永磁交流伺服自抗擾直接轉矩控制
2012-07-23 06:36:20黃禎祥鄧懷雄
微特電機 2012年11期
黃禎祥,吳 峻,鄧懷雄
(湘潭大學,湖南湘潭411100)
0引 言
與異步電動機相比,永磁同步電動機(以下簡稱PMSM)不需要無功勵磁電流,具有效率高、功率因數高、力矩慣量比大、定子電流和定子電阻損耗小等特點,且轉子參數可測、控制性能好,在中小容量交流伺服系統中得到了非常廣泛的應用[1-2]。PMSM目前的控制方法主要采用矢量控制和直接轉矩控制(以下簡稱DTC)兩種。基于定子電流的矢量控制技術比較成熟,是常用的控制方法。而基于定子磁場的DTC控制從20世紀90年代中期開始應用于異步電機[3],后來通過Zhong L等人的努力,DTC控制成功應用于永磁同步電動機[4-5]。相比矢量控制方法,基于定子磁場的DTC控制可以直接對電機的磁鏈和轉矩進行控制,省略了復雜的坐標變換等單元,并具有對電機參數的依賴性小、控制系統簡單、轉矩響應快等優點。但由于轉子轉速和定子電流的強耦合使系統具有很強的非線性,特別在系統存在不確定性時,這種非線性使系統難以達到高精度伺服控制的要求。
目前解決PMSM精確伺服控制問題,通常采用非線性控制方法,主要有變結構控制、微分幾何和無源性理論等。特別是文獻[6]提出的非線性控制器——自抗擾控制器(以下簡稱ADRC)能實時觀測補償系統的內擾和外擾,給設計帶來了方便。同時ADRC設計不依賴系統的數學模型,有著較好的魯棒性。本文將ADRC應用于PMSM調速系統的DTC控制方案中,用以解決傳統PI控制所無法克服的快速性能與穩態性能之間的矛盾,抑制PMSM在運行過程中由于電機的定子電阻、粘滯摩擦系數和負載轉矩的變化以及其他不可預測的外界擾動對系統轉速所造成的影響,使得系統對系統參數變化和外部擾動具有較強的魯棒性。仿真結果表明,本系統具有抗擾動能力強、動態控制性能優越、控制精度高和動態響應快等特點,對不同參考轉速給定具有更好的適應性。
1 PMSM的直接轉矩控制機理
對于隱極式PMSM,其電磁轉矩與定子磁鏈的表達式分別:
電磁轉矩平衡方程:

由式(1)可知,如果磁鏈一定,則電磁轉矩Te是功角δ(定子磁鏈和轉子磁鏈的夾角)的函數。由式(2)可知,選擇合適的空間電壓矢量可改變定子磁鏈旋轉速度和方向,從而可以瞬時調整功角δ,實現轉矩的動態直接控制。而式(3)表明電機的轉速ω與電磁轉矩Te成積分關系,改變Te,就可通過積分環節實現轉速調節。
PMSM的DTC控制模型中,式(1)~式(3)表面上只使用了定子電阻Rs一個電機參數,準確觀測定子電阻可達到理想的控制性能。但實際上定子電阻因電機的發熱而變化,是時間的函數,很難實時觀測。而只要觀測的定子電阻出現誤差,就會使估計的磁鏈和轉矩出現誤差,從而影響調速效果;同時由于系統存在負載機械摩擦和轉矩擾動等干擾,轉子轉速和定子電流又存在強耦合,系統轉動慣量也具有時變性等,使得伺服系統在低速運行時轉速精度顯著下降。為了提高精度,傳統PI速度控制器為提高靜態開環增益不得不采用較大的積分環節,從而加劇了系統快速性和穩態精度之間的矛盾。同一個PI參數也無法適用于不同的電機轉速,因此對控制精度要求較高的場合,PI控制難以取得令人滿意的調速性能。
2自抗擾控制器設計
自抗擾控制技術是一種實用的控制系統非線性綜合方法。自抗擾控制器主要由跟蹤微分器(TD)、擴展狀態觀測器(ESO)和非線性狀態誤差反饋控制律(NSEFL)三部分組成。自抗擾控制器的設計能處理確定系統和不確定系統的控制問題,在無需知道外擾模型的條件下能很好地對外擾進行抑制,實現控制不用區分系統是否線性,不用辨識,解耦控制只需考慮靜態耦合,容易控制時滯系統,所以它對時變、非線性、強耦合、大時滯等被控對象,均能給出很好的控制效果[7-8]。
設被控對象的狀態方程如下:

