基于PVDF壓電傳感器的車輛動態稱重信號的研究*
2012-07-25 05:35:06鐘匯才梁艷菊林蓁蓁
傳感器與微系統 2012年4期
陳 政,鐘匯才,李 慶,梁艷菊,林蓁蓁
(1.中國科學院微電子所昆山感知中心,江蘇昆山 215347;2.中國科學院微電子研究所,北京 100029)
0 引言
車輛的動態稱重(weight-in-motion)是智能交通系統要解決的關鍵技術之一,具有速度快、效率高、不干擾正常交通等優點。在交通系統中采用車輛動態稱重系統不僅可以有效地提高交通系統運輸效率,還可以為交通管理的信息化和智能化提供實時的交通數據。對于怎樣分析車輛動態稱重系統的稱重過程和稱重信號,國內外的學者展開了諸多研究工作。Ono T提出用受力分解和Grey估計模型分析車輛的動態稱重過程[1];Kim S K等人結合AFT模型和歸一化重構信號測量動態車重[2];Deesomsuk T等人用Vehicle-bridge模型分別對定車重和時變車重進行了實驗和比較[3];XU Jian等人用離散小波變換除去信號噪聲提高WIM系統精度[4]。總體而言,目前的研究能較好地分析系統的受力過程,但是這些方法普遍采用復雜的軟件算法,增加系統在計算上的時間消耗,大大影響系統的實時性。
本文使用聚偏二氟乙烯(PVDF)壓電薄膜作為系統的稱重傳感器,提出將傳感器對車輛軸重的響應過程看作車輛重力瞬態作用下的阻尼振動的過程,稱重結果即為系統對瞬態作用力的響應。該方法著重于分析信號頻率方面的特點,忽略PVDF傳感器的粘性特征,大大簡化了車輛稱重的分析過程,可以簡潔有效地分析出信號的頻譜特點。最后,通過實驗驗證了理論分析的結果。
1 車輛動態稱重系統的信號分析
PVDF是一種高分子聚合物型材料,具有壓電系數高、介電強度高、穩定性好等諸多優點,非常適合作為車輛動態稱 重傳感器[2,5~7]。在稱重系統中使用的典型PVDF壓電薄膜傳感器為條狀傳感器,其規格為3 m×6.6 mm。取一段長為L,寬為W,厚為T的PVDF薄膜為研究對象。根據晶體電學理論和實際應用情況,在無外電場的條件下,由第一類壓電方程可以得到PVDF壓電薄膜的電位移矢量為

式中Di為材料的電位移矢量,dij為壓電常數,Tj為車輛經過傳感器產生的應力,i為空間坐標的3個分量,j為二階對稱張量的6個獨立分量。選取z軸為PVDF的極化方向,x軸垂直于極化方向,y軸垂直于x軸和z軸。在車輛經過傳感器時,傳感器受z軸方向的車輛重力作用,在z軸方向產生的極化電荷。由于PVDF材料拉伸極化后具有4 mm點群的對稱性,可以得到傳感器的電荷位移矢量D為

PVDF傳感器的d15遠小于d33,d32及d31,在實際的計算中,可以忽略d15的影響。同時,由于傳感器在車輛行進的y方向上的寬度僅為6.6mm,相對于車輛的行進速度,可以忽略在y方向上的受力。故僅考慮z方向上的作用力,則有

通過對壓電體厚度方向上伸縮振動模式的分析,其電位移矢量D為[8]
式中 ε3為介電常數,E3為電場強度。在無電場的情況下,車輛經過PVDF壓電傳感器產生電荷的過程,符合壓電體在厚度方向上做伸縮振動產生電荷的過程。PVDF傳感器在厚度方向上的伸縮振動模式為阻尼振動,即傳感器對車輛軸重的響應過程為車輛重力瞬態作用下的阻尼振動的過程。
根據第一類壓電方程,S'3為z方向上的應變量,且S'3有

