無人旋翼機轉彎飛行導航控制研究
2012-07-04 11:28:38王道波盛守照
電光與控制 2012年3期
陳 淼, 王道波, 盛守照, 張 元
(1.南京航空航天大學自動化學院,南京 210016;2.中國人民解放軍94032部隊,甘肅 武威 733003)
0 引言
無人駕駛自轉旋翼機(簡稱無人旋翼機)是一種以自轉旋翼作為升力面,螺旋槳推/拉力為前進動力的旋翼飛行器[1],具有其獨特的優點:可以短距離起飛著陸且起飛著陸的速度很低,容易保證起飛著陸的安全;操縱靈活,無動力下滑能力強,飛行中不會失速[2];旋翼機結構簡單,不需安裝昂貴笨重的減速器等傳動機構,也不需要復雜的槳距/油門協調操縱機構以及液壓助力系統等,且自轉旋翼氣動效率高,自轉工作狀態好,振動水平和噪聲都比直升機小[3-4]。
旋翼機早于直升機出現,但因其無法懸停導致被直升機取代。直到20世紀90年代,旋翼機因其許多相對優勢又重新獲得開發并應用,截至目前美國警方已裝備Hawk-4型有人駕駛自轉旋翼機[4],國內亦有航空愛好者自行制作簡易的有人駕駛自轉旋翼機,并已成功飛行,但尚未無人化。旋翼無動力是旋翼機與直升機最大的區別,因此它無法垂直起飛,需靠發動機推動/牽引向前滑跑獲得速度,旋翼經來流吹動旋轉獲得足夠拉力拉起飛機方能起飛。但除了無法垂直起飛,旋翼機有著直升機不可比擬的優點,它在飛行過程中,旋翼始終處于自轉狀態不會失速,即使發動機空中停車,旋翼也會在相對氣流的作用下自轉,保證飛機安全著地;此外,自轉旋翼是靠風力驅轉的,運用空氣動力學原理分析,在槳盤平面內,部分區域提供驅轉扭矩,部分區域提供阻轉扭矩,兩部分扭矩相互平衡時,旋翼轉速達到穩定[4],因此,與發動機驅轉旋翼相比,自轉旋翼傳到機身上的反扭矩非常小,在工程上可以忽略不計,故而自轉旋翼機不需要像直升機那樣安裝尾槳來平衡旋翼扭矩。在很多不要求懸停的場合,自轉旋翼機憑借其低成本、經濟、安全等優勢完全可以取代直升機。作為風轉旋翼,與驅轉旋翼相比也有不足,諸如操縱滯后性強、強非線性等。另外,就旋翼機控制技術來講,國內航空愛好者自行制作的簡易旋翼機,也只是依靠人為經驗操縱進行了近地飛行,尚未上升到飛行控制技術研究的高度,而且,國內目前也尚未見關于無人化旋翼機研制的報道。因此,開展無人旋翼機飛行控制技術研究具有重要意義。
協調轉彎是無人飛行器常用飛行模態,尤其在對地面目標進行盤旋偵察時更顯必要性。協調轉彎是指飛行器在水平面內連續改變飛行方向,并能保持高度不變的一種轉彎方式。飛行器進行轉彎飛行時,滾轉運動與偏航運動并不獨立從而產生側滑角,使飛行阻力增大、乘坐品質變差,不利于機動[5],需克服或消除側滑實現協調轉彎。由于旋翼機是以旋翼操縱機體橫滾,因此其橫側向特性更接近于直升機,目前關于直升機轉彎導航控制已有一些研究[6-8],無人旋翼機橫側向控制技術研究目前尚未見報道。旋翼機與直升機畢竟還有不同之處,故有必要對無人旋翼機飛行控制作專門研究。
