基于IEEE 802.16d的物理層仿真及幀同步算法研究
2012-06-25 03:31:20趙曉燕崔麗珍
電視技術 2012年3期
關鍵詞:符號
趙曉燕,崔麗珍
(內蒙古科技大學信息工程學院,內蒙古 包頭 014010)
由于WiMAX能在一點對多點的視距(LOS)環境或非視距(NLOS)環境下,提供長距離、高速率的數據傳輸,同時還具有一定范圍內的移動性,并且在部署、配置、安全性、QoS、長距離覆蓋等方面的優勢也很突出,因而成為下一代寬帶無線接入主流技術之一[1]。而實現這一切的關鍵在于WiMAX物理層采用了OFDM/OFDMA技術[2]。該技術具有頻帶利用率高、抗多徑衰落等優點,但較之單載波技術,OFDM對同步誤差更為敏感。一旦失步,引起的符號間干擾(ISI)和子載波間干擾(ICI)將大大削弱OFDM的優點[3-4],所以同步對OFDM的實現至關重要。而在幀同步、采樣頻率同步和載波同步這3種同步中,幀同步,即符號同步最為重要。因為一旦符號同步不準確,其他兩種同步以及信道估計將無從談起。
基于導頻符號,也稱訓練符號的幀同步一直是OFDM技術研究的熱點,目前為止有很多關于這方面的研究文獻[5-11]。其中,最流行的 S&C 算法[6]是通過對訓練符號的兩個相同部分的相關峰值的搜索來完成符號定時,該算法雖然復雜度較低,但定時度量出現平頂,造成嚴重的定時模糊。Minn[7]則通過對包括4段重復部分的訓練符號兩兩求相關,雖然該方法的定時度量產生了較為尖銳的峰值,但同時也出現了一些旁瓣,而且在衰落信道中定時度量峰值變得不再明顯。對此,Park[8]提出增大相鄰定時度量間的差別來降低符號定時的不確定性,但該算法在低信噪比或多徑衰落的信道環境下,定時度量會出現子峰,造成符號定時困難。Ren[9]通過對PN序列加權后的訓練符號進行相關運算來進行符號定時,該算法雖然通過加權以實現加擾從而增大定時度量相鄰值的區別,但同時也降低了相關項的相似度,所以同樣也會面臨Park算法遇到的問題。Filippi[10]通過在時域利用頻域導頻,在完成DFT之前獲得粗信道估計并以此來定位DFT窗,即OFDM符號的起始位置。Ruan[11]提出構建一系列組件定時度量,訓練符號中每對高度相關的重復段對應一個定時度量組件,然后將其進行線性組合,通過在正確的檢測性能條件下使錯誤報警概率最小來進行符號定時。以上2種算法從定時準確度和算法復雜度上都不及Park算法。