為柔性常數。在電場為0的情況下為常數,故對于電位移矢量D

不考慮其他方向對z方向形變的影響,由電位移矢量D可以求出z方向上的傳感器表面自由電荷Q

根據阻尼振動的運動學分析,用阻尼振動的運動方程來描述傳感器在z方向上產生的位移,則由方程(7)有
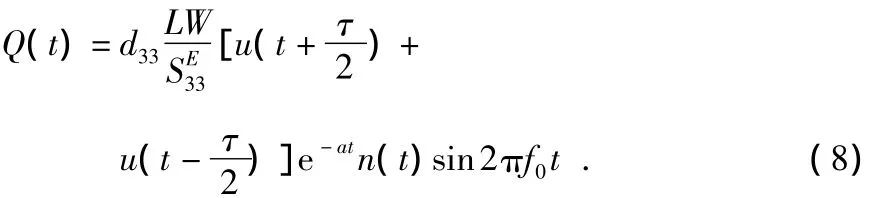
其中

u(t)為單位階躍函數,n(t)為修正因子,e-at為阻尼振動的衰減因子,T0為信號持續時間。通過對信號進行Fourier變換得到信號的頻譜F(ω)

其中,E為常數。
可以看出:信號主要分布在以f0為中心的一個頻率區間,中心頻率f0與信號持續時間T0呈反比。考慮到壓電傳感器和安裝材料的強阻尼性,會給傳感器信號的復頻域帶來-ja的變化,同時由于F(n(t))的影響,信號的頻率區間會向高頻部分擴展,高頻部分的將會形成較長的拖尾。
由以上的分析可以看出:車輛經過PVDF傳感器時,車速越快,信號的持續時間T0越短,信號的中心頻率越高。通過測量最低車速下信號的頻率,可以得到系統產生信號的最低中心頻率。在實際的車輛動態稱重系統中,PVDF壓電傳感器的寬度為6.6 mm,安裝槽寬度為20 mm,可以通過PVDF傳感器和安裝槽寬度估計信號的持續時間T0。取10 km/h的速度為最低車速,信號的持續時間T0在2.37~7.19 ms之間,即信號最低f0在140~422 Hz之間。
研究表明:在車輛動態稱重系統中,車輛動態稱重環境中的噪聲主要為低頻范圍內的噪聲[2]。在車速較低的情況下,干擾信號的頻率約為3~20 Hz[9],幅值變化大約可達10%左右;在車速為60~100 km/h時,路面振動信號的頻率都在0~90 Hz范圍[10]。電路系統中普遍存在的50 Hz工頻干擾也存在于低頻范圍。相對于90 Hz以下的低頻噪聲,PVDF產生的信號主要集中在140 Hz以上高頻范圍,故在設計車輛動態稱重系統的調理電路時,設計高通濾波器,可以在有效地除去低頻噪聲的情況下保留信號的原始信息。
2 實驗稱重系統搭建
整個測量系統的結構如圖2所示。PVDF壓電傳感器采用MEAS公司的Roadtrax BL型I類傳感器,長度為3 m。輸出電纜長為35 m。測試車輛分別選取NISSAN Teana和Mazda 6家用轎車。

圖1 實驗平臺結構圖Fig 1 Structure diagram of experimental platform
PVDF壓電薄膜是電荷敏感元件,其產生的信號為電荷信號[11],在進行測量時需要進行電荷信號到電壓信號的轉換。PVDF壓電薄膜又具有電容特性,其自身有較大的容值[12]。在系統中使用中PVDF壓電傳感器通過同軸電纜輸出,該同軸電纜也存在電阻和電容。在具體設計電荷放大級時,需要使用高精度、高阻抗運放。運放的反饋端采用低電容Cf、高電阻Rf并聯的設計。
3 實驗結果
在實驗平臺的基礎上進行了車輛稱重信號采集。在路面平整、天氣晴朗、無其他車輛經過的環境中進行實驗,并采用高精度直流電源作為信號處理電路供電電源。實驗車輛以 10,20,30,40,50 km/h 左右的速度經過傳感器,用示波器記錄實驗數據,采樣頻率為1.25 MHz。圖2為 NISSAN Teana轎車以時速8.9 km/h經過傳感器產生的典型信號和信號的幅頻譜。
從圖2(a),(b)兩圖中可以看出:時速為8.9 km/h的情況下,Nissan Teana前軸的稱重有用信號周期為T0=5.09 ms。根據之前的理論分析,其信號的中心頻率f0=1/T0,即f0=196Hz。在圖3左圖中可以看出:幅頻譜的中心頻率f=211Hz。同理,從圖2(c),(d)兩圖中可以得到其信號的T0=4.53ms,f0=221Hz,幅頻譜的中心頻率f=224Hz。