轉彎飛行導航研究無人旋翼機向任意目標航點或航線飛行的導航控制策略,當指令航點或航線不在當前航向上時,如何控制無人旋翼機以最優姿態實現轉彎飛行就顯得非常重要。無人旋翼機協調轉彎飛行的關鍵是高度保持和航跡的修正,本文提出一種利用航跡側偏距離及側偏速度反饋控制的協調轉彎飛行策略,并對某無人旋翼機原理樣機進行了地面仿真試驗。
1 無人旋翼機轉彎飛行受力分析
本文采用文獻[9]坐標系,無人旋翼結構及平直飛行時縱向受力情況如圖1所示。該旋翼機采用主支撐架、全動垂尾、無平尾、前三輪著地,后輪懸空式設計。圖1所示為側視圖,兩主輪重合,在靜止狀態下,主支撐架垂直于地面,螺旋槳發動機及旋翼安裝在主支撐架上,由兩側兩個主輪共同支撐,前輪輔助支撐,發動機推力在飛機對稱平面內且與機體軸縱軸平行,兩片槳葉蹺蹺板式旋翼,槳距角固定安裝。在重心配置上采用高重心配置,即發動機推力提供抬頭力矩,旋翼拉力提供低頭力矩。
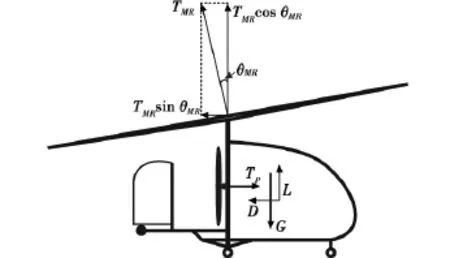
圖1 某無人旋翼機縱向受力分析Fig.1 Longitudinal force analysis of an unmanned rotorcraft
圖中:θMR為旋翼槳盤與機體軸的夾角,若機身迎角為α,則槳盤迎角為αMR=α+θMR;旋翼拉力TMR垂直于槳盤向上;發動機推力Tp在機體縱向對稱面內與機體軸x軸平行;G為飛機重力;L和D分別為機身所受的氣動升力與阻力,作用在氣動焦點上,其大小取決于飛行速度V,可表示為
式中:ρ為空氣密度;CL為升力系數;CD為阻力系數;S為氣動參考面積。旋翼拉力TMR大小與飛行速度及槳盤迎角有關,并且與二者呈非線性關系,即

經試驗驗證:在操縱范圍內,旋翼拉力隨槳盤迎角以及前飛速度的增大而增大,其非線性關系曲線可以通過吹風試驗[10]以及成本較低的地面拉跑試驗獲得。
無人旋翼機轉彎飛行導航中,偏航角及航跡偏轉角是主要控制目標,控制偏航角以克服或消除側滑角,控制航跡偏轉角是為了控制速度方向與規劃航跡保持一致,以達到航跡跟蹤效果。
由物理學勻速率圓周運動知:物體作勻速率圓周運動,需具備恒定的向心力。因此無人旋翼機實現協調轉彎飛行須滿足:
1)旋翼拉力在豎直方向上的分力與旋翼機所受重力相等;
2)旋翼拉力在航跡線速度方向上的分力與空氣阻力及發動機推力平衡;
3)旋翼拉力大水平方向的分力應指向圓弧航跡的圓心,與飛機轉彎受到的離心力相等。
縱向及橫側向受力分別如圖1和圖2所示。
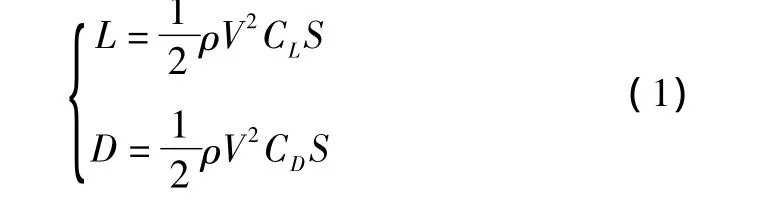
圖2 某無人旋翼機橫側向受力分析Fig.2 Lateral force analysis of an unmanned rotorcraft
圖2中,φ為滾轉角。為研究無人旋翼機轉彎時對圓弧航跡的跟蹤效果,設無人旋翼機進行定高度順時針盤旋飛行,盤旋半徑為R,速度為V,如圖3所示。
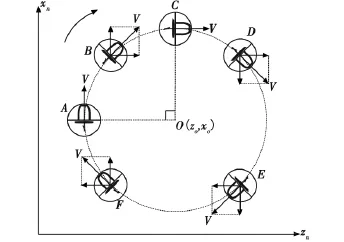
圖3 轉彎飛行速度分解Fig.3 Velocity resolution in turning flight
