基于數(shù)據(jù)的PID設(shè)計方法比較
2012-07-06 02:02:38楊鑫
重慶理工大學(xué)學(xué)報(自然科學(xué)) 2012年5期
楊 鑫
(重慶理工大學(xué)化學(xué)化工學(xué)院,重慶 400054)
在過去的幾十年里,基于模型的PID控制器設(shè)計研究發(fā)展迅速,提出了很多設(shè)計方法,例如連續(xù)循環(huán)法[1]、直接合成法[2]、內(nèi)模控制法 (internal model control,IMC)[3-6]等[7-11]。其中 IMC-PID是應(yīng)用最廣泛的方法[11],通過調(diào)節(jié)PID設(shè)計算法中的λ參數(shù),可得到很好的控制效果。但是此過程需要先得到過程模型,并需要通過模擬或是工廠實驗來調(diào)節(jié)其參數(shù),很費時間,工程代價也比較高。
為克服上述缺點,Campi等[12]提出了一種基于過程輸入輸出數(shù)據(jù),不需要建立過程模型的PID控制器設(shè)計方法——虛擬參考反饋參數(shù)整定法(virtual reference feedback tuning,VRFT)。但是該方法的應(yīng)用只限于離散時間系統(tǒng)[12-13]。為此Yang等[14-15]將VRFT方法發(fā)展到連續(xù)時間系統(tǒng),提出了一種基于數(shù)據(jù)的PID控制器的設(shè)計方法。此方法不需要建立過程模型和進行反復(fù)實驗來調(diào)節(jié)控制器參數(shù),取得了很好的設(shè)計效果。Yang等[14-15]的研究表明,參考模型的選取對基于數(shù)據(jù)的PID控制器設(shè)計很重要。為研究不同參考模型對控制器設(shè)計效果的影響,本文采用2個參考模型對過程進行基于數(shù)據(jù)的PID控制器設(shè)計,并對計算結(jié)果進行分析比較。
1 基于數(shù)據(jù)的PID控制器設(shè)計
在基于數(shù)據(jù)的PID控制器設(shè)計中,需要用到一個參考模型,如圖1所示。

圖1 參考模型
參考模型T(s)表示一個反饋控制系統(tǒng),其中包含了一個線性過程G(s)和PID控制器C(s),如圖2所示。
控制器的設(shè)計目標是令圖2中的反饋控制系統(tǒng)盡可能接近事先選定的圖1中的參考模型T(s)。
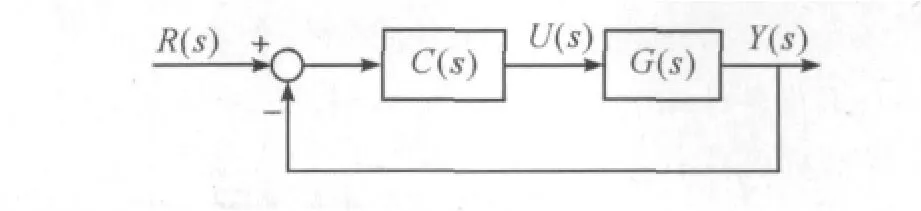
圖2 反饋控制系統(tǒng)
過程G(s)未知,但是其過程輸入輸出數(shù)據(jù)U(s)和Y(s)可以通過開環(huán)實驗得到。令s=jω,通過對過程輸入輸出數(shù)據(jù)進行離散傅里葉變換,得到在不同頻率下的輸入輸出數(shù)據(jù) U(jωi)和Y(jωi),其中是離散傅里葉變換計算需要的頻率范圍的上限。最后控制器的設(shè)計目標變?yōu)樵陬l率范圍 [ 0 ωmax]內(nèi)的最小化問題,見方程(1)。推導(dǎo)過程詳見文獻[14-15]。

其中:Re(·)和Im(·)分別表示復(fù)數(shù)矩陣(或者向量)的實部和虛部;θ是參考模型T(s)的調(diào)節(jié)參數(shù);Kc是比例增益;τI是積分時間;τD是微分時間。
對給定的θ,通過最小二乘法可得到方程(1)的解:

在給定的θ范圍內(nèi),通過尋找最小的 J(θ),也就是J(θ*),其相應(yīng)的解W*(θ*)可用來計算PID控制器參數(shù)。
2 參考模型T(s)及ωmax
本文選取了2個參考模型,第1個模型是基于環(huán)路傳遞方程L(s)的參考模型[9],另一個模型是二階加純滯后模型(SOPDT)[8]。
因為ωmax跟控制器設(shè)計緊密相關(guān),可將ωmax設(shè)定為反饋系統(tǒng)的帶寬頻率ωb。由于過程模型和控制器未知,因此計算ωb的唯一方法是通過參考模型[14-15],見式(8)。
2.1 參考模型1及ωmax

參數(shù)θ的范圍包含過程的時間延遲范圍,并與方程(1)的優(yōu)化求解有關(guān)。將參考模型1代入式(8),對每個 θ,ωb可通過式(10)得到[14]。

2.2 參考模型2及ωmax
第2個參考模型是二階加純滯后模型:

在控制器設(shè)計中,參考模型[15]采用 τ =0.5θ,ξ=0.9或1.0。既然 τ 是 θ的函數(shù),ξ是固定的,因此方程(1)也與參數(shù)θ相關(guān),θ的范圍同樣包括過程的時間延遲范圍。
將參考模型2代入式(8),對每個 θ,得到