本文基于IEEE 802.16d下行鏈路的幀結構對現存的幀同步算法進行了改進,先通過粗同步來確定OFDM符號可能的起始位置,然后利用細同步再找到準確位置。除此之外,為了便于WiMAX,即IEEE802.16d/e,兩種標準下的信道均衡、同步算法的研究與應用,文中還對WiMAX物理層的端對端系統進行了Simulink建模。
1 IEEE802.16d物理層端對端系統建模
1.1 下行鏈路導頻符號幀結構
IEEE802.16d協議定義了2個導頻符號,一個是長導頻符號[2],另一個是短導頻符號。在下行鏈路物理層協議數據單元(PDU)中的導頻符號由2個連續的OFDM符號組成。導頻符號的結構被用于OFDM幀同步,長導頻符號的時域結構如圖1所示。循環前綴(CP)的長度為Ng,OFDM符號的長度為T。第1個OFDM符號只使用序號是4的整數倍的子載波。所以第1個OFDM符號的時域波形由4個重復的包含64個樣值的段落組成,如[N/4 N/4 N/4 N/4],前面加有一個前綴 CP。第2個OFDM符號只用偶數子載波,結果產生的時域結構由2個重復的包含128個樣值的段落組成,如[N/2 N/2],前面也加有一個前綴CP。

圖1 IEEE802.16d長導頻符號結構
1.2 IEEE802.16d物理層模型
WiMAX物理層研究非常重要,但根據WiMAX標準[12]所規定的有限測試向量來對系統進行測試和研究很不方便,對此,本文利用Matlab中的動態系統仿真工具Simulink按照IEEE802.16d物理層標準構建了一個完整的端對端系統模型[13-14],如圖2所示。系統發射機主要實現對原始數據的加擾,信道編碼、交織、子數據符號映射和OFDM符號的形成,這里加擾解擾、RS編解碼、交織和解交織以及OFDM發射與接收都采用子系統的方式實現,如圖3所示。由于發端功能與收端相反,建模基本一致,這里不再贅述。
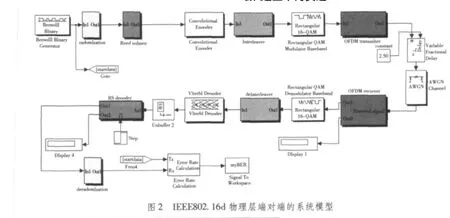
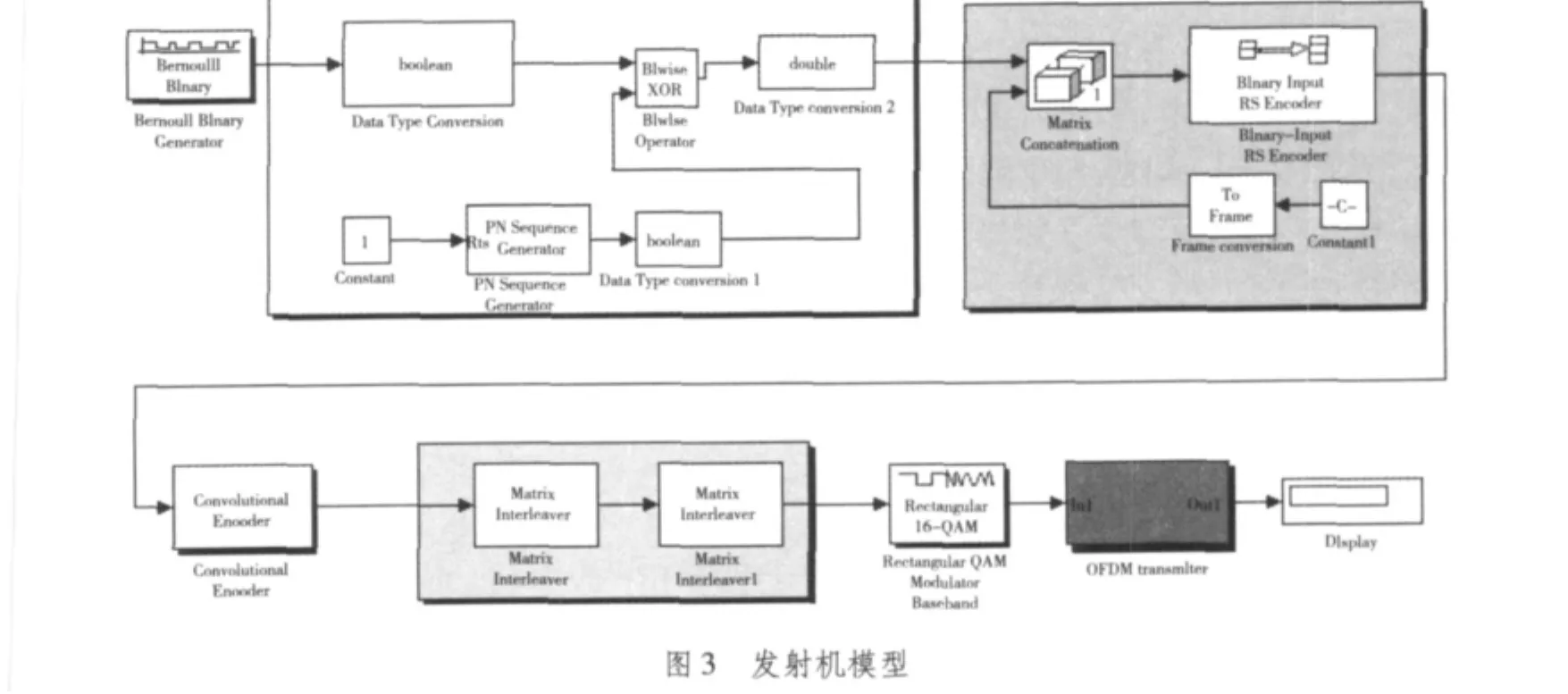
圖4為OFDM符號形成的子系統模型圖,主要是通過矩陣連接模塊Matrix Concatenate和IFFT模塊將子信道上的導頻符號與數據符號連接在一起形成信道里傳輸的PDU單元。具體的講,子系統中第1個N/4長的PN序列通過IFFT變換,產生長導頻符中的第1個OFDM符號的一個副本。同理,由第2個N/2長的PN序列生成長導頻符號的第2個OFDM符號的一個副本。