從圖3中可以看出,需要在盤旋過程中不斷地改變旋翼機速度方向(航向)使旋翼旋轉平面始終向圓心方向傾斜,但是大小不變,以平衡各方向的力,保持盤旋航跡。由式(2)可得,旋翼拉力大小取決于飛行速度和槳盤迎角,故在盤旋過程中,要保持旋翼拉力大小不變,需穩定飛行速度和槳盤迎角,但旋翼機在盤旋過程中不斷改變航向,而且機身相對盤旋圓心有個滾轉角,故縱橫向之間有耦合。由空間幾何關系可知,飛機順時針盤旋有正滾轉角φ,俯仰角θ和偏航角ψ之間相互影響關系為

針對該情況,在控制律設計中可采用前饋補償實現縱橫向解耦[11]。一方面,隨著偏航角的不斷改變,機身俯仰角也不斷改變,引起高度的變化,故而需不斷調整槳盤迎角,修正飛機俯仰姿態以穩定飛行高度;另一方面,調整槳盤迎角也改變了旋翼拉力在縱向平面內沿機體軸x軸方向上的分力,從而改變飛行速度,進而又改變旋翼拉力,因此需不斷調整發動機推力,配合旋翼的操縱以穩定前飛速度。綜上所述,無人旋翼機縱橫向之間存在著強烈的耦合,實現定高度盤旋飛行需滿足
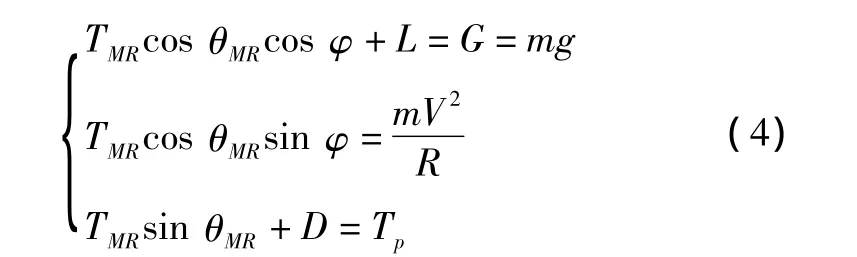
式中:m為旋翼機質量;g為重力加速度;TMR為旋翼拉力;V為飛行速度;R為轉彎半徑;L和D分別為機身所受的氣動升力與阻力。
2 轉彎飛行導航分析
在設計導航控制律時,習慣上以導航坐標系為基準。在順時針盤旋過程中,無人旋翼機從圓弧航跡的一點飛到另一點,線速度V的方向改變一個角度,其大小等于飛過的圓弧對應的圓心角。以各個坐標點為例進行分析,將線速度V分解在導航坐標系的xn軸和zn軸上。如圖3所示,設圓弧航跡的圓心為O(zo,xo),給定偏航角ψg(t)(定義為機體軸與導航坐標系xn方向的夾角,在盤旋飛行過程中,偏航角指令是連續變化的)。
分析各航點速度方向與偏航角指令:
1)當無人旋翼機飛行到A點時,偏航角指令ψ(t)=0°,將V分解到xn軸和zn軸方向得Vxn=Vcos ψ=V 為正值,Vzn=Vsin ψ =0;
2)當無人旋翼機飛行到B點時,偏航角指令ψ∈[0°,90°],將 V 分解到 xn軸和 zn軸方向得 Vxn=Vcos ψ為正值,Vzn=Vsin ψ為正值;
3)當無人旋翼機飛行到C點時,偏航角指令ψ=90°,將V分解到xn軸和 zn軸方向得 Vxn=Vcos ψ=0,Vzn=Vsin ψ =V 為正值;
4)當無人旋翼機飛行到D點時,偏航角指令ψ∈[90°,180°],將 V 分解到 xn軸和 zn軸方向得 Vxn=Vcos ψ 為負值,Vzn=Vsin ψ 為正值;
5)當無人旋翼機飛行到E點時,偏航角指令ψ∈[-90°,-180°],將 V 分解到 xn軸和 zn軸方向得Vxn=Vcos ψ為負值,Vzn=Vsin ψ為負值;
6)當無人旋翼機飛行到F點時,偏航角指令ψ∈[0°,-90°],將 V 分解到 xn軸和 zn軸方向得 Vxn=Vcos ψ 為正值,Vzn=Vsin ψ為負值。
綜上所述,順時針盤旋時:Vxn=Vcos ψ,Vzn=Vsin ψ。逆時針盤旋時符號相反。由此得理想狀況下轉彎飛行導航控制律為