圖2 時速8.9 km/h時車輛前、后軸信號及幅頻譜圖Fig 2 Signal and amplitude spectrum of front/rear axle of car at speed of 8.9km/h
分別對10~50 km/h車速下兩輛車得稱重信號中心頻率進行分析,結果如表1所示。從理論分析與實際測量的對比可以看出:阻尼振動模型分析得到的車輛稱重信號中心頻率f0與實際車輛稱重中心頻率f的誤差在10%以內。在誤差允許的范圍內,用阻尼振動模型可以簡潔地估計出車輛稱重信號的中心頻率,為后續的信號處理打下基礎。在車速最低為8.9 km/h的情況下,傳感器產生信號的中心頻率最低為211 Hz,相對于車輛低頻噪聲的最高頻率90 Hz,傳感器產生的信號可以看作一個高頻信號。稱重信號的中心頻率隨著車速的增加而提高,在車速為49.3 km/h時,稱重信號的中心頻率為1735Hz,遠遠大于90Hz的低頻噪聲,完全可以將稱重信號看做一個高頻信號。
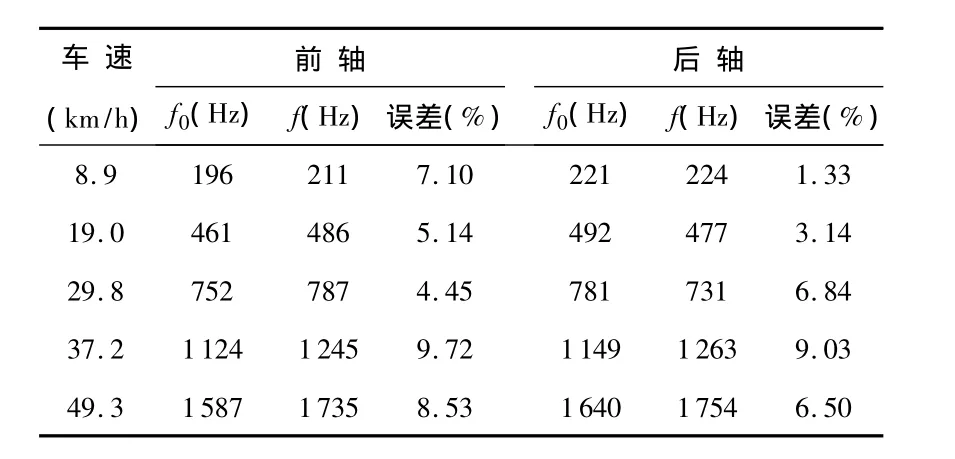
表1 稱重信號中心頻率與理論值對比表Tab 1 Contrast of center frequency and theoretical value of weighting signal
用Matlab設計高通濾波器來對信號進行處理。設計濾波器的通帶截止頻率為90 Hz,阻帶截止頻率為10 Hz。將進行濾波處理后的信號與原信號進行對比,如圖3所示。在車速最低為8.9 km/h的情況下,原始信號與濾波信號的波形幾乎沒有差別。以信號的積分值作為參考標準,比較10~50 km/h車速下兩車稱重原始信號與濾波信號,結果如表2所示。在車速為8.9 km/h的情況下,濾波信號與原始信號存在最高為3.76%的誤差。隨著車速的增加,誤差大大減小,在車速為49.3 km/h的情況下,濾波信號與原始信號的誤差僅為0.04%,此時完全可以忽略濾波對信號完整性的影響。考慮到車速為50 km/h左右時,濾波處理對信號完整性的影響已經可以忽略,無需再討論50 km/h以上的車速。