基于數(shù)據(jù)的PID控制器設(shè)計方法分為以下幾步來執(zhí)行:
步驟1 從開環(huán)實驗中得到過程輸入輸出數(shù)據(jù)u(t)和y(t),并且給定θ的范圍。
步驟2 求解方程(1)。對每個θ,根據(jù)參考模型可得到相應(yīng)的ωb,令ωmax=ωb。
步驟3 用離散傅里葉變換得出過程輸入輸出數(shù)據(jù)的頻率響應(yīng) U(ωi)和Y(ωi)。
步驟4 重復(fù)步驟2和3,直到在給定的θ范圍內(nèi)得到最小的J,其相應(yīng)的最優(yōu)結(jié)果W*可用來計算得到最佳的PID控制器參數(shù)。
3 算例

圖3 輸入輸出數(shù)據(jù)(G1(s))
通過使用相同的輸入輸出數(shù)據(jù)和θ范圍,分別用上述2個參考模型設(shè)計得到了PID控制器。圖4比較了控制器的目標單位階躍伺服響應(yīng)。表1列出了控制器參數(shù)和其控制響應(yīng)的絕對誤差積分(IAE)。由此看出,采用基于L(s)的參考模型得到的控制器要比采用2階加純滯后模型T(s)得到的控制器產(chǎn)生的響應(yīng)更快,但是過沖更大一點,振蕩也稍多一點。從IAE結(jié)果比較看來,用這2個參考模型設(shè)計得到的控制器性能很相似。

表1 基于數(shù)據(jù)的PID控制器設(shè)計(G1(s))

圖4 基于數(shù)據(jù)的PID控制器的目標單位階躍伺服響應(yīng)(G1(s))
除了第1個例子的G1(s),也對下面所列的其他10個過程進行比較研究。對每個過程,采用相同的輸入輸出數(shù)據(jù)和θ范圍,用這2個參考模型分別設(shè)計了PID控制器。圖5比較了控制器產(chǎn)生的目標單位階躍伺服響應(yīng)。通過比較可以看出,用基于L(s)參考模型設(shè)計的控制器要比第2個參考模型T(s)響應(yīng)稍快,但是過沖稍微大一點。表2比較了控制器參數(shù)和其產(chǎn)生的控制響應(yīng)的IAE數(shù)值。從IAE的比較來看,用這2個模型設(shè)計的PID控制器性能相當(dāng)。


表2 基于數(shù)據(jù)的PID控制器設(shè)計(G2(s)-G11(s))

圖5 基于數(shù)據(jù)的PID控制器的目標單位階躍伺服響應(yīng)(G2(s)-G11(s))
4 結(jié)束語
介紹了在連續(xù)時間系統(tǒng)下基于數(shù)據(jù)的PID控制器的設(shè)計方法,并研究比較了參考模型對該設(shè)計方法的影響效果。通過采用2種不同形式的參考模型來設(shè)計基于數(shù)據(jù)的PID控制器,結(jié)果表明,設(shè)計得到的控制器性能相當(dāng)。也就是說,這2種參考模型都可以用來設(shè)計基于數(shù)據(jù)的PID控制器。該設(shè)計方法相對基于模型的IMC-PID控制器設(shè)計方法來說,不需要事先確定過程模型,也不需要迭代實驗來找出最佳的控制器調(diào)節(jié)參數(shù),從而節(jié)省了時間,降低了工程成本。
[1]Ziegler J G,Nichols N B.Optimum settings for automatic controllers[J].Transactions of ASME,1942,64:759-768.
[2]Chen D,Seborg D E.PI/PID controller design based on direct synthesis and disturbance rejection[J].Industiral and Engineering Chemistry Research,2002,41:4807-4822.
[3]Garcia C E,Morari M.Internal model control.1.a unifying review and some new results[J].Industrial and Engineering Chemistry Process Design and Development,1982,21:308-323.
[4]Chien I L,F(xiàn)ruehauf P S.Consider IMC tuning to improve controller performance[J].Chemical Engineering Progress,1990,56:33-41.
[5]Lee Y,Park S,Lee M,et al.PID controller tuning for desired closed-loop responses for SI/SO systems[J].AIChE Journal,1998,44:106-115.
[6]Skogestad S.Simple analytic rules for model reduction and PID controller tuning[J].Journal of Process Control,2003,13:291-309.
[7]?str?m K J,H?gglund T.PID Controllers:Theory,Design and Tuning[M].North Carolina,USA:International Society for Measurement and Control,1995.
[8]Wang Q G,Hang C C,Bi Q.A frequency domain controller design method[J].Chemical Engineering Research and Design,1997,75:64-72.
[9]Huang H P,Jeng J C.Monitoring and assessment of control performance for single loop systems[J].Industiral and Engineering Chemistry Research,2002,41:1297-1309.
[10]O’Dwyer A.Handbook of PI and PID controller tuning rules[M].[S.l.]:Imperial College Press,2006.
[11]Li Y,Ang K H,Chong G C Y.Patents,software and hardware for PID control—An overview and analysis of the current art[J].IEEE Control Systems Magazine,2006,26:42-54.
[12]Campi M C,Lecchini A,Savaresi S M.Virtual feedback reference tuning(VRFT):a new direct approach to the design of feedback controllers[C]//Proceedings of 39rd IEEE Conference on Decision and Control.Sydney:IEEE,2000:623-629.
[13]Kansha Y,Hashimoto Y,Chiu M S.New results on VRFT design of PID controller[J].Chemical Engineering Research and Design,2008,86:925-931.
[14]Yang X,Xu B,Chiu M S.PID Controller Design Directly from Plant Data[J].Industrial engineering and cheimistry research,2011,50:1352-1359.
[15]Yang X,Xu B,Chiu M S.A Data-Based Approach to PID Controller Design[C]//the 5th International Symposium on Design,Operation and Control of Chemical Processes,PSE Asia .Singapore:[s.n.],2010.
[16]Skogestad S,Postlethwaite I.Multivariable Feedback Design:Analysis and Design[M].New York:Wiley,1996.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
