DGPS與UWB混合精確無縫定位技術研究*
2012-07-25 05:36:04鄔春明
傳感器與微系統 2012年3期
鄔春明,耿 強,劉 杰,范 睿
(東北電力大學信息工程學院,吉林吉林 132012)
0 引言
近年來,無線定位技術的發展與應用遍布全球。WiFi,Zig Bee,藍牙,GPS和 UWB 等[1]新興的無線定位技術,在辦公室、家庭、工廠、公園等大眾生活的方方面面得到了廣泛應用,并具有廣闊的發展前景。然而,WiFi,Zig Bee,UWB等室內定位技術的定位范圍有限,而GPS室外定位技術由于信號的遮擋而嚴重影響定位效果,甚至不能定位。蜂窩無線定位和GPRS定位雖能同時適用于室內外,但其定位精度不夠高。在許多具體應用中,往往需要對目標進行室內外無縫精確定位,這就需要一個很好的解決辦法。文獻[2]提出INS和GSM混合定位,文獻[3]提出利用2種濾波器進行數據融合的DGPS和WUB結合定位算法等,但GPS和GSM混合定位精度有待提高,而文獻[3]精確定位范圍有限,因此,都有一定的局限性。
本文將UWB和 DGPS兩種定位方法相結合,利用GPRS信號作為GPS和傳感器傳輸數據的載體,利用Kalman濾波器來消除UWB的NLOS誤差,并使用粒子濾波器對DGPS和UWB數據進行融合,使定位精度在室內達到cm級,室外達到較小的 dm級。使用 Kalman濾波器對UWB數據進行濾波后,比單純使用粒子濾波器進行數據融合和濾波的定位精度有較明顯提高,能夠達到無縫精確定位的效果。
1 系統設計與實現
對于室內外無縫定位系統而言,室外將使用DGPS定位方法,室內使用UWB定位方法。但在室內外交接的復雜環境下,UWB信號會由于非視距誤差導致定位精度下降,而DGPS信號由于多徑效應和信號遮擋,定位精度也會下降。本系統通過使用濾波器融合UWB定位數據與DGPS定位數據,達到提高定位精度的目的。為了驗證濾波器的效果,設計了一個基于UWB和DGPS的定位系統,系統組成如圖1所示。
