無線傳感器網絡信息時空融合模型與算法研究*
2012-07-25 05:34:00鮑必賽伍健榮樓曉俊劉海濤
傳感器與微系統 2012年4期
鮑必賽,伍健榮,樓曉俊,劉海濤,2
(1.中國科學院上海微系統與信息技術研究所無線傳感器網絡與通信重點實驗室,上海 200050;2.無錫物聯網產業研究院,江蘇無錫 214135)
0 引言
無線傳感器網絡是由大量的能量、計算、存儲及通信有限的傳感器節點組成[1]。信息融合技術可以有效地降低能耗,解決能量和通信帶寬等方面的受限問題,延長網絡壽命。同時,信息融合技術也能夠解決因環境干擾和傳感器節點失效等帶來的不確定性,提供信息的準確度[2]。
無線傳感器網絡中的信息融合一般有2個過程,一是時間序列上的信息融合,稱為時間融合;一是分布式空間上的信息融合,稱為空間融合。因此,一般將無線傳感器網絡中的信息融合稱為時空融合。時空融合的關鍵問題是模型設計,本文提出了一種時間和空間多級混合融合的結構模型,根據節點通信和信息融合的能耗,選擇適合每個節點的融合結構,從而最大程度地降低整個網絡時空融合的能量消耗,并就該模型提出基于DS證據理論的多級時空融合算法。
1 無線傳感器時空融合的結構模型
無線傳感器網絡通常由傳感器節點、匯聚節點以及通信網絡和應用管理中心組成,結構如圖1所示。大量的傳感器節點隨機部署在檢測區域內部或者附近,通過自組織的方式構成網絡。傳感器節點先采集檢測數據,并對監測的數據進行預處理,同時將預處理的結果發送給匯聚節點,由匯聚節點對所有傳感器數據進行融合處理,形成決策結果傳輸到用戶管理中心。
目前研究和應用的時空融合的結構模型一般是兩級時空融合模型。文獻[3,4]采用單節點多測量周期和多節點單測量周期的融合模型。即先在每個節點對檢測的時間序列進行融合,得到每個節點對目標的估計,然后,每個節點將時間融合后的估計結果發送給匯聚節點,匯聚節點對各個節點的估計結果進行空間融合,從而得到目標狀態的最終結果。該模型雖然減少了通信量,但對于每個節點而言,需要在預處理的結果上,再進行一次時間上的融合判決,增加了每個節點的計算量,從而增加每個節點的計算能耗。