式中,符號函數sgn(+)表示順時針轉彎為正,逆時針轉彎為負。
3 航跡側偏修正
以上理想盤旋飛行狀況下的導航控制律,沒有考慮受到干擾后的側偏修正問題,下面針對這個問題進行分析。
如圖4所示,設旋翼機沿圓弧航跡從點A(zA,xA)順時針飛到點D(zD,xD),圓弧航跡對應的圓心位置為O(zo,xo)。受擾動偏離航跡,當前位置為 P(z,x)。令旋翼機在位置P(z,x)偏離航跡的距離為d,側偏速度為Vd,速度方向偏離指令航向Δψg。定義側偏距離d為無人旋翼機當前位置到圓弧航跡圓心的距離與盤旋半徑之差,d的正負號表示偏離圓弧外或者圓弧內,d大于零時表示無人直升機偏離到圓弧外,d小于零時表示無人直升機偏離到圓弧內;側偏速度Vd為無人旋翼機當前速度在圓弧徑向的分量,規定側偏速度遠離圓弧航線為正。側偏距離d和側偏速度Vd的計算式分別為
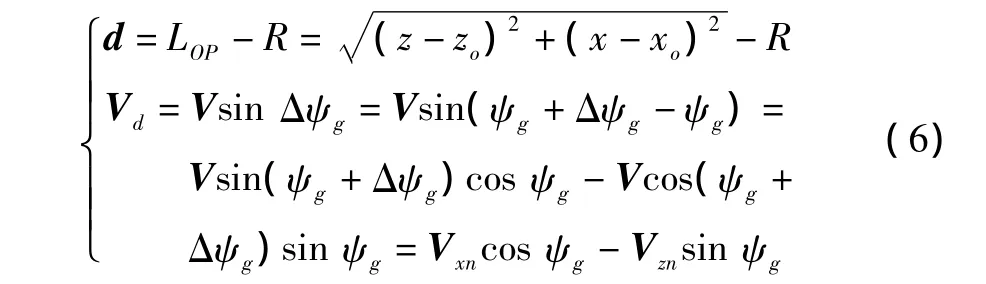
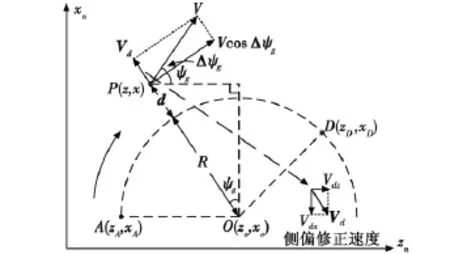
圖4 側偏修正Fig.4 Lateral aberrancy tuning
旋翼機在飛行方式上與常規飛機類似,要求機體軸與速度軸盡量保持一致以減小或消除側滑。當旋翼機在航跡上出現側偏時,一方面應操縱槳盤橫滾使機體向航跡側傾,另一方面相應調整航向,盡量減小或消除側滑。本文的側偏修正策略為:根據側偏距離和側偏速度,實時解算給出側偏修正速度,將修正速度在導航坐標系中分解(圖4中Vdx與Vdz),再與給定導航控制律(5)疊加,通過矢量計算得出修正后的速度大小與方向,指引航向的修正,使無人旋翼機回到給定圓弧航跡上。由此可得,側偏修正算法分兩步進行:
1)計算無人旋翼機偏離航跡的側偏距離矢量d和側偏速度Vd,給出修正速度Vd=k1d+k2Vd,其中k1和k2根據飛機性能參數整定,Vd的方向指向圓弧航線,與圓弧徑向一致;
2)分別將側偏修正速度Vd和指令速度Vg分解到導航坐標系,再分別相加作為速度控制回路的指令信號,Vd在導航坐標系的分量為

綜上分析,修正后的轉彎飛行導航控制律為
4 導航控制模式整合
本文研究的無人旋翼機固定高度盤旋導航控制包括平面導航和高度導航兩個部分,因此需要對全部控制回路,包括高度控制回路、速度控制回路和航向控制回路進行整合,而不是簡單的“綜合”,是為了表達合三為一的思想,將相互之間存在耦合的控制回路合為一個整體,而不是簡單的拼湊,從而使控制模式更加科學合理。
高度導航是由導航控制系統根據高度傳感器測量的高度值與給定高度比較,產生控制量操縱發動機推力和槳盤俯仰以保持高度。無人旋翼機高度主要依靠旋翼拉力在豎直方向上的分力與重力的平衡關系來控制,而旋翼拉力取決于槳盤迎角與前飛速度。當飛機在盤旋過程中受擾動或橫側向耦合等因素導致高度改變,應及時操縱槳盤迎角改變旋翼拉力在豎直方向上的分力,而改變槳盤迎角也改變了旋翼拉力在前飛速度方向上的分力,若發動機推力未及時改變,則速度方向上的合力就發生了改變,導致前飛速度改變,反過來又改變了旋翼拉力,故在縱向平面內,發動機應與槳盤聯動操作,使旋翼獲得的拉力在豎直及前飛速度方向上的分力分別與飛機重力及發動機推力平衡,以保持高度及前飛速度穩定。