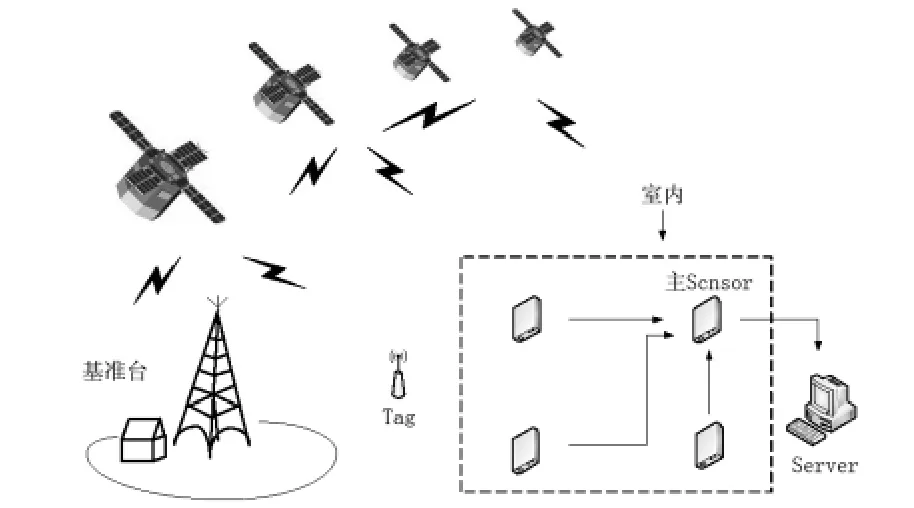
圖1 定位系統組成圖Fig 1 Composition diagram of positioning system
圖中,Tag為融合了UWB發射器,GPS接收器與GPRS通信模塊的混合體,其硬件結構如圖2所示。
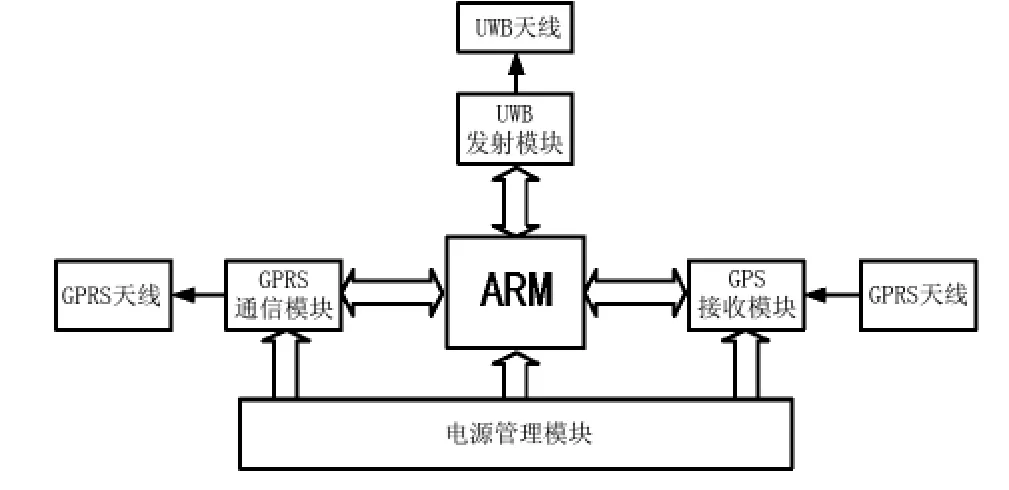
圖2 Tag終端結構圖Fig 2 Terminal structure diagram of Tag
Tag將UWB脈沖發送至Sensor,并將接收到的GPS(基準站把修正誤差數據傳送至Tag,Tag對接收到的GPS數據進行修正)數據通過GPRS無線通信模塊發送至主Sensor,主Sensor負責對接收到的UWB數據進行位置解析和計算,并接收GPS位置數據,最后將位置數據傳至Server端。其他Sensor與主Sensor之間,主 Sensor與 Server端之間也利用GPRS通信模塊進行數據傳輸。系統工作流程如下:
1)確定其他Sensor到主Sensor的時間差;
2)其他Sensor接收到Tag發出的UWB脈沖信號后,將接收到信號的時刻發送至主Sensor,主Sensor對時間信息利用濾波器進行處理,并進行時間補償后,再利用到達時間差(time difference of arrival,TDoA)[4]的方法解析計算 Tag的位置;
3)將通過UWB定位得到的Tag位置信息與獲得的GPS位置信息(如有位置信息的話)傳送至Server端;
4)Server端主要負責將GPS使用的WGS—84坐標轉換為與UWB定位坐標統一的大地坐標,以及通過濾波器實現數據融合,最終確定位置信息。
2 UWB和DGPS混合定位原理