圖1 無線傳感器網絡體系結構Fig 1 System architecture of wireless sensor networks
文獻[5]采用多節點單測量周期融合和多節點多測量周期的融合模型。即先在同一時間對不同空間位置的各節點的觀測值進行空間融合,空間融合是對傳感器信息進行初步的分類,得到各個不同時間的觀測目標估計,然后對不同時間的觀測目標估計和決策信息按時間順序進行時間融合。時間融合是對空間融合的再次融合。該模型中,單個節點不需要進行時間上的融合,減少了計算量,但由此提高了信息傳輸的頻率。這個模型中,要求每個節點都要將預處理后的數據發送給匯聚節點進行空間融合。由于節點通信能力有限,且傳輸的距離和通信帶寬都非常受限,距離匯聚節點較遠的節點發送的數據需要經過多跳后路由到匯聚節點,從而增加了通信能耗。
針對以上2種模型無法解決無線傳感器網絡時空融合模型能耗最優的問題,本文提出了一種時間和空間混合的多級時空融合模型,如圖2所示。當一個節點采用文獻[3,4]的融合模型進行時空融合產生的能耗大于采用文獻[5]的融合模型,則稱該節點為近鄰節點。在該模型中,近鄰節點直接將預處理的估計結果發送給匯聚節點,由匯聚節點進行空間融合后進行時間融合;非近鄰節點先在每個融合周期上進行時間融合,并將融合結果發送給匯聚節點;最后,在匯聚節點上將近鄰節點的時空融合結果和非近鄰節點的時間融合結果進行融合,得出最終的決策信息。在該模型中,通過比較不同的融合方式所產生的能耗,選擇最優的融合方式,減少了非近鄰節點因為多跳轉發的次數和近鄰節點時間融合增加的計算量,從而達到降低能耗的目的。
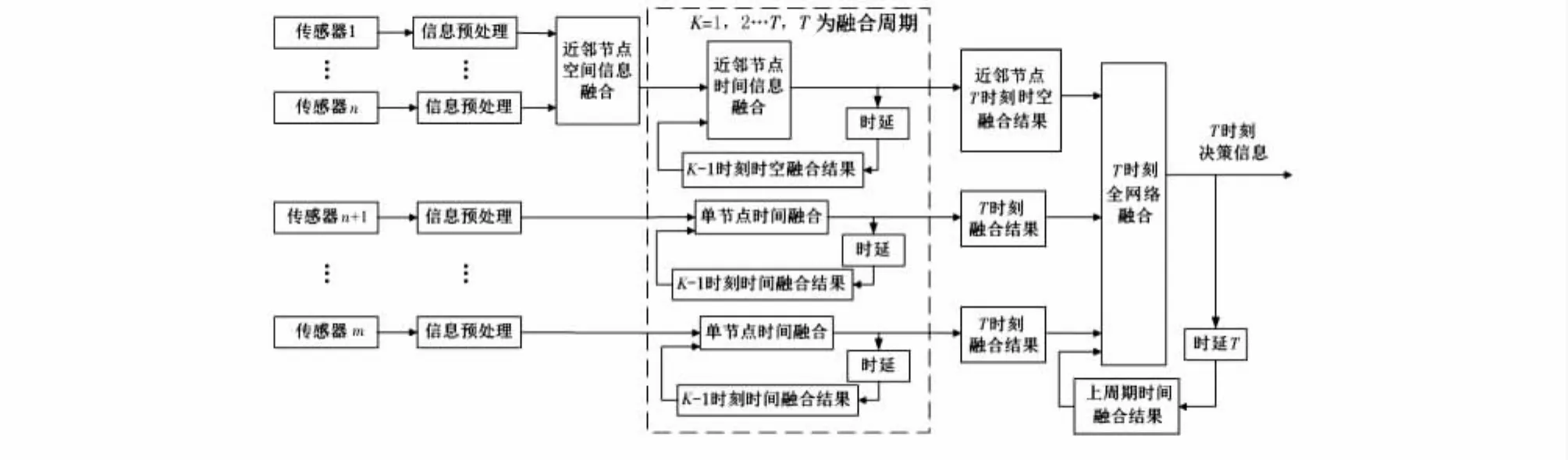
圖2 無線傳感器網絡多級時空融合模型Fig 2 Multi-stage spatio-temporal fusion model of WSNs
2 基于DS證據理論的多級時空融合算法
2.1 融合算法的選擇
目前研究的時空融合算法都基于文獻[3,4]和文獻[5]提出的兩類模型,直接將原有的融合算法移植到多級混合時空融合模型將有可能會引起融合結果與原有的融合結果不一致,而且當無線傳感器網絡的節點狀態發生變化,也有可能引起融合結果的不一致。為了確保融合結果的可靠性,且不會隨著融合模型的變化而產生不一致的融合結果,多級時空融合算法的選擇需要考慮以下兩點因素:
1)選擇與融合的順序無關的算法,保證不同模式下時空信息融合結果的一致性;
2)選擇具有容錯能力,識別率、可靠性高的算法。
鑒于以上兩點考慮,選擇DS方法作為無線傳感器網絡混合時空融合的數據融合方法。可以證明,DS證據理論應用與多級時空融合算法,其融合結果與融合的順序無關,并具有較強的處理不確定信息的能力,可靠性高[5~7]。
2.2 DS證據理論在無線傳感器網絡時空融合中的應用
在無線傳感器網絡信息時空融合中,由于傳感器數量眾多,數據量非常大,所以,可以采用由2個證據結合的計算遞推得到的結構。假設:
1)無線傳感器網絡中有n個節點探測相同的目標;
2)時間融合的周期為T,即最終融合決策信息需要經過T次時間融合;
3)設第i只傳感器第t時刻的測量值為mit,其中,i=1,…,n,t=1,…,T;
4)mi(1,T)表示第i個節點在一個融合周期內的時間融合結果;
5)m(i,k)(1,T)表示第i至k個節點在一個融合周期內的時空融合結果,其中,i≤k≤n。
最終融合決策信息的基本概率分配為
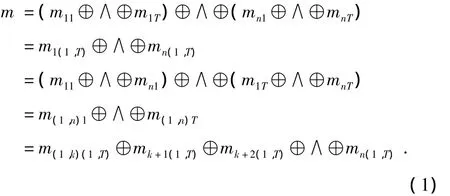
從式(1)可以看出:使用DS證據的融合算法,最終的融合結果與各節點時間—空間的融合順序無關。將式(1)定義為基于DS證據理論的多級時空融合算法。
理想情況下,無線發射功率P和接收半徑R之間的關系為P=R2。為了評估時空融合能耗與時空融合模型的關系,做以下設定:
1)節點接收半徑為該節點到下一跳節點的距離;
2)節點發送信息基礎能耗(接收半徑R=1時)一致,且都為e1。
3)第i個節點將信息發送給匯聚節點需要經過Si(Si≥1)跳,即(Si-1)次轉發,每一跳的節點發送信息的接收半徑為Rij,其中,1≤j≤Si。
4)每個節點接收信息、算法判決的能耗都是一致的,分別為e2,e3。
節點采用文獻[3,4]的融合模型,其融合周期內總能耗為

