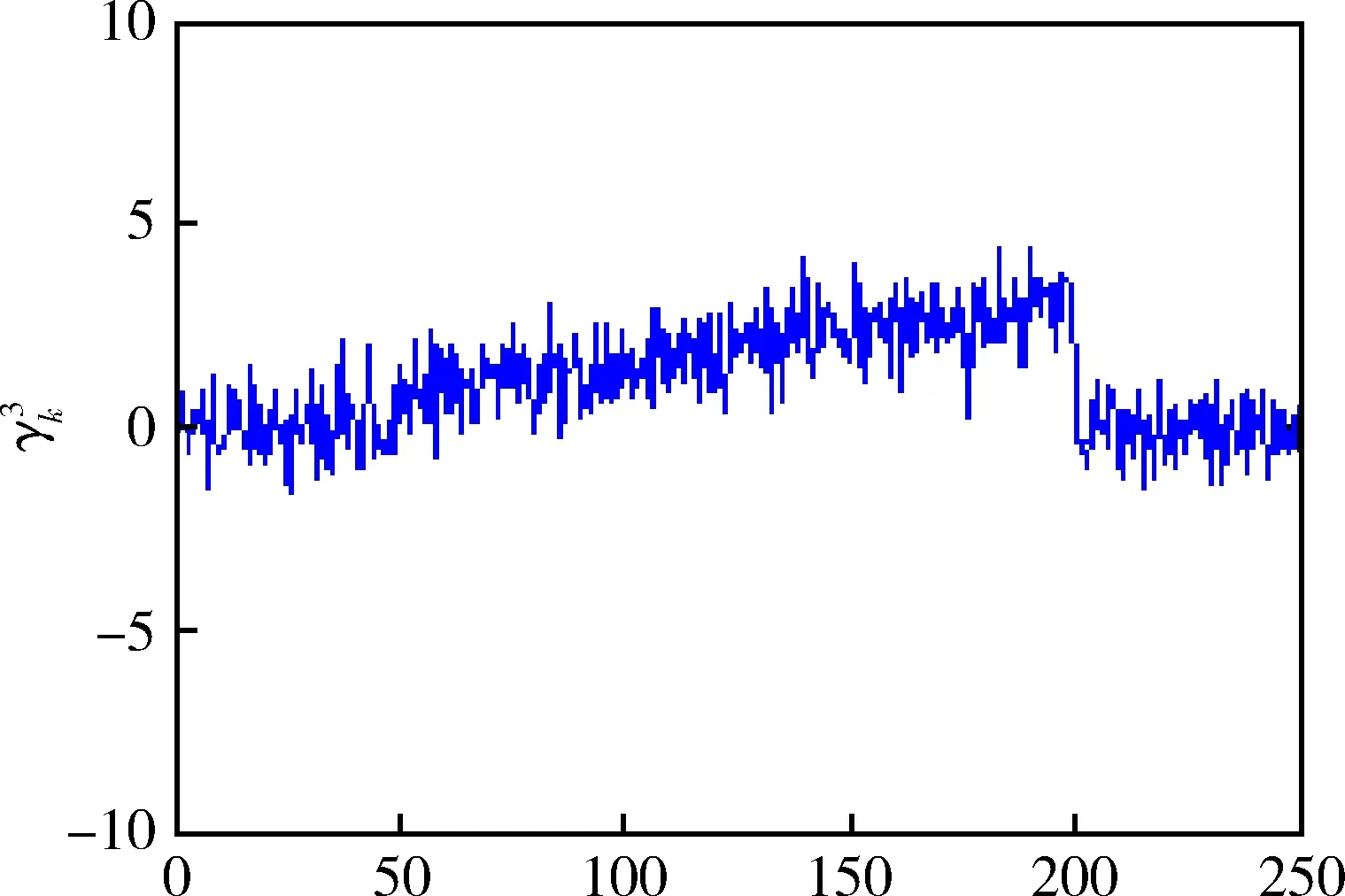
圖5 第3個(gè)UIEKF的殘差曲線
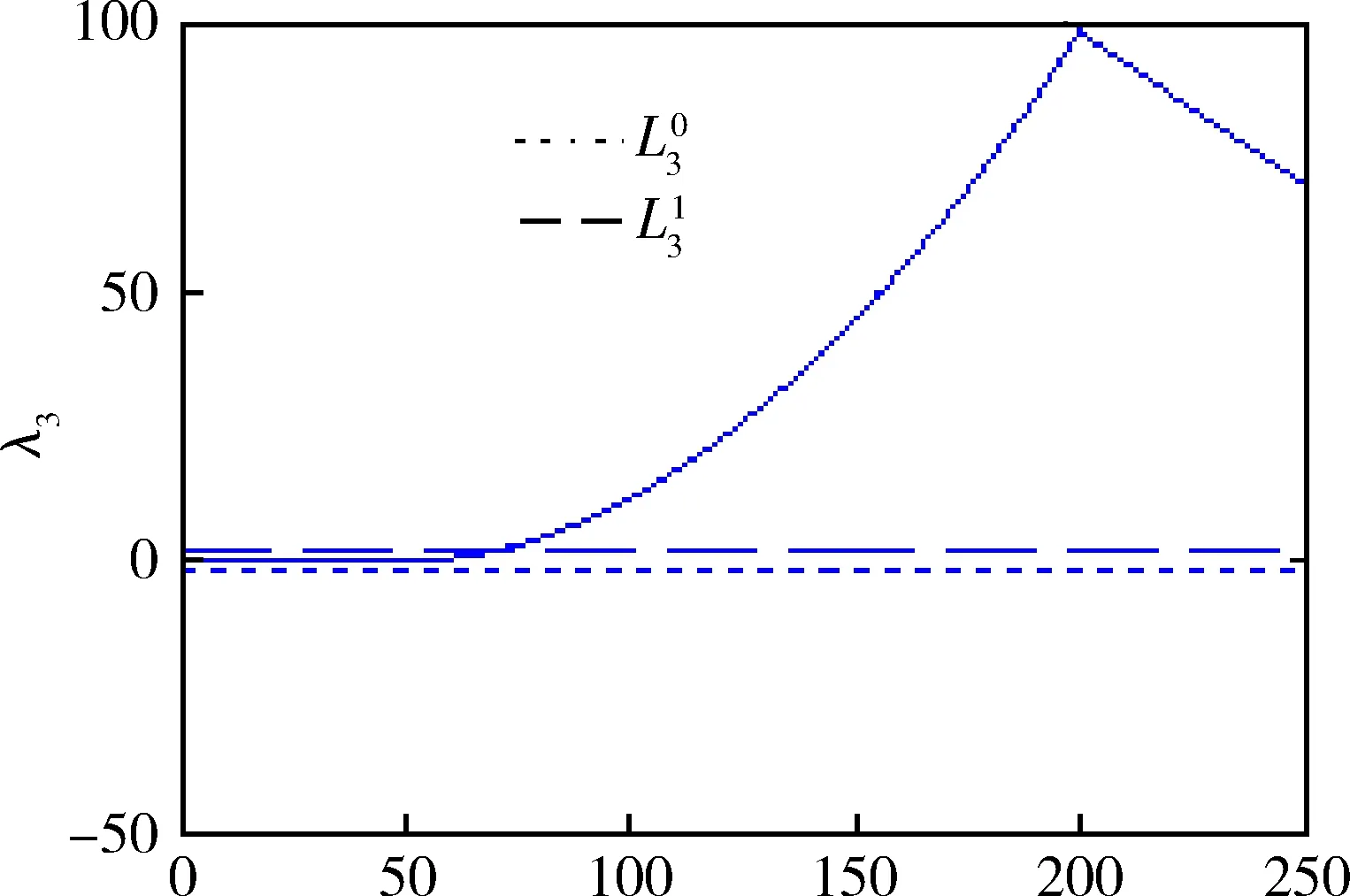
圖6 第3個(gè)UIEKF的判決曲線與門限值
在仿真中,圖1和圖5表明第1個(gè)與第3個(gè)未知輸入擴(kuò)展卡爾曼濾波器的輸出殘差中含有故障信息,并且通過Wald序列檢測(cè)方法很快發(fā)現(xiàn)了故障,如圖2與圖6所示。圖3顯示,第2個(gè)未知輸入擴(kuò)展卡爾曼濾波器的輸出殘差中不含有故障信息。根據(jù)所有3個(gè)UIEKF的決策結(jié)果,由判斷邏輯可以得出結(jié)論,即第2個(gè)飛輪出現(xiàn)故障現(xiàn)象。仿真結(jié)果表明本文建議的故障檢測(cè)與隔離策略是有效的。
[1]MakTafazoli.AStudyofOn-orbitSpacecraftFailures[J].ActaAstronautica, 2009, 64:195-205.