式中:b為系統控制量增益;u(t)為系統控制量;f1(x,,…,x(n-1),t)為系統非線性函數;f2(t)為系統未知外擾;x為可觀測狀態量;y為被控對象輸出。

PMSM電磁轉矩平衡方程改寫如下:


由式(7)可以看出,未知擾動與負載轉矩TL的擾動所造成的轉速波動可以在綜合擾動項w(t)中反映出來,為抑制綜合擾動可通過對w(t)進行觀測并補償來實現。擴展狀態觀測器能解決模型未知部分和外部未知擾動綜合對控制對象的影響,為此設計一個擴展的狀態量來跟蹤模型未知部分和外部未知擾動的影響,然后給出控制量進行補償,將控制對象變為普通的積分串聯型控制對象,實現動態系統反饋線性化。下面設計自抗擾控制器來解決這一問題,從而實現PMSM的速度控制。
被控對象PMSM的ADRC方程描述如下:
微分–跟蹤器(TD):

擴張狀態觀測器(ESO):
非線性反饋控制律(NLSEF):
最優控制函數 fal的表達式[4]:

式中:v為ADRC的給定信號;z11為v的跟蹤信號;r為跟蹤速度因子;y為系統輸出;z21為y的跟蹤信號;z22為w(t)的跟蹤信號;ε為誤差信號;α為非線性因子;δ為 ESO濾波因子;β01、β02為輸出誤差校正增益;β1為誤差增益。
具體的控制器結構如圖1所示。
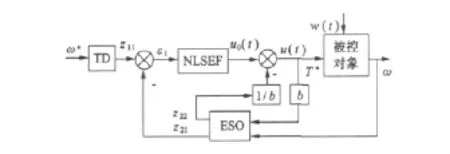
圖1 ADRC控制器結構圖
圖1中ω*、T*分別是速度給定與轉矩給定,ω是系統速度反饋信號,z11是ω*的跟蹤信號,z21是ω的跟蹤信號,z22是擾動w(t)的跟蹤信號。在圖1中,TD為ω*安排了過渡過程,得到了較為平滑的輸入信號,使得系統響應迅速且沒有超調。文獻[9]的研究表明,安排合適的參考軌跡過渡過程是解決傳統PID控制的響應快速性和超調性之間的矛盾的有效辦法,同時使系統的魯棒性、穩定性和適應性也得到了大大的提高;結構中ESO環節對各個狀態變量進行實時估計,同時也對內外擾動(包括負載擾動、轉動慣量和定子電阻的變化以及其它未知擾動)和系統不確定性模型進行精確觀測,實現動態系統的反饋線性化,使被控對象的不確定性在反饋中加以補償,達到重構對象的目的;NLSEF實現對綜合擾動的補償和“小誤差大增益,大誤差小增益”的非線性控制[10],以提高穩態控制精度。
3仿真實驗與分析
為了驗證所設計控制器的有效性,我們根據圖2的DTC控制原理圖在Matlab/Simulink中構造了基于ADRC的DTC控制系統仿真模型,同時也搭建了基于傳統PI控制器的DTC控制系統模型。