然后,按照IEEE802.16d下行鏈路幀結構,把上述2個副本分別復制4次和2次來生成長導頻符號中的第1個和第2個OFDM符號。最后,模塊Matrix Concatenate將長導頻符號與數據連接起來構成PDU單元。圖5為OFDM接收子系統內部結構圖,為了在Simulink模型中便于算法的調試與實現,這里通過嵌入式Matlab function模塊將符號同步算法嵌入到端對端系統中。由于本文只研究同步參數的捕獲,而不涉及同步參數的跟蹤,故模型未涉及閉環結構。


2 幀同步算法
雖然Park算法通過降低訓練符號副本的相關性來產生脈沖型定時度量曲線,但在低信噪比或多徑衰落信道環境下,這種訓練符號前后兩部分的相關性會急劇惡化,定時度量值會產生較大的子峰值,甚至可能會超過主峰值。而S&C雖然有定時平頂,但在惡劣的信道條件下,訓練符號的前后兩個副本的相關性較Park算法穩定,因而此時的估計性能卻好于Park算法。通過以上的分析,新算法充分利用IEEE 802.16d下行鏈路的幀結構特點,通過粗同步和細同步來完成符號定時。在粗同步過程中通過用長導頻符號中的第1個OFDM符號與收端穩定的已知訓練序列進行互相關來確定OFDM的可能起始位置。隨后在細同步過程中,將S&C算法應用于長導頻符號的第2個OFDM符號,進一步確定OFDM符號的真正起點。這樣S&C算法所具有的相關穩定性就可確保提出的幀同步算法在惡劣信道條件下的準確性。該幀同步算法為
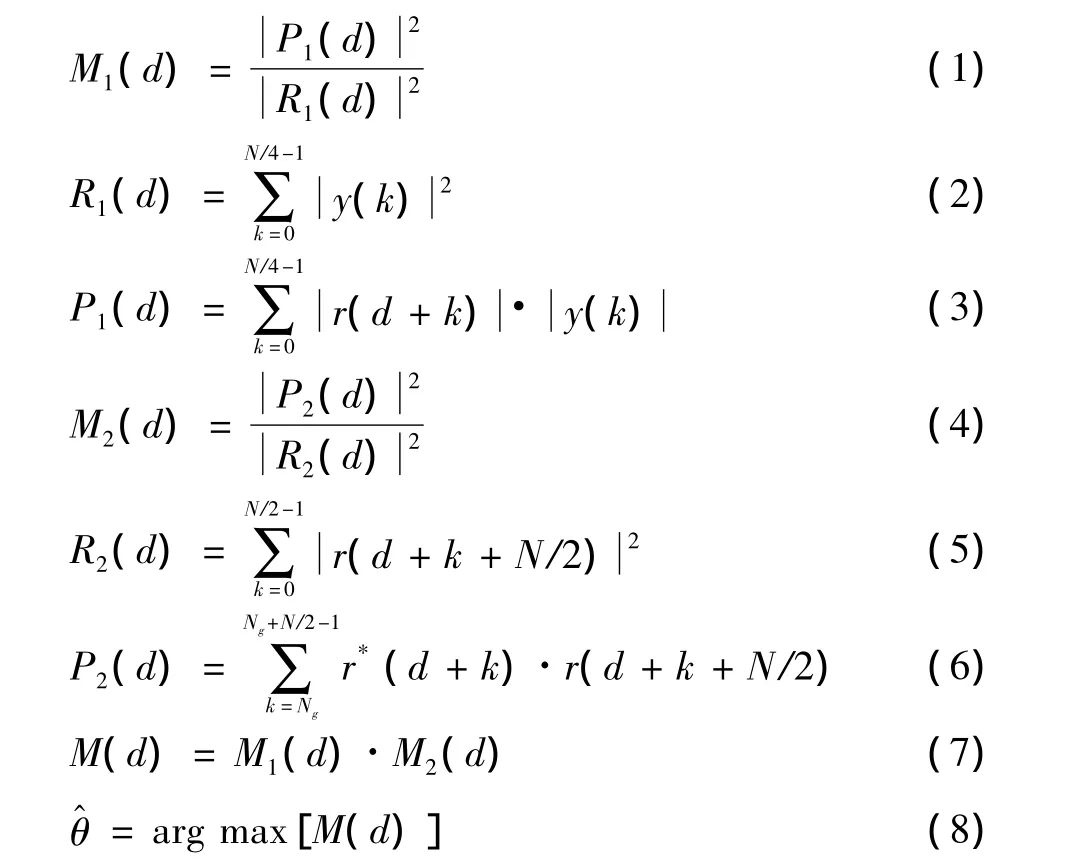
式中:d是相關窗中的第1個樣值對應的時間序號,即假設的FFT窗的起始位置。觀察窗口長為N,N/4是長導頻符號中第1個OFDM符號的相關窗的長度,第2個OFDM符號的相關窗的長度則為N/2。r(k)為接收到的信號;y(k)代表收端已知的訓練序列;M1(d),M2(d)分別是長導頻符號中的第1個和第2個OFDM符號相關運算的歸一化值,即粗同步與細同步各自對應的的定時度量。
在長為N/4的相關窗口內,由于長導頻符號中的第1個OFDM符號具有4段重復部分,隨著相關窗口的移動,即d的取值的改變,位于每個重復段的開頭都會產生1個峰值,最終P1(d)將出現4個峰值,這意味著OFDM符號起始位置的可能位置。為了進一步確定準確位置,對長導頻符號中的第1個OFDM符號的前后2部分求相關,即P2(d),來縮小OFDM符號起始位置可能出現的位置。這里不再采用S&C算法,而是對其進行了改進,如P2(d)。