通常情況下,UWB信號的脈沖寬度在0.2~1.5 ns,持續時間短,占空比低,空間距離偏差為6~45 cm。不考慮其它誤差時,采用TDoA方法進行定位,理論誤差可達到cm級。由于UWB信號采用持續時間極短的窄脈沖,在時間、空間的分辨力都很強,因此,系統的多徑分辨率極高(1 ns脈沖的多徑分辨率為30 cm),但在室內外交接處,與采用TDoA方法的其他常規無線定位法一樣,由非視距傳播造成的NLOS誤差也是UWB定位誤差的主要來源[5]。因此,在主Sensor接收到UWB時刻信息時,為了提高定位精度,就需要對NLOS誤差進行消除。本文采用Kalman濾波器來對時刻信息進行處理,消除NLOS誤差。
在Server端,由于UWB和DGPS的刷新率的不同,可能接收到3種情況下的位置數據,即只有UWB數據、只有DGPS數據、既有UWB數據又有DGPS數據。系統采用粒子濾波器對Server端的位置數據進行處理,粒子濾波器對任意分布噪聲都適用,并能夠很好地融合不同傳感器的數據,整個系統采取的數據融合示意圖如圖3所示。
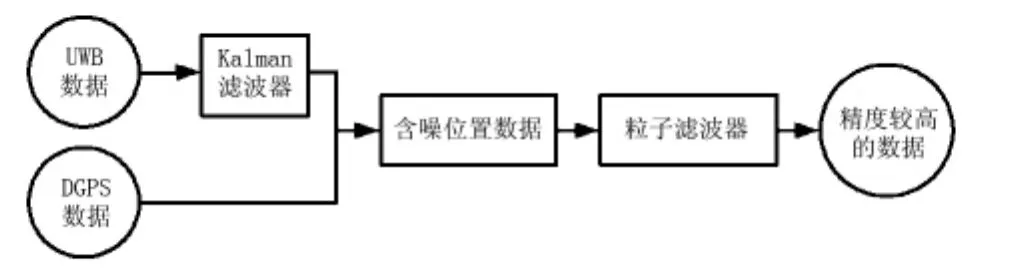
圖3 系統數據融合示意圖Fig 3 Diagram of system data fusion
2.1 Kalman濾波器消除NLOS誤差
Kalman濾波就是建立2個分別表示未知狀態的轉移過程和測量系統輸入與輸出關系的方程式,為某時刻的狀態值與當前時刻以及之前各時刻的測量值建立關系。即Kalman濾波轉變為求解未知狀態方程和測量方程的問題。Kalman濾波主要由狀態轉移方程(式(1))和測量方程(式(2))組成

其中,s(m)=[x(m),y(m)vx(m),vy(m)]T為狀態向量,z(m)為測量向量,A為采樣間隔Δ的狀態轉移矩陣,G(m)為測量矩陣,w(m)=[0 0wx(m)wy(m)]為速度噪聲分量,其協方差矩陣為Q,v(m)為噪聲分量。建立了關系方程之后,就可以在給了m時刻的狀態向量和估計誤差的協方差的初始值之后,通過迭代運算對不同時刻的狀態向量做出估計。迭代過程