[2]HATalebi,RVPatel,KKhorasani.FaultDetectionandIsolationforUncertainNonlinearSystemswithApplicationtoaSatelliteReactionWheelActuator[C].Systems,Man,andCybernetics, 2007:3140-3145.
[3]NMeskin,KKhorasani.FaultDetectionandIsolationinaRedundantReactionWheelsConfigurationofaSatellite[C].Systems,Man,andCybernetics, 2007:3153-3158.
[4]J.Anzurez-Marin,N.Pitalua-Diaz,O.Cuevas-Silva,J.Villar-Garca.UnknownInputObserversDesignforFaultDetectioninaTwo-tankHydraulicSystem[C].RoboticsandAutomotiveMechanicsConference, 2008.CERMA’08.Electronics,Sept.30 2008-Oct.3 2008: 373-378.
[5]StefenHui,StanislawH.Zak.Low-OrderUnknownInputObservers[C].2005AmericanControlConferenceJune8-10, 2005.Portland,OR,USA: 4192-4197.
[6]KitanidisPK.UnbiasedMinimum-varianceLinearStateEstimation[J].Automatica,1987, 23(6):775-778.
[7] 李令萊.非線性系統(tǒng)的魯棒故障診斷[D].北京: 清華大學(xué), 2006.
The Fault Diagnosis of Spacecraft Attitude Control Flywheel Based on Extended Kalman Filter
WU Hongfang1WANG Zhi2
1.China Air to Air Missile Academy,Luoyang 471009,China2.Xi’an Technoligical University,Xi’an 710032,China
TheunknowninputKalmanfilterisextendedtononlinearsystemsandthenisappliedtothedetectionoftheearlygradualfaultsofspacecraftattitudecontrolflywheelstoimprovethetimelinessoffaultdetectioninordertoavoidtheoccurrenceofmajoraccidents.Asetofstructuredresidualsisconstructedtoachievefaultisolation,andtheWaldsequencedetectionmethodisemployedtoprocessfilterresiduals.Finally,thefaultdiagnosislogicispresented,andthenumericalsimulationresultsshowthatthismethodiseffectiveandisabletoquicklydetectfaults.
Flywheels;Faultdiagnosis; EKF; Waldsequence
2011-08-18
吳紅芳(1977-),女,山東人,本科,工程師,主要從事機(jī)載光電控制系統(tǒng)及飛行制導(dǎo)控制研究;王 志(1972-),男,河南人,博士,主要從事飛行器制導(dǎo)與控制研究。
TP277.2
A
1006-3242(2012)03-0034-04
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
電源技術(shù)(2016年9期)2016-02-27 09:05:39
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
電源技術(shù)(2015年1期)2015-08-22 11:16:28
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21
機(jī)械與電子(2014年1期)2014-02-28 02:07:31