壓力容器模擬培訓(xùn)監(jiān)控系統(tǒng)設(shè)計
2012-06-12 02:25:06許銀萍周永念
武漢工程大學(xué)學(xué)報 2012年8期
楊 紅 ,許銀萍,周永念,楊 帆
(1.武漢工程大學(xué)機電工程學(xué)院,湖北 武漢 430205; 2.武漢市壓力容器壓力管道安全技術(shù)研究中心,湖北 武漢 430205; 3. 武漢市鍋爐壓力容器檢驗研究所,湖北 武漢 430013)
0 引 言
壓力容器廣泛應(yīng)用于化工、煉油、機械、動力、輕工、紡織、冶金、核能以及運輸?shù)裙I(yè)部門,是生產(chǎn)過程中必不可少的重要設(shè)備.壓力容器安全管理人員和操作人員培訓(xùn)是一個集壓力容器基礎(chǔ)知識、專業(yè)知識、安全管理和安全操作知識、法規(guī)知識等綜合性非常強的專業(yè)職能技術(shù)培訓(xùn)[1].考試培訓(xùn)機構(gòu)需要根據(jù)大綱要求內(nèi)容,結(jié)合實際情況制定具體的培訓(xùn)考核細則.目前國內(nèi)在壓力容器培訓(xùn)考核工作中還沒有相關(guān)的專用培訓(xùn)考核設(shè)備,培訓(xùn)考核主要靠講義、課堂教學(xué)、考試等傳統(tǒng)方式完成,不能完全滿足壓力容器種類多,行業(yè)覆蓋面廣,培訓(xùn)質(zhì)量要求高的要求.
仿真技術(shù)綜合了當(dāng)代科學(xué)技術(shù)中多種現(xiàn)代化尖端手段,極大地擴展了人類的視野、時限和能力,在科學(xué)技術(shù)領(lǐng)域起到了極其重要的作用[2].近10年來,我國仿真技術(shù)得到迅速發(fā)展.從應(yīng)用的廣泛程度看,已經(jīng)從早期的航空、航天、火力發(fā)電和核動力發(fā)電部門擴展到今天的軍事、電子、通信、交通、艦船、冶金、建筑、氣象、地質(zhì)、機械制造、輕工、技術(shù)訓(xùn)練等多種行業(yè)和部門,其應(yīng)用已滲透到系統(tǒng)生命周期的全過程.
半實物仿真作為仿真技術(shù)的一個分支,涉及的領(lǐng)域極廣,包括機電技術(shù)、液壓技術(shù)、控制技術(shù)、接口技術(shù)等.從某種角度上講,一個國家的半實物仿真技術(shù)的發(fā)展水平也代表其整體的科技實力.半實物仿真是工程領(lǐng)域內(nèi)一種應(yīng)用較為廣泛的仿真技術(shù),是計算機仿真回路中接入一些實物進行的試驗,因而更接近實際情況[3].這種仿真試驗將對象實體的動態(tài)特性通過建立數(shù)學(xué)模型、編程,在計算機上運行,這是在飛機與導(dǎo)彈控制和制導(dǎo)系統(tǒng)中必須進行的仿真試驗.
實時監(jiān)控[4]系統(tǒng)以其直觀、方便、信息內(nèi)容豐富而被廣泛應(yīng)用于金融系統(tǒng)、交通系統(tǒng)、公安系統(tǒng)、教育系統(tǒng)和醫(yī)療系統(tǒng)等眾多領(lǐng)域, 在計算機技術(shù)、電子技術(shù)和通信技術(shù)迅猛發(fā)展的過程中, 監(jiān)控系統(tǒng)的技術(shù)水平也從初期的模擬信息傳輸與控制飛速發(fā)展到了數(shù)字化、網(wǎng)絡(luò)化信息傳輸與控制.