采用Kalman濾波消除NLOS誤差,首先通過狀態轉移方程得到Tag的估計位置,該估計位置到一個Sensor之間的距離與它到主Sensor的距離之差,再與TDoA的測量值進行比較,若比較結果大于設定的門限值,則判定該Sensor接收的數據含有NLOS誤差。對判定不含NLOS誤差的數據,直接采用TDoA算法進行定位,對含有NLOS誤差的數據,構造NLOS加權矩陣列[6],利用Kalman濾波對NLOS誤差進行估計和消除,得出較精確的Tag位置數據。
2.2 粒子濾波器實現數據融合
粒子濾波(particle filter,PF)技術是一種用于非線性、非高斯系統的濾波方法,其思想基于蒙特—卡洛方法(Monte-Carlo methods),它利用粒子集來表示概率,可以用在任何形式的狀態空間模型上。其核心思想是通過從后驗概率中抽取的隨機狀態粒子來表達其分布,是一種順序重要性采樣法(sequential importance sampling)。其優點在于對任意噪聲都適用,并且能夠很好的融合不同傳感器數據。文獻[7,8]敘述了粒子濾波器的一般算法。
為避免粒子退化現象,采用重采樣算法以去除權值小的粒子。實驗從系統變化模型中產生粒子

由式(9)可知,權重的遞推更新式表示為

由式(10)知,可以在重采樣過程中舍棄權重較小的粒子。
實驗中,UWB數據的刷新率要大于DGPS的刷新率,即zt包含了一個DGPS位置信息和多個UWB位置信息,可以表示為

由于每種測試手段中(UWB,DGPS)的隨機測量誤差是獨立的,可以獲得以下的式子

建立GPS接收機模型為


3 實驗仿真分析
實驗分兩部分進行,第一部分驗證Kalman濾波消除NLOS誤差的效果,第二部分驗證系統的無縫定位效果。為測試定位算法的定位效果,采用室內外混合環境場景,6只UWB傳感器安放在室內的角落,Tag在室外沿著半徑為2R的半圓弧從A門進入室內,在室內沿著半徑為R的半圓弧從B門出去,如圖4所示。
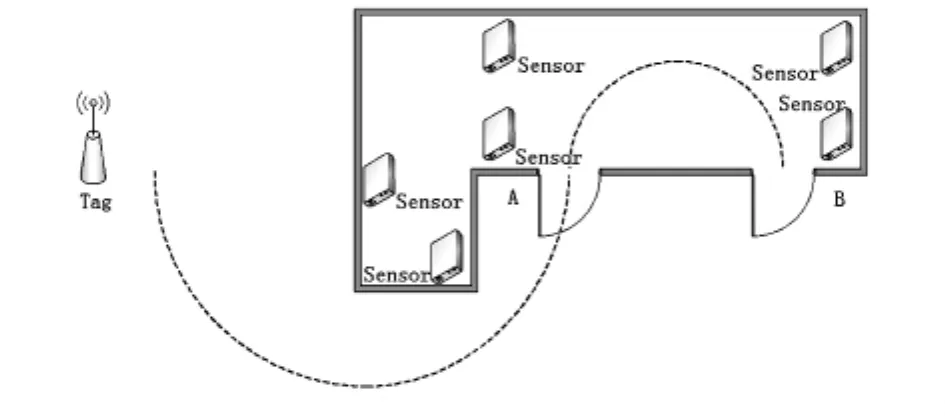
圖4 實驗場景Fig 4 Test scene