通過采用重疊相關窗,同時提前相關運算的起點,從而產生較之S&C算法更為尖銳的定時度量脈沖,進一步縮小符號定時的范圍。最后將2次相關產生的定時度量相乘,即M(d),處于M2(d)峰值范圍內的M1(d)尖峰被保留下來。由于M2(d)峰值范圍只位于OFDM符號起始位置的左右,所以M1(d)中只有位于第1段重復部分開頭的尖峰被保留了下來,而該處正是真正的OFDM符號起始位置,故當M(d)達到最大值時所對應的d便是符號定時的準確估計值θ^。
3 幀同步算法仿真分析
該幀同步算法的性能通過完整的端對端系統模型來分析,該模型由Matlab中的動態系統仿真工具Simulink來實現,其中仿真參數完全按照IEEE802.16d物理層標準設置。2種情況被考慮,分別是沒有噪聲干擾和有多徑衰落干擾。圖6顯示了在2種情況下,3種符號同步算法的定時度量比較。
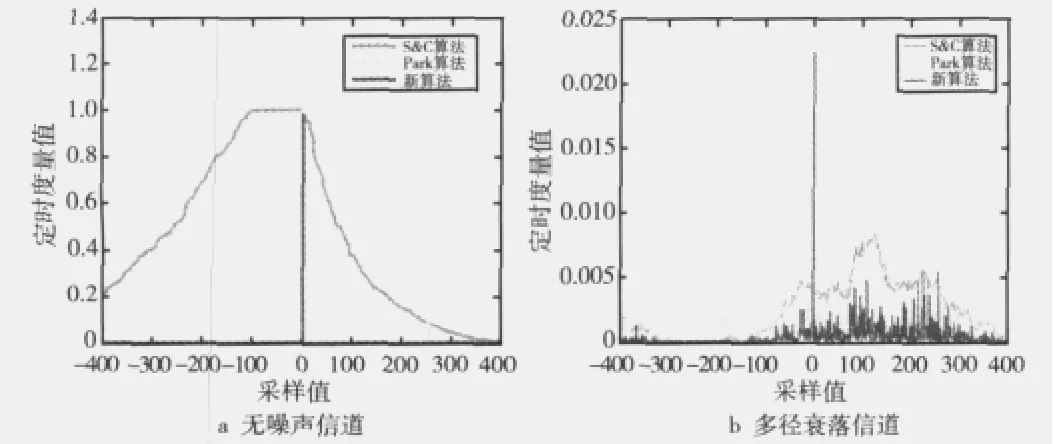
圖6 兩種信道條件下定時度量比較
圖6a給出了在無噪聲干擾時(或較高SNR)3種符號同步算法的定時度量比較。可以看出,新算法和Park算法在準確的OFDM符號起始位置處都出現了像沖激一樣的尖峰,但新算法沒有像Park算法那樣在主峰兩側出現次峰,這表明提出的算法可以實現比Park算法更準確的定時估計。
圖6b是3種符號同步算法在多徑衰落信道環境(或較低SNR)下定時度量比較。可以看出,S&C算法的定時平頂已不存在。Park算法雖然有尖峰,但位于正確OFDM符號定時位置處的尖峰已被許多次峰淹沒,并且S&C算法和Park算法的定時度量曲線幾乎都變成了噪聲。相比之下,新算法雖然也出現一些次峰,但正確OFDM符號起始位置處的峰值卻很突出,這說明提出的幀同步算法較之其他兩種經典算法而言,對多徑衰落環境有更好的適應性。
4 結論
為了便于對WiMAX物理層進行研究,文中首先按照IEEE802.16d標準利用Simulink搭建一個完整的端對端系統模型。隨后基于IEEE 802.16d下行鏈路幀結構,對S&C算法進行了改進,通過先粗同步再細同步的方式來完成對FFT窗的起始位置的估計。仿真結果表明,新算法避免了S&C算法的定時平頂,并且在惡劣信道條件下算法的定時度量仍能保持脈沖型峰值,從而克服了Park算法定時不準確的問題。
[1]Mobile WiMAX-Part I:A technical overview and performance evaluation[S].2006.