1 系統(tǒng)實施方案
考核培訓(xùn)系統(tǒng)的控制系統(tǒng)體系結(jié)構(gòu)如圖1所示.系統(tǒng)基于先進的以太網(wǎng)自動化技術(shù)所提供的現(xiàn)場設(shè)備開放網(wǎng)絡(luò)平臺,以網(wǎng)絡(luò)可編程控制器構(gòu)建下位機單元,實現(xiàn)現(xiàn)場設(shè)備控制,以工控組態(tài)軟件和通用PC為軟、硬件平臺構(gòu)建上位機系統(tǒng),提供圖文界面環(huán)境;系統(tǒng)基于通用的以太網(wǎng)平臺,實現(xiàn)上、下位機間的通信,構(gòu)建一個上位機對應(yīng)多個下位機的結(jié)構(gòu),以方便系統(tǒng)擴展[5-6].
下位機操作站選用“大工計控”公司的PEC 8000和DIO 2000 網(wǎng)絡(luò)可編程控制器.PEC8000是基于工業(yè)以太網(wǎng)的網(wǎng)絡(luò)化可編程控制器,有1路10 MB/100 MB工業(yè)以太網(wǎng)通信接口,2路RS485通信接口,支持MB+高速總線,8路數(shù)字量輸入(支持4路最高50 kHz高速輸入),8路數(shù)字量輸出(支持2路最高頻率50 kHz高速輸出),6路模擬量輸入,2路模擬量輸出.DIO2000是基于RS485串行通信的網(wǎng)絡(luò)化可編程控制器,有1路RS485通信接口,23路數(shù)字量輸入,16路數(shù)字量輸出.下位機通過現(xiàn)場檢測和執(zhí)行裝置,按照預(yù)先編制的控制程序?qū)崿F(xiàn)對模擬裝置操作狀態(tài)的監(jiān)測和控制.
上位機選用北京昆侖通態(tài)自動化軟件科技有限公司開發(fā)的MCGS工控組態(tài)軟件進行軟、硬件組態(tài),通過采集和監(jiān)控下位機上傳的實時數(shù)據(jù),提供模擬操作監(jiān)控流程,實現(xiàn)操作可視化,實現(xiàn)操作提示和培訓(xùn)考核功能.上位機與PLC之間通過以太網(wǎng)進行通信.以PEC 8000為主控制器,DIO 2000為數(shù)字量擴展模塊,通過RS-485串行線路連接通信.
采用昆侖通態(tài)的觸摸屏TPC1062K作為現(xiàn)場操作終端,方便學(xué)生完成壓力容器外觀檢查操作,觸摸屏與PEC 8000通過RS-485串行模式進行通信.
2 系統(tǒng)實現(xiàn)關(guān)鍵技術(shù)
2.1 系統(tǒng)通信實現(xiàn)
在編程環(huán)境PLC-Config中獲取PEC8000上的IP地址192.168.1.181,將PC機上的IP地址設(shè)置成同一網(wǎng)段192.168.1.X ,上位機與PLC就能進行通訊.PEC8000與MCGS觸摸屏之間的通訊,采用RS485接線方式,7號口接主控制器PEC8000上的T1+,8號口接T1-.在MCGS組態(tài)軟件的設(shè)備窗口中選擇“通用串口父設(shè)備” ,“莫迪康ModbusRTU子設(shè)備”,并配置各自的設(shè)備屬性.PEC8000與MCGS監(jiān)控界面的通訊,通過以太網(wǎng)進行連接.在MCGS的設(shè)備窗口里選擇“通用TCP/IP父設(shè)備”,“莫迪康MODBUS-TCP子設(shè)備”,按表1和表2進行相應(yīng)的屬性設(shè)置.
單個PEC8000與DIO2000總共有31路開關(guān)量輸入,20路開關(guān)量輸出,蒸壓釜系統(tǒng)需要12路開關(guān)量輸入,21路開關(guān)量輸出,其中觸摸屏占用14路輸出.現(xiàn)場調(diào)試時,發(fā)現(xiàn)觸摸屏上開關(guān)量輸出不占用PLC上的實際端口,所以可直接使用PLC上的內(nèi)部虛擬端口,節(jié)約出很多實際輸出端口.
