基于紅外技術的超速離心機測溫系統研究與設計*
2012-07-25 05:36:24劉波峰韓延喆卓思成
傳感器與微系統 2012年3期
關鍵詞:信號
向 陽,劉波峰,張 俊,韓延喆,卓思成,林 卉
(1.湖南大學電氣與信息工程學院,湖南 長沙 410082;2.長沙易達儀器有限公司,湖南 長沙 410205)
0 引言
轉速在30000r/min以上的離心機被稱為超速離心機。當轉子高速旋轉時,與空氣摩擦生熱,轉子中被分離的樣品溫度也會隨之升高,將會造成樣品變質。因此,需要正確地測量轉子的實際溫度,以保證分離完成后樣品的品質。
直接測量旋轉中的轉子的實際溫度比較困難,普通離心機通常是在離心室底部離轉子較近的地方安裝接觸式溫度傳感器來測量離心室溫度,從而間接測出轉子溫度。而超速離心機離心室則是處在高真空度環境中,傳統的接觸式測溫方法會造成較大的測量誤差。本文采用非接觸式的紅外傳感器來直接測量轉子的溫度。
1 紅外測溫工作原理
一切溫度高于絕對零度的物體都在不停地向周圍發出紅外輻射能量。根據普朗克原理,物體輻射能量的大小直接與該物體的溫度有關,用公式可以表達為[1,2]

式中P為黑體輻射的能量,δ為史蒂芬—玻耳茲曼常數,ε為物體的輻射率,Tobj為被測物體的絕對溫度。
本系統采用熱電堆紅外傳感器,其工作原理是溫差電勢效應,即同一物體的兩端如果有溫差,這二端將存在電勢差。在熱電堆的實際使用中需考慮環境溫度對輸出的影響,傳感器的輸出電壓可表示為[2]

式中Uobj為傳感器輸出電壓,K為傳感器特性因子,ε為物體的輻射率,Tobj為被測物體絕對溫度,Tamb為環境絕對溫度。
2 離心機紅外測溫系統原理
超速離心機紅外測溫系統的系統框圖如圖1所示。主要包括1)光學系統:通過光闌、濾光片等一系列的光學元件,保證目標最大輻射能量傳送到紅外傳感器,并用以減小傳感器的視場角度,增加紅外傳感器測量的距離系數;2)紅外傳感器:接收紅外熱輻射能量并產生一個微弱的電壓信號來測出目標溫度,同時通過熱敏電阻器阻值的變化測出環境溫度;3)放大濾波電路:將熱電堆電壓信號和熱敏電阻器信號分別經過放大濾波處理,以便后續采樣處理;4)主控制器模塊:負責A/D采樣,數據處理,與觸摸屏的通信;5)觸摸顯示屏:用于參數設置與溫度實時顯示。

圖1 超速離心機紅外測溫系統框圖Fig 1 Block diagram of infrared temperature measurement system of the ultracentrifuge
3 硬件設計
3.1 紅外傳感器
離心機紅外測溫系統采用TS118—3熱電堆傳感器作為溫度采集器件,這種傳感器具有響應速度快、高靈敏度的特點,測量范圍為-20~+85℃。它是由熱電堆和熱敏電阻器兩部分組成,采用4管腳TO—18封裝。
3.2 放大測量電路設計
如圖2所示,信號檢測部分采集兩路信號,一路熱敏電阻器信號,一路熱電堆信號。熱敏電阻器隨著環境溫度的變化改變阻值,通過電橋放大電路可以將變化的電阻值轉換成電壓的變化并進行放大輸出,并且在放大過程中進行線性化,用來對紅外傳感器的測量結果進行實時的補償和修正。
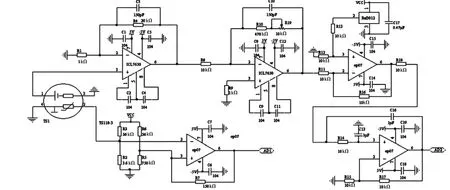
圖2 放大電路Fig 2 Amplification circuit
紅外傳感器信號放大電路的主要作用就是將該微弱電壓信號進行無失真的放大和調理,并消除高頻噪聲的干擾。熱電堆電壓信號非常微弱,其輸出為-1~2 mV,因此,使用斬波穩零式高精度放大器ICL7650構成前置放大器,將熱電堆信號放大1000倍。由于放大倍數較大,為了防止自激振蕩,采用兩級運放進行信號放大,并在每個反饋電阻器上并聯一只電容器來進行相位補償。當離心機轉子的溫度低于離心室環境溫度時,由熱電堆的測溫原理可知,其輸出的電壓信號為負。設計中采用了參考電壓芯片Ref3012,它可以產生1.25 V的參考電壓,通過低漂移運放OP07將傳感器的輸出信號提升,滿足A/D采樣的要求。為防止信號變換過程中的干擾信號,在接入A/D前加入了一個二階低通濾波器,其截止頻率為15.915 Hz。
3.3 主控制器芯片
主控芯片作為整個超速離心機電控系統的核心,在離心機工作時要完成繁多的任務,有較高的要求。本文選用了MSP430系列微控制器MSP430F249,用來完成A/D數據采集處理、數據存儲、串口通信、控制系統運行等任務。MSP430F249擁有精簡的指令集(RISC)結構,豐富的片內資源和超低功耗和強大的數據處理能力。
4 環境溫度補償算法研究與實現
由紅外測溫的原理可知,熱電堆輸出電壓將隨著目標物體與環境溫度之間的差值的變化而變化,因此,必須要進行環境溫度的補償才能得到較精確的測量結果。本文通過軟件的方法來實現補償,實現了傳感器與微處理器結合的智能傳感器系統,從而達到較高的精度,滿足超速離心機對溫度測量精度的要求。
4.1 環境溫度的測量
環境溫度的測量由TS118—3內集成了一只熱敏電阻器來完成,其輸出的電壓信號經過相應電橋放大調理后與環境溫度變化對應呈線性對應關系。
4.2 一維環境溫度補償算法
一維環境溫度補償算法是在多項式擬合的時候先暫時不考慮環境溫度的影響,把不同環境溫度下的輸出曲線在某一環境溫度做多項式擬合,擬合得到的各階系數適用于整個環境溫度范圍,只是常數項有不同,然后再根據環境溫度的變化來計算出常數項的值[3]。以環境溫度為20℃時物體輸出特性的擬合公式f(Uobj,20)作為標準,二次項和一次項系數不變,只改變常數項的值。這樣就還需要一個函數g(Tamb,20)來計算不同環境溫度下測量的物體溫度與20℃下測量的物體溫度之間的差值,用公式可以表達為