平面導航要求無人旋翼機在固定高度平面內對圓弧航跡能達到較好的跟蹤效果,要求旋翼機能夠按照給定航向,使機體軸與圓弧切線保持一致,通過協調轉彎控制消除側滑使速度軸與機體軸保持一致。當受到擾動飛機偏離航跡時,根據當前位置與速度矢量,依據式(6)計算側偏修正,再與當前速度矢量疊加給出橫側量修正量,使飛機回到預定航跡。綜上所述,給出無人旋翼機固定高度盤旋導航控制及高度控制策略如圖5所示。
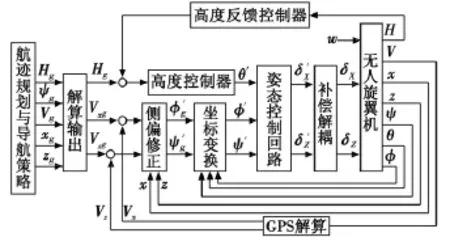
圖5 盤旋導航策略Fig.5 Circle navigating strategy
本文研究的無人旋翼機固定高度盤旋導航,在高度導航部分要求高度跟蹤與速度跟蹤,平面導航部分要求航向跟蹤、位置跟蹤與速度跟蹤,即包含了5個給定量 Hg、Vg、ψg、xg及 zg,如圖 5 所示,其中航向給定 ψg和位置給定(zg,xg)隨著圓周角呈周期變化。給定量經解算輸出后轉化為在導航坐標系中的分量,與當前速度比較,結合當前位置(z,x),經過側偏修正后給出航向給定量。以上計算過程均是在導航坐標系中解算的,通過坐標變換轉移到機體坐標系內,再經過姿態控制回路給出操縱量。傳統的導航控制策略,在信號進入位置回路前,先從導航坐標系轉換到機體坐標系,傳感器返回信號時再從機體坐標系轉換回導航坐標系。本文通過GPS解算測出飛機在導航坐標系中的當前速度,通過反饋比較修正后再在速度控制回路內進行坐標系轉換,僅需一次轉換,使控制算法更加簡潔。通過姿態控制回路給出縱向操縱量和橫側向操縱量,其中包含發動機油門舵 δT和槳盤俯仰舵 δe,包含方向舵δr和槳盤橫滾舵δa,再經過補償解耦得到最終的操縱量。
5 地面半實物仿真
本文無人旋翼機重150 kg,機身長4.3 m,單片槳葉長4 m。令文中導航坐標系zn向為東向,xn向為北向。飛機當前位置為導航坐標系原點,沿正北方向起飛,以3.5 m/s爬升率爬升到350 m的高度,再以14 m/s的速度平直前飛。當飛行到位置(0,2100 m)時,繞點(200 m,2100 m)作半徑為200 m的盤旋,盤旋一周后,繼續向正北方向平直飛,整個盤旋過程高度保持在350 m。仿真曲線如圖6、圖7所示。
圖6和圖7為盤旋過程飛行航跡,圖8中飛行高度的指令以斜坡形式給出。
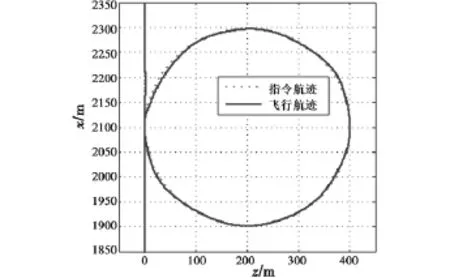
圖6 平面航跡Fig.6 Plane flight path
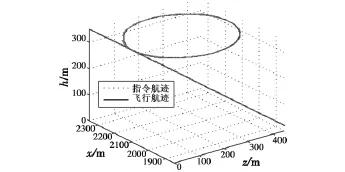
圖7 三維航跡Fig.7 Three- dimensional flight path
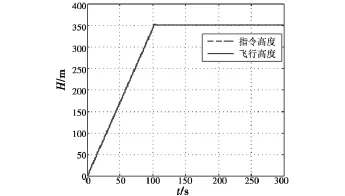
圖8 飛行高度Fig.8 Flight height