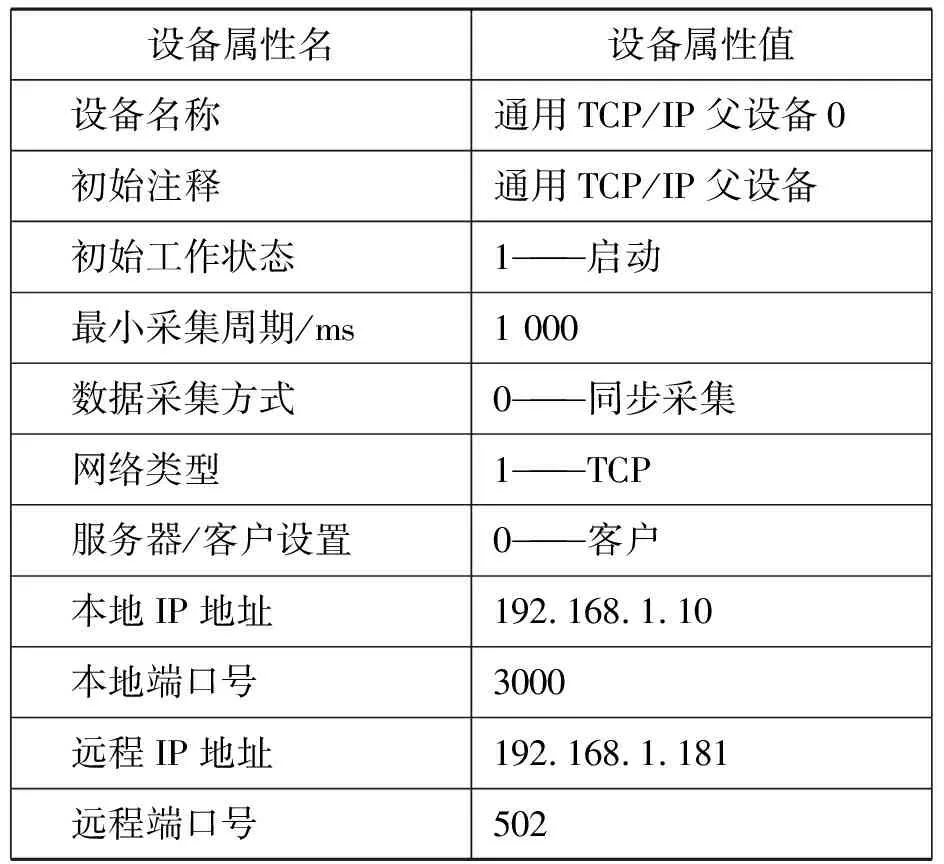
表1 主設(shè)備參數(shù)設(shè)置Table 1 Setting of the master equipment parameters
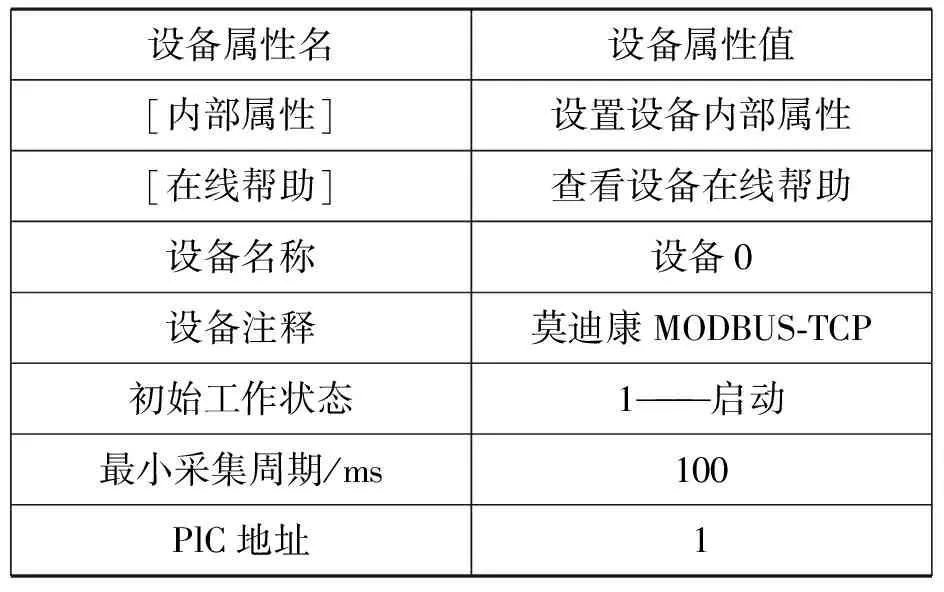
表2 次設(shè)備參數(shù)設(shè)置Table 2 Setting of the secondary equipment parameters
2.2 系統(tǒng)動畫流程設(shè)計
MCGS組態(tài)環(huán)境中,沒有動畫插入功能.使用3Dmax作出蒸壓釜操作培訓(xùn)從開門到關(guān)門的五張狀態(tài)圖,每個動作會出現(xiàn)相應(yīng)的圖片.這樣做出來的動畫效果很差,每張圖片切換時波動大,不能客觀、真實地顯示蒸壓釜的操作流程,而且使用3Dmax制作動畫,其過程復(fù)雜,工作量大.