[2]IEEE.Standard 802.16—2004 Part16:Air interface for fixed broadband wireless access systems[S].2004.
[3]POLLET T,VAN BLADEL M,MOENECLAEY M.BER sensitivity of OFDM systems to carrier frequency offset and Weiner phase noise[J].IEEE Transactions on Communications,1995,43(1):191-193.
[4]MOOSE P.A technique for orthogonal frequency division multiplexing frequency offset correction[J].IEEE Transactions on Communications,1994,42(10):2908-2914.
[5]VAN DE BEEK J,SANDELL M,BORJESSON P.ML estimation of time and frequency offset in OFDM systems[J].IEEE Transactions on Signal Processing,1997,45(7):1800-1805.
[6]SCHMIDL T M,COX D.Robust frequency and timing synchronization for OFDM[J].IEEE Transaction on Communication,1997,45(12):1613-1621.
[7]MINN H,ZENG M,BHARGAVA V.On timing offset estimation for ofdm systems[J].IEEE Communications Letters,2000,4(7):242-244.
[8]BYUNGJOON P,HYUNSOO C,CHANGEON K,et al.A novel timing estimation method for OFDM systems[J].IEEE Communications Letters,2003,7(5):239-241.
[9]REN G,CHANG Y,ZHANG H.Synchronization method based on a new constant envelop preamble for OFDM systems[J].IEEE Transactions on Broadcasting,2005,51(1):139-143.
[10]FILIPPI A,SERBETLI S.OFDM symbol synchronization using frequency domain pilots in time domain[J].IEEE Transactions on Wireless Communication,2009,8(6):3240-3248.
[11]RUAN M,REED M,SHI Z.Tranining symbol based coarse timing synchronization in OFDM systems[J].IEEE Transactions on Wireless Communication,2009,8(5):2558-2569.
[12]Mathworks Corporation.From a wireless standards document to an executable modelusing Matlab and simulink[EB/OL].[2005-06-14].http://www.mathwork.com.
[13]ABDEL ALIM O,ELBOGHDADLY N,ASHOUR M,et al.Channel estimation and equalization for fixed/mobile OFDM WiMAX system in Simulink[C]//Proc.1st International Conference on MOBILe Wireless MiddleWARE,Operating Systems,and Applications.Innsbruck:Mobilware,2008.
[14]牛堃,陳恩慶,楊守義.OFDM系統符合同步的FPGA設計與實現[J]. 電視技術,2010,34(9):47-49.
猜你喜歡
ELLE世界時裝之苑(2024年5期)2024-05-14 16:00:39
中學生數理化·七年級數學人教版(2021年10期)2021-11-22 07:53:00
幼兒園(2021年6期)2021-07-28 07:42:14
小學生學習指導(低年級)(2019年11期)2019-11-25 07:31:48
散文詩(2017年17期)2018-01-31 02:34:20
小學生學習指導(低年級)(2018年3期)2018-01-31 02:19:05
小學生導刊(2017年13期)2017-06-15 20:29:38
哈爾濱師范大學自然科學學報(2015年1期)2015-04-19 06:55:26
天津科技大學學報(2015年4期)2015-04-16 04:55:11
科普童話·百科探秘(2014年5期)2015-03-09 09:07:41