式中Tobj為物體實際溫度,Uobj為熱電堆輸出電壓,Tamb為環境溫度。使用Matlab擬合出的特性公式為

則將式(4),式(5)代入式(3)可得

擬合的特性曲線如圖4所示。
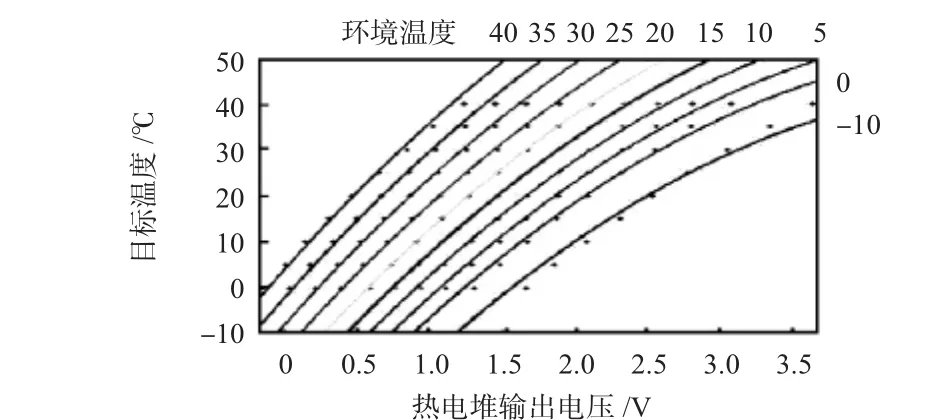
圖3 不同環境溫度下的目標溫度擬合曲線圖Fig 3 Temperature fitting curve of target under different temperature
由圖3所見,在離心機工作溫度范圍下的溫度擬合效果并不好,最大誤差達到了2℃左右,不能符合超速離心機溫度測量誤差最大為±1℃的要求。因此,需要使用更加精確的補償算法。
4.3 二維回歸分析補償算法
4.3.1 二維回歸分析數學模型
多維回歸分析法是數據處理方法之一,由多維回歸方程來建立被測目標參量與傳感器輸出量之間的對應關系,按照最小二乘法用實驗中的校準數據計算出均方誤差最小條件下的回歸方程系數[4]。這樣,當測得傳感器的輸出值時,就可以利用多維回歸方程來計算出相應的目標參數。因此可以使用多維回歸分析法建立一個二元函數如下

式中Tobj為目標溫度,Uamb為熱敏電阻器輸出信號,Uobj為熱電堆輸出信號。
使用熱敏電阻器輸出信號Uamb和熱電堆輸出信號Uobj來共同計算目標的實際溫度Tobj,利用二維回歸方程描述為

