小型風力發電系統控制策略的研究
2012-07-25 07:10:34方寧
電氣開關 2012年4期
方寧
(湖南鐵道職業技術學院電氣工程系,湖南 株洲 412001)
1 引言
近年來,小型風力發電機組推廣應用范圍不斷擴大。除了傳統的廣大農牧區用戶應用小型風力發電機組照明看電視以外,由于汽油、柴油價格飛漲,且供應渠道不暢通,內陸、江湖、漁船、邊防哨所、部隊、氣象、微波站等使用柴油發電的用戶,逐步改用風力發電或風光互補發電。此外,生態環保公園、林蔭小道、別墅庭院等地方,也購買安裝小型風力發電機,作為景觀,供人們休閑欣賞[1]。本文對小型風力發電機的三種控制策略進行了研究。
2 能量優化管理集成控制策略[2]
2.1 系統構成
獨立運行的小型風力發電系統一般包括能量產生環節、能量存儲環節、能量消耗環節3部分。該系統采用定槳距風力機直接耦合永磁同步發電機方式,在二極管整流橋和蓄電池之間插入DC/DC變換器實現能量控制。整個系統不使用測風速裝置,發電機轉速根據輸出交流電壓的頻率或幅值與轉速之間對應關系測量。風力機超速保護采用機械折尾翼限速與電氣耗能電阻限速相結合方式,從而簡化系統結構,降低成本,提高運行可靠性。
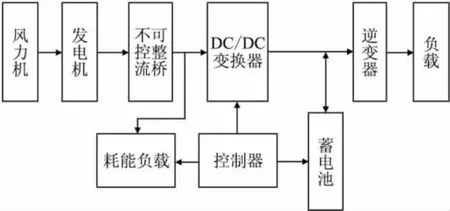
圖1 小型風力發電機結構
2.2 能量流動分析
小型風力發電系統中風力機捕獲能量的傳遞方向始終是單向的,而發電機輸出電能的流向根據外電路的變化有不同的方向。蓄電池的能量流動為兩個方向,依據外電路的不同可以工作在充電或放電狀態,蓄電池的充電和放電過程根據負載情況的不同隨機進行動態調節。由于風能和負載的隨機性,為最大限度地利用風能及保證蓄電池的合理工作狀態,集成控制方案將根據系統的工作狀態,合理調度能量流動。系統運行時,風力發電機輸出功率PE、負載消耗功率PL和蓄電池可以接受的充電功率PB,三者之間關系及相應的控制模式見表1。

表1 小型風力發電機能量流動關系
2.3 工作狀態轉換
隨著風速和負載不斷變化,上述8種工作狀態之間相互轉換,通過檢測對應的電壓和電流可判斷系統所處的工作狀態,圖2給出了小型風力發電系統的工作狀態轉換關系。由于工作狀態轉換是在能量合理調度的基礎上完成的,而工作狀態又包含最大功率跟蹤控制、負載跟蹤控制、蓄電池充放電控制及發電機超速保護控制等控制模式,該能量優化管理集成控制方案可以提高系統能量轉換效率及改善蓄電池的工作狀況,從而實現小型風力發電系統的優化及可靠性運行。

圖2 小型風力發電機工作狀態轉換圖
3 最大功率控制的擾動法[3]
由于風機系統中蓄電池和電容的存在,使蓄電池輸出電壓基本保持恒定,因此調節斬波器輸出電流就實現了對永磁發電機電磁功率的調節,斬波器具有變換阻抗的作用,通過控制斬波器的占空比,可以調節斬波器的輸入電阻,實現發電機輸入、輸出特性與負載阻抗相匹配,使發電機工作在最佳工作點,從而控制風力機轉速,實現最大功率輸出。
風力發電機的輸出特性曲線如圖3所示,從圖中可以看出,最大功率的連線(點劃線)將曲線族分為A和B兩部分,最大功率控制擾動法的基本思想是:在系統中注入小幅正弦波信號,此信號和控制器輸出進行疊加,形成斬波器控制信號;控制器輸出是通過在正弦波信號的極大點和極小點時刻分別對輸出電流采樣,利用采樣值差的積分產生的。
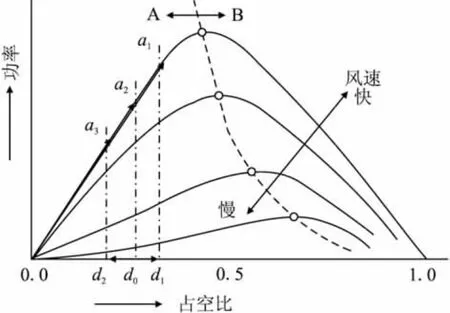
圖3 小型風機的輸出特性
最大功率控制擾動法的基本原理如圖4所示,設正弦波擾動信號的幅值為dm,角頻率為ω,當系統工作A區時,假定系統工作在a0點,其對應的占空比為d0,正弦波信號產生的擾動量在d1和d2之間連續變化,則此時瞬時占空比d為:
d=d0+dmsin(ωt)