表2 原始信號與濾波信號對比表Tab 2 Contrast of original signal and filtering signal
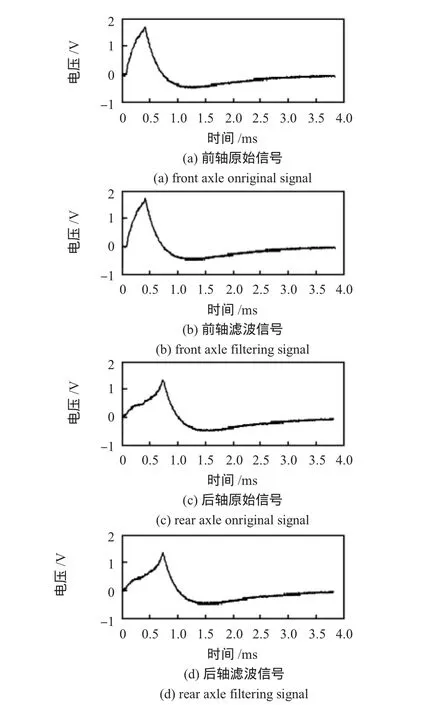
圖3 時速8.9 km/h時車輛前、后軸原始信號與濾波信號圖Fig 3 Original and filtering signal diagram of front/rear axle of car at speed of 8.9km/h
4 結論
本文根據車輛動態稱重的實際情況,采用阻尼振動的模型對車輛經過PVDF壓電傳感器時產生的電信號進行了理論分析,得到該信號的頻譜特點。針對該特點,搭建了PVDF測試電路并設計了實驗平臺,進行了車輛稱重的實際測試。實驗證明:該車輛稱重信號的頻譜以f0為中心分布,主要集中在高頻段。在車速為8.9 km/h的低速情況下,信號的中心頻率f0仍大于干擾噪聲的最高頻率。在稱重系統中,以90Hz為通帶截止頻率設計高通濾波器,可以在硬件層面上除去低頻噪聲,從而提高系統測量精度和實時性。
[1]Ono T.On dynamic weighing of highway vehicles in motion[C]//SICE 2003 Annual Conference,2003:2108 -2115.
[2]Kim S K,Cho I,Lee J H,et al.A new method for accurately estimating the weight of moving vehicles using piezoelectric sensors and adaptive-footprint tire model[J].Veh Syst Dyn,2003,39(2):135-148.
[3]Deesomsuk T,Pinkaew T.Evaluation of effectiveness of vehicle weight estimations using bridge weigh-in-motion[J].The IES Journal Part A:Civil& Structural Engineering,2010,3:96 -110.
[4]Xu Jian,Ma Bin.Investigation of discrete wavelet transform for signal de-noising in weight-in-motion system[C]//International Conference on Future Computer and Communication,2010:769 -772.
[5]Callahan J T,Baruh H.Active control of flexible structures using segmented piezoelectric actuators[C]//Proc of SPIE,1995:630 -643.
[6]Marsili R.Measurement of the dynamic normal pressure between tire and ground using PVDF piezoelectric films[J].IEEE Trans on Instrum Meas,2000,49(4):736 -740.
[7]Kimoto A,Sugitani N,Fujisaki S.A multifunctional tactile sensor based on PVDF films for identification of materials[J].Sensors Journal,2010,10:1508 -1513.
[8]李 遠,秦自楷,周志剛.壓電與鐵電材料的測量[M].北京:科學出版社,1984.
[9]凌 杰,公路動態稱重系統的設計理論研究[D].西安:長安大學,2001.
[10]查文華,洪寶寧,徐 毅.交通荷載下路面振動響應信號的時頻特征分析[J].工程抗震與加固改造,2007,29(4):105 -109.
[11]Yi Jingang,Liang Hong.A PVDF-based deformation and motion sensor:Modeling and experiments[J].Sensors Journal,IEEE,2008,8(4):384 -391.
[12]Toda M,Thompson M L.Contact-type vibration sensors using curved clamped PVDF film[J].Sensors Journal,2006,6(5):1170-1177.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25