式中a0,a1,a2,a3,a4,a5為常數項,ε為高階無窮小。如果能把式中的各常數項系數推導出來,那么目標溫度Tobj就可以計算出來了。
4.3.2 各常數項系數的確定
在離心機轉子工作溫度的范圍內確定n個目標溫度標定點,在環境溫度范圍內確定m個環境溫度標定點,于是由目標溫度與環境溫度構成的標準發生器在各個標定點的標準輸入值為
對應于上述各個標定點可以得到相應的輸出電壓值Uambk與Uobjk。這樣,相當于在m個不同環境溫度狀態下進行n次檢測標定,經標定獲得了m條熱電堆輸入輸出特性曲線。
為確定二次曲面擬合方程式中的常數項,可以根據最小二乘法原理,使求得的系數值滿足均方誤差最小,即二次曲面擬合方程得到的f(Uambk,Uobjk)與標定點Tobjk之間存在誤差,其方差為

式中k=1,2,…m×n。總共有m×n個標定點,其均方誤差R應為最小
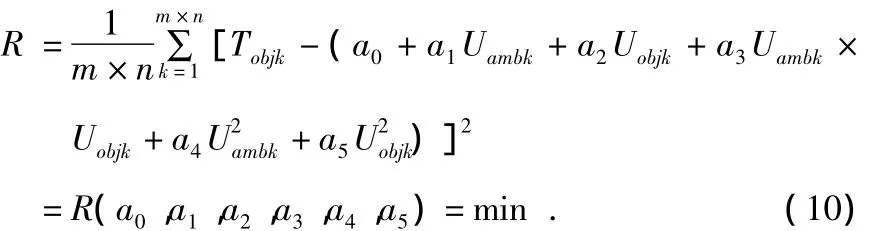
由式(10)可見,均方誤差R是常系數a0~a5的函數,根據多元函數求極值的條件,令下列各偏導為0,即

由上述方程組可以求出各常數項系數,如此二次曲面擬合方程式就完全確定了。利用上述公式可推得曲面的擬合公式為

使用Matlab擬合所得特性曲面如圖4所示。
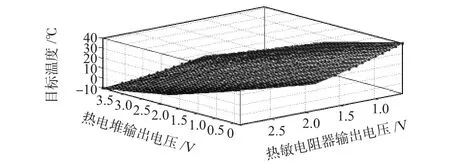
圖4 不同環境溫度下目標溫度擬合曲面圖Fig 4 Fitting surface temperature map of target under different temperature
圖5顯示了各個標定點與擬合曲面之間的關系,從中可以看出各標定數據與擬合計算數據最大誤差不超過±0.5℃,符合了超速離心機對溫度測量精度的要求。
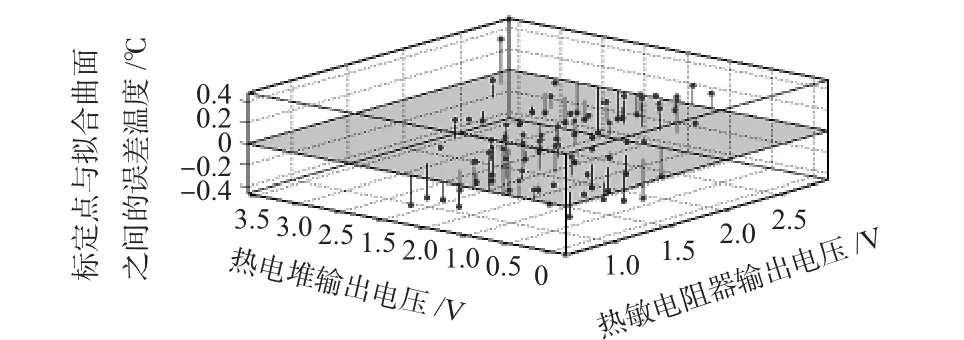
圖5 各標定點與擬合曲面的誤差Fig 5 The error between the calibration points and fitting surface
5 發射率的影響

6 結論
本文研究了一種基于紅外技術的超速離心機測溫系統,完成了系統的整體設計和測量放大電路設計,并通過軟件補償算法,抑制了環境溫度與被測體發射率對測溫精度的影響。通過仿真實驗和實際測試,本系統的溫度測量誤差不大于±0.6℃,達到了設計要求,并為超速離心機離心室的溫度控制提供了先決條件。
[1]松井邦彥.傳感器實用電路設計與制作[M].北京:科學出版社,2005.
[2]晏 敏,彭楚武,顏永紅,等.紅外測溫原理及誤差分析[J].湖南大學學報,2004,31(5):110 -112.
[3]任 焜,胡益民,吳 堅,等.一種實用紅外測溫儀數字溫度補償方法[J].傳感器技術,2004,23(12):59 -61.
[4]孟秀峰.一種多傳感器信息融合的優化方法[J].傳感器與微系統,2010,29(12):67 -68.
[5]龐建瑩,施云波,修德斌,等.基于紅外傳感器的電氣火災預警系統[J].儀表技術與傳感器,2010(3):64 -66.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06