實驗中,Tag以初速度2 m/s前進,Kalman濾波的參數為Δ=0.5 s,Q=0.05,粒子濾波器采用400個粒子。默認UWB信號有效傳輸距離為10 m,半徑R為4 m。
實驗首先驗證Kalman濾波消除NLOS誤差的效果,然后驗證系統的定位效果。
圖5(a)為沒有使用Kalman濾波的原始運動軌跡圖,圖5(b)是只有UWB信號情況下使用Kalman濾波消除NLOS誤差的運動軌跡圖,實驗圖為大地坐標的2維圖。從圖5可知,在室內外交接的地方(圖中x軸-6.6108~0 m坐標對應值),UWB信號由于NLOS誤差受到很大干擾,定位精度下降比較明顯,在x坐標軸-3.7822 m點上達到最大誤差80.32 cm,而使用Kalman濾波器可以很好地消除NLOS誤差,其最大誤差17.13 cm,可見Kalman濾波對于UWB信號NLOS誤差的消除效果較好。
圖6為在粒子濾波器基礎上使用Kalman濾波對UWB信號進行濾波的前后效果圖,由圖可知,Kalman濾波可以與粒子濾波器很好的結合,尤其在室內外交接的地方(圖中x軸-6.6108~0 m坐標對應值),定位精度從平均36.9 cm提高到15.6 cm。可見,先使用Kalman濾波器對UWB信號的NLOS進行濾除,再使用粒子濾波器進行數據融合和濾波,比單純使用粒子濾波器具有更好的定位效果。
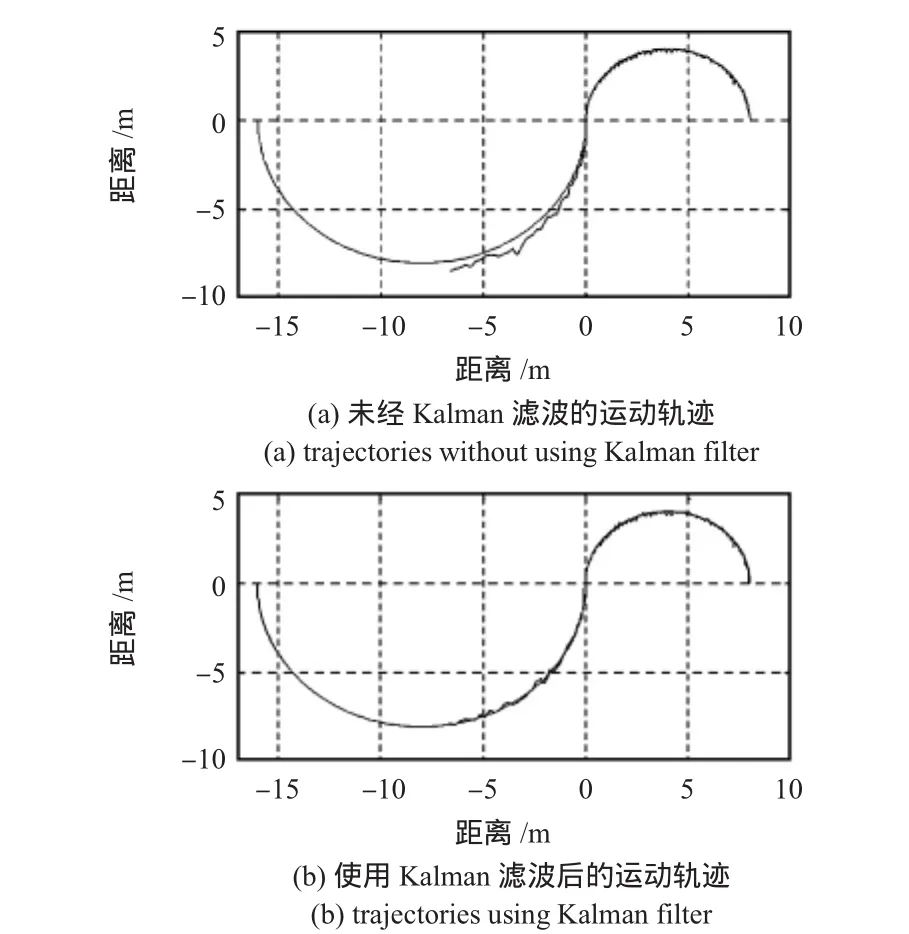
圖5 使用Kalman濾波的前后效果圖Fig 5 Effect diagram before and after using Kalman filter
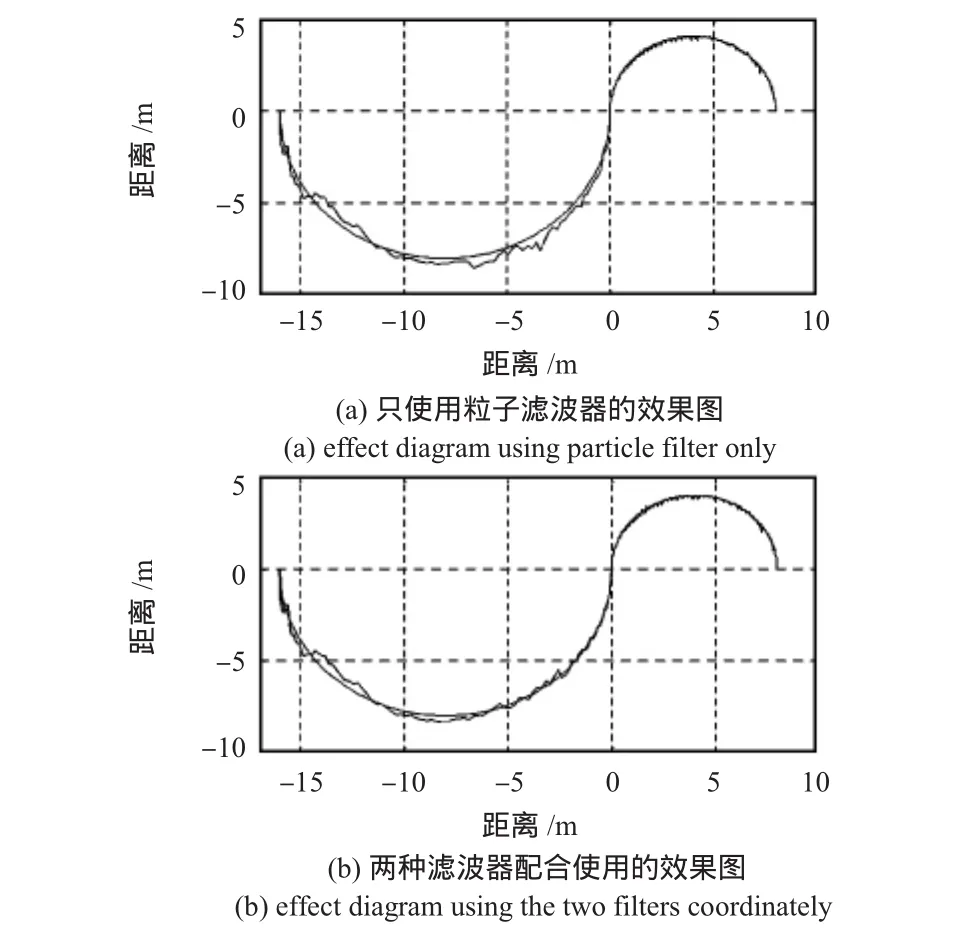
圖6 在粒子濾波器基礎上使用Kalman濾波前后效果圖Fig 6 Effect diagram before and after using Kalman filter based on particle filter