使用相機直接拍攝現(xiàn)場模擬樣機.用三腳架固定住相機,從側(cè)面和正面分別拍攝蒸發(fā)釜的動作過程(為了使效果更加明顯,盡可能的多拍一些照片).拍出的照片運用Photoshop進行處理,裁減掉不需要的東西.最后將每張照片以位圖的形式插入MCGS中,并進行設(shè)置.這里要注意一點,相機拍出的圖片像素很高,占用空間大,如果直接貼到MCGS中,會導(dǎo)致系統(tǒng)反應(yīng)慢,甚至出現(xiàn)癱瘓這種情況,所以在插入圖片之前要用Photoshop將照片的像素改小.
最終的蒸壓釜流程效果圖如圖2所示.
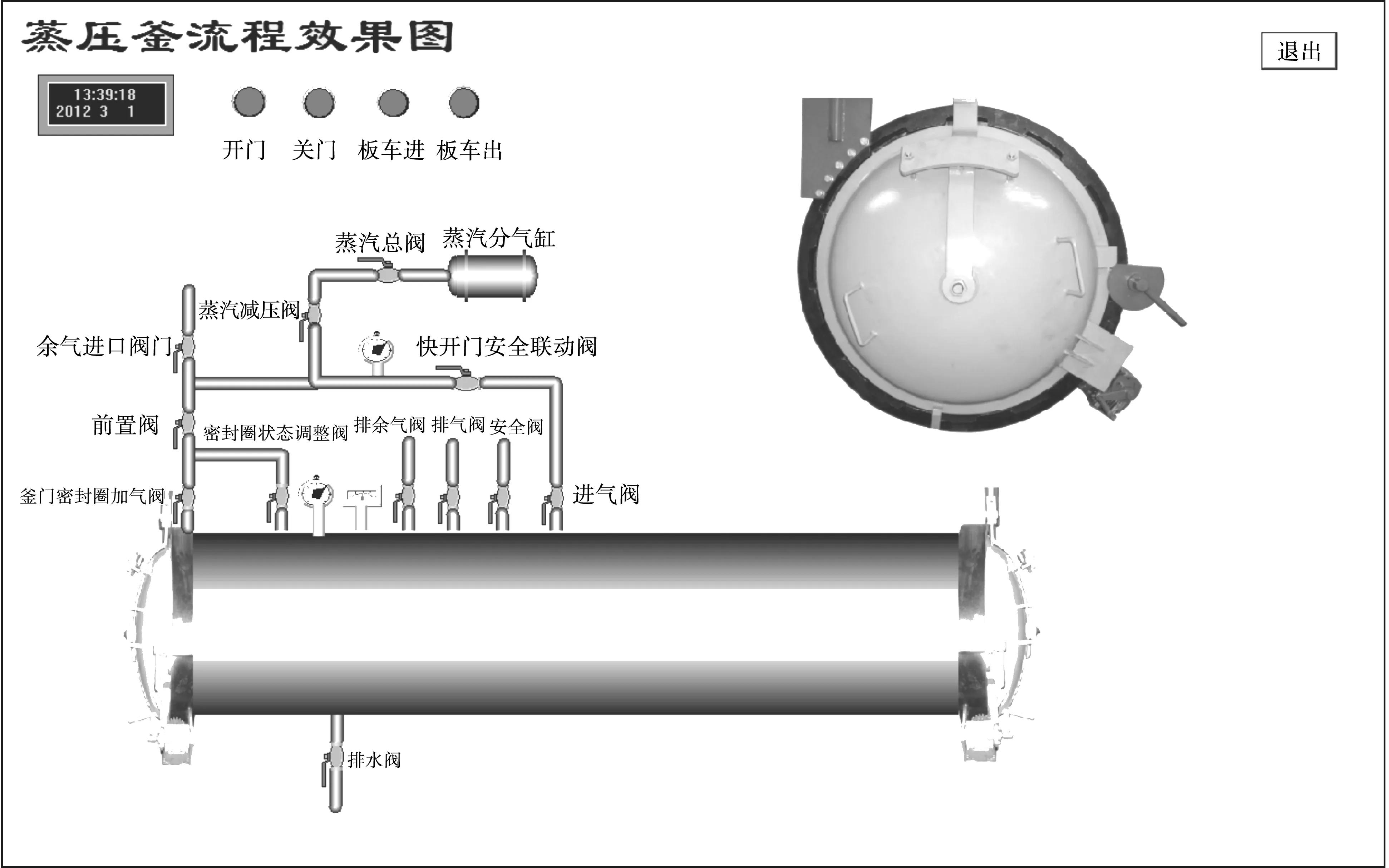
圖2 蒸壓釜流程圖Fig.2 The figure of the autoclave process
2.3 數(shù)據(jù)庫系統(tǒng)實現(xiàn)
系統(tǒng)采用數(shù)據(jù)庫[7]訪問方式,通過MCGS各種數(shù)據(jù)屬性的設(shè)置和構(gòu)件的操作,實現(xiàn)監(jiān)控系統(tǒng)與數(shù)據(jù)庫的數(shù)據(jù)處理和交換功能.整個蒸壓釜數(shù)據(jù)庫系統(tǒng)包括試題信息庫,學(xué)員信息庫.在Microsoft Access數(shù)據(jù)庫中分別對兩類數(shù)據(jù)庫進行編輯,試題信息庫需要錄入試題名稱、試題操作步驟、試題初始條件,學(xué)院信息庫中包括新學(xué)員信息錄入和管理.MCGS不在ODBC數(shù)據(jù)源管理器中指定ODBC數(shù)據(jù)源,而是直接在MCGS組態(tài)軟件中,指定使用的ODBC驅(qū)動程序和ODBC數(shù)據(jù)庫服務(wù)器,從而由MCGS直接建立起ODBC數(shù)據(jù)庫連接,這種方式可以使工程應(yīng)用時需要考慮的復(fù)雜性降低.