圖4 最大功率擾動法控制原理
在輸出電壓恒定時,輸出功率與輸出電流成正比,當測得來自電流檢測回路的電流時,d0由下式決定:

系統工作在A區時,隨著占空比的增大,系統輸出功率增大,此時的占空比d應向頂點方向增大。當系統工作在B區時,隨著占空比的增大,系統輸出功率減小,此時的占空比d應向頂點方向減小。
當測得來自電流檢測回路的電流I1=I2時,Δd=0,這時占空比穩定在最大點上。當系統達到最大點時,輸出電流和擾動信號之間的相位差為90°。利用小信號擾動法可實現系統平均功率達到最大值,而且方法簡單,易于實現。
4 三點比較法控制
三點比較算法在跟蹤穩定性方面是對固定步長的爬山算法和變步長算法的一種結合和改進。由于風力發電系統P—D曲線的單峰性及占空比調整步長值ΔD較小,我們在風力發電系統P—D曲線峰值點附近從左到右依次取三個點,(D1,P1),(D2,P2),(D3,P3)分別對應各工作點的占空比和功率。設D2為初始最大負載功率點對應的占空比值Dmax,DD是一個預先設定的用于占空比步長調整的常量。于是我們會得到如圖5~圖7所示的情形:
(1)當P1<P2且P2≤P3時,MPPT控制單元執行
{D2=D3;D1=D2-ΔD;D3=D2+ΔD},如圖5所示。

圖5 當P1<P2且P2≤P3的情況
(2)當P1<P2且P2>P3時,MPPT控制單元執行
{ΔD=ΔD-DD;D1=D2-ΔD;D3=D2+ΔD},如圖6所示。

圖6 當P1<P2且P2>P3的情況
(3)當P1≥P2且P2>P3時,MPPT控制單元執行
{D2=D1;D1=D2-ΔD;D3=D2+ΔD},如圖7所示。

圖7 當P1≥P2且P2>P3的情況
這種算法在第一種情況和第三種情況時,也即第二工作點的功率值P2離當前風速下對應的負載兩端最大功率值點Pmax較遠時,我們采用類似于爬山算法的固定步長擾動,使工作點功率值能夠快速地接近最大功率值點,提高系統響應的快速性;當第二工作點功率值較為接近當前風速下對應的負載兩端最大功率值點Pmax時,我們采用類似于變步長算法的變步長擾動,使工作點功率值能夠更加精確細致地接近最大功率值點,從而滿足系統精度的要求。
5 結束語
小型風力發電系統作為農村能源的組成部分,它的推廣應用對于改善用電結構,特別是邊遠山區的生產、生活用能,推動生態環境建設諸領域的發展將發揮積極作用,因此具有廣闊的市場前景。風能具有隨機性和不確定性,風力發電系統是一個復雜系統。簡化小型風力發電系統的結構、降低成本、提高可靠性及實現系統優化運行,對于小型風力風力發電系統的推廣具有非常重要意義。
[1]葉杭冶.風力發電機組的控制技術[M].北京,機械工業出版社,2002.
[2]齊志遠.小型風力發電系統能量管理集成控制的研究[D].內蒙古:內蒙古工業大學,2009.
[3]翁翔羿,張曦煌.小型風力發電系統風速追蹤策略的仿真研究[J].計算機仿真,2011,28(5):328 -332.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
故事作文·高年級(2021年12期)2021-12-21 02:32:35
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