實驗結果表明:該方法能夠使系統定位精度在室內達到cm級,室外達到較小的dm級,在粒子濾波器基礎上使用Kalman濾波器對UWB數據進行濾波,能夠使系統整體定位精度提高19%,實現精度較高的室內外無縫定位。
4 結論
通過實驗得出,將UWB和DGPS兩種定位方法相結合,利用GPRS信號作為DGPS傳輸數據的載體,使用Kalman濾波器來消除UWB的NLOS誤差,并使用粒子濾波器對DGPS和UWB數據進行融合的方法,能夠構成一個全面、準確的定位網絡,如果能夠將算法進一步完善,例如:對于門限和參數設定的具體研究,并能夠硬件實現,那么,無論在商業上還是在軍事應用上都具有可觀的價值。
[1]阮衛華.常見的室內無線定位技術簡介[J].科技信息,2009(33):874.
[2]張 濤,徐曉蘇.基于小波和人工智能技術的車輛無縫定位技術研究[J].控制與決策,2010,25(7):1110 -1112.
[3]李 杰.基于UWB和DGPS的混合定位方法研究[J].計算機應用與軟件,2010,27(5):212 -215.
[4]鄔春明,張海波.基于 WSNs的風力發電運行監測系統LEACH協議改進研究[J].東北電力大學學報,2011,31(1):29-30.
[5]尹 蕾,李 瑤,劉洛琨,等.一種基于卡爾曼濾波的UWB定位算法[J].通信技術,2008,41(2):10 -12.
[6]孫克輝,蔡永棋.NLOL環境下的卡爾曼濾波跟蹤定位算法[J].微計算機信息,2009,25(21):163 -165.
[7]毛 琳,劉 勝.多傳感器分布式信息融合粒子濾波器[J].計算機工程與應用,2010,46(12):118 -119.
[8]尹建君,張建秋.多傳感器快速粒子濾波器融合的方法及其在導航中的應用[J].傳感技術學報,2007,20(9):2113-2118.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代出版(2020年3期)2020-06-20 07:10:34
電子制作(2018年11期)2018-08-04 03:25:42