旋翼機進入盤旋狀態后,線速度為14 m/s,盤旋半徑為200 m,則盤旋周期為:T=?89.76 s。
盤旋一周,航向角以勻角速率改變360°,則航向角速率為:r=?4.01(°)/s。
盤旋過程中,北向速度按余弦規律變化,東向速度呈正弦周期變化,從圖9~圖11仿真結果來看,各輸出量均能較好地跟蹤給定指令。
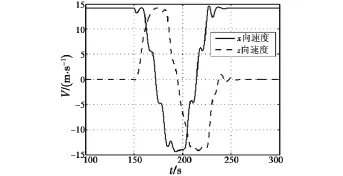
圖9 速度Fig.9 Velocity
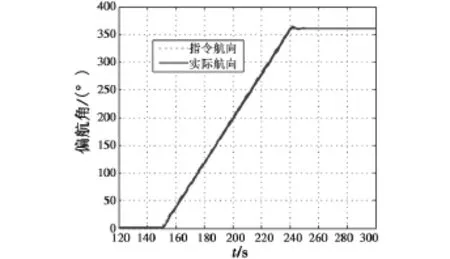
圖10 偏航角Fig.10 Yaw
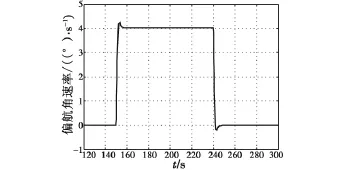
圖11 偏航角速率Fig.11 Yaw rate
6 結語
自轉式旋翼機是一種古老又新興的飛行器,其飛行特征有與直升機及固定翼飛機相似的地方,也有其獨特的地方,橫側向控制是飛行控制不可缺少的一部分,因此開展無人旋翼轉彎飛行導航控制研究具有重要意義。本文通過對某型無人旋翼機特性進行了分析,提出了在轉彎過程中運用側向偏移和側偏速度進行側偏修正,達到良好的航跡跟蹤效果,半物理仿真也說明了導航策略的有效性。
[1]陸洋,李建波,朱清華.自轉旋翼機配平及操縱響應特性[J].南京航空航天大學學報,2008,40(5):577-578.
[2]LEISHMAN J G.Development of the autogyro:A technical perspective[J].Journal of Aircraft,2004,41(4):765-781.
[3]王煥瑾,高正.自轉旋翼的氣動優勢和穩定轉速[J].航空學報,2001,22(4):337-338.
[4]朱清華.旋翼機總體設計的幾個問題[J].航空科學技術,2006,5:29-30.
[5]SARIPALLI S,SUKHATME G S,MONTGOMERY J F.An experimental study of the autonomous helicopter landing problem[J].Springer Tracts in Advanced Robotics,2003(5):466-475.
[6]張學軍.直升機穩定轉彎飛行中的運動學問題研究[J].海軍航空工程學院學報,2006,21(2):234-240.
[7]邢小軍,閆建國.直升機全包線協調轉彎控制律設計及仿真[J].飛行力學,2011,29(1):42-45.
[8]楊俊鵬,祝小平.無人機傾斜轉彎非線性飛行控制系統設計[J].兵工學報,2009,30(11):1504-1509.
[9]宮林.無人機起飛與降落的控制技術[D].南京:南京航空航天大學,2009.
[10]朱清華.自轉旋翼飛行器總體設計關鍵技術研究[D].南京:南京航空航天大學,2007.
[11]黃一敏,郭鎖鳳.直升機控制系統的內/外回路設計概念及其應用[J].南京航空航天大學學報,1999,31(3):287-292.