節點采用文獻[5]的融合模型,其融合周期內總能耗為

在無線傳感器網絡多級混合時空融合模型中,本文提出了如下融合準則:
1)當E'i>E″i時,該節點為近鄰節點,選擇先空間再時間融合的方式進行時空融合;
2)當E'i<E″i時,該節點為非近鄰節點,選擇先時間再空間融合的方式進行時空融合;
3)當E'i=E″i時,2種方式的時空融合能耗相等,2種方式任選其一。
設無線傳感器網絡中有k個近鄰節點,其中,k≤n,則基于DS證據理論的多級時空融合算法框架如圖3所示。

圖3 基于DS證據理論的多級時空融合算法框架Fig 3 A framework of multi-stage spatio-temporal fusion algorithm based on theory of DS evidence
網絡所有節點采用文獻[3,4]、文獻[5]以及本文所提出的融合模型進行時空融合,一個融合時間周期的總能耗分別為

與文獻[3,4]和文獻[5]的融合模型相比,多級時空融合算法節省的能耗分別為

3 應用舉例
為了驗證多級混合時空融合模型降低能耗的有效性,將多級混合時空融合模型應用如下無線傳感器網絡,并與文獻[3,4]和文獻[5]時空融合模型進行比較。
該無線傳感器網絡總計有10個節點,其e1,e2,e3分別為0.2 ×10-3,0.1 ×10-3,0.5 ×10-3J,融合周期T為 5,如圖4所示。
根據式(2),式(3)分別計算節點采用不同融合模型進行時空融合的能耗,如圖5(a)所示。根據多級混合時空融合模型的融合規則,得出采用該模型的能耗如圖5(b)。使用文獻[3,4]的融合模型一個融合周期的總能耗為27.568 ×10-3J,使用文獻[5]的融合模型總能耗為30.272×10-3J,而使用多級時空融合算法,其總能耗僅為23.96×10-3J,大大地降低了時空融合的總能耗。

圖4 節點分布示意圖Fig 4 Distribution map of sensor nodes

圖5 三種融合模型融合能耗比較Fig 5 Comparison of fusion energy consumption of three kinds of fusion models
4 結論
本文從無線傳感器網絡的信息時間和空間的融合出發,提出了一種無線傳感器網絡信息時間和空間多級混合融合的結構模型,并就該模型提出了基于DS證據理論的多級時空融合算法。該模型能夠結合節點在網絡中所處的地理位置,采取不同的時空融合順序,且不影響最終的融合決策結果。從數據分析結果可以看出:由于運用了多級時空融合,在保證系統識別率和性能的同時,大大地降低了節點的能耗,延長了網絡壽命,為無線傳感器網絡解決資源受限提供了一種新的方法。
[1]Camteps S.A,Yener B.Key distribution mechanisms for wireless sensor networks:A survey[R].Rensselaer Polytechnic Institute,2005.
[2]孫利民,李建中.無線傳感器網絡[M].北京;清華大學出版社,2005:16-25.
[3]Li Meng,Dong Wei,Lü Bo,et al.Model of multi-sensor data fusion and trajectory prediciton based on echo state network[C]//International Conference on Computer,Control and Electronic Engineering,2010:338 -341.
[4]王杰貴,羅景清.多傳感器基于證據理論的機載雷達用途識別[J].系統工程與電子技術,2002,24(6):49 -52.
[5]羅大庸,張 遠.多傳感器信息時空融合模型及算法研究[J].系統工程與電子技術,2004,26(1):36-39.
[6]藍金輝,馬寶華,藍 天,等.D-S證據理論數據融合方法在目標識別中的應用[J].清華大學學報:自然科學版,2001,41(2):53-56.
[7]宋建勛,張 進,吳欽章.基于D-S證據理論的多特征數據融合算法[J].火力與指揮控制,2010,35(7):96 -98.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代出版(2020年3期)2020-06-20 07:10:34
數學物理學報(2020年2期)2020-06-02 11:29:24
中華手工(2017年2期)2017-06-06 23:00:31
光學精密工程(2016年6期)2016-11-07 09:07:19
中外會展(2014年4期)2014-11-27 07:46:46