圖2 基于ADRC的DTC控制系統
PMSM 相關參數:Rs=1.9 Ω,Lq=Ld=0.01 H,ψf=0.353 Wb,J=7.24 ×10-4kg·m2,B=1.4 ×10-7N·m/(r·min-1),p=2,ωref=1 000 r/min。仿真時ADRC 控制器的參數選定:b=1 381.2,β01= β02=4 000,β1=3,α =0.8,δ=0.05,α1=0.8,δ1=0.04;PI控制器的參數:KP=3,KI=0.45。圖3是系統在不同給定下的轉速響應曲線。結果表明,ADRC相比PI控制具有更快的響應速度和更高的穩態精度,超調大幅度減小;且在不同的轉速給定下ADRC控制器具有更強的適應性,特別在低速運行時體現出了良好的動態性能。
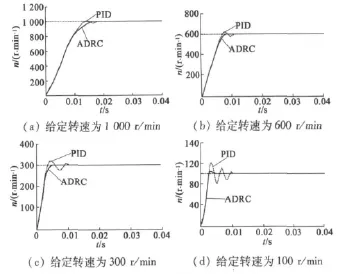
圖3 不同給定時的系統響應對比
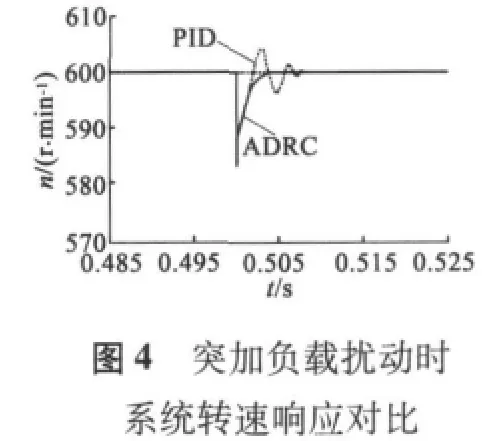
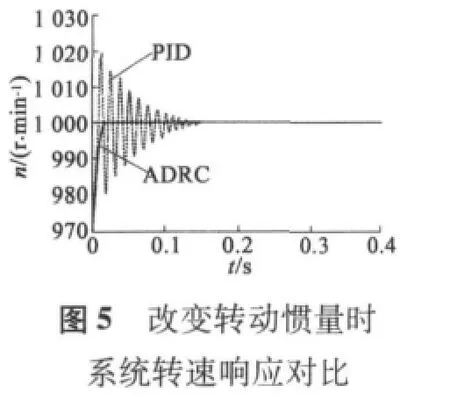
為研究系統對突變負載擾動的抵抗能力,仿真中系統在0.5 s時突然加入一個50%額定轉矩的負載擾動,圖4是ADRC控制與PI控制時對突變負載擾動時轉速的響應曲線,從圖4中可以看出,當負載擾動突變時,ADRC比PI具有更小的轉速變化與更快的恢復時間。圖5為系統轉動慣量變為原來的2倍時的速度響應曲線。傳統的DTC控制由于PI參數未加以調節從而引起了劇烈的振蕩。以上仿真實驗說明ADRC不僅對負載擾動或外界干擾,而且對系統未知參數均具有良好的魯棒性。
4結 語
根據永磁交流伺服直接轉矩控制的模型特點,將ADRC控制器應用于永磁交流伺服系統DTC的調速控制中,較好地抑制了PMSM在運行過程中因系統參數變化與外部擾動所帶來的影響,使得系統具有良好的動態、靜態性能與較強的魯棒性。且在相同的擾動下,相比經典PI控制器在不同的轉速給定下具有更強的適應性和更好的動態控制性能。
[1] 秦憶.現代交流伺服系統[M].武漢:華中理工大學出版社,1995.
[2] 王宏,于泳,徐殿國.永磁同步電動機位置伺服控制系統[J].中國電機工程學報,2004,24(7):151-155.
[3] Takahashi I,Noguchi T.A New Quick-response and High Efficiency Control Strategy of an Induction Motor[J].IEEE Transaction on Industry Applications,1986,22(5):820-827.
[4] Zhong L,Rahman M F.Analysis of Direct Torque Control in Permanent Magnet Synchronous Motor Drivers[J].IEEE Transactions on Power Electronics,1997,12(3):528-536.
[5] Zhong L,Rahman M F.A Direct Torque Cont roller for Permanent Magnet Synchronous Motor Drivers[J].IEEE Transactions on Energy Conversion,1999,14(3):637-642.
[6] 韓京清.自抗擾控制器及其應用[J].控制與決策,1998,13(1):19-23.
[7] 韓京清.從PID技術到“自抗擾控制”技術[J].控制工程,2002,9(3):13-18.
[8] 馮光,黃立培,朱東起.采用自抗擾控制器的高性能異步電動機調速系統[J].中國電機工程學報,2001,21(10):55-58.
[9] 陳誠,李世華,田玉平.永磁同步電機調速系統的自抗擾控制[J].電氣傳動,2005,35(9):13-16.
[10] 夏長亮,李正軍,楊榮,等.基于自抗擾控制器的無刷直流電機控制系統[J].中國電機工程學報,2005,25(2):82-86.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25