3 系統(tǒng)主要功能
該系統(tǒng)將計算機仿真與壓力容器操作系統(tǒng)樣機相結(jié)合,逼真地模擬出壓力容器的實際操作環(huán)境,自動記錄和回放系統(tǒng)操作過程參數(shù),設(shè)置設(shè)備常見故障,自動對學(xué)員的操作能力進行考核與評價,滿足壓力容器實際操作技能培訓(xùn)和考核的各項要求,實現(xiàn)了典型工藝設(shè)備流程動畫的輔助教學(xué),全面提高了培訓(xùn)考核的管理質(zhì)量.
4 結(jié) 語
系統(tǒng)采用上下位機的架構(gòu),充分利用上位機處理信息能力超強和下位機穩(wěn)定可靠的特點,非常適合工業(yè)現(xiàn)場.同時基于通用的以太網(wǎng)平臺,實現(xiàn)上、下位機間的通信,構(gòu)建了一個上位機對應(yīng)多個下位機的結(jié)構(gòu),方便系統(tǒng)擴展.在MCGS中利用Access數(shù)據(jù)庫保存數(shù)據(jù)和處理數(shù)據(jù), 提高了系統(tǒng)的可靠性和運行效率, 同時也使其它應(yīng)用軟件系統(tǒng)能直接處理數(shù)據(jù)庫中的存盤數(shù)據(jù).
參考文獻:
[1] 張洪,何世先.如何做好壓力容器操作人員的安全技術(shù)培訓(xùn)[J]. 滬天化科技,2011(2):160-161.
[2] 石曉瑛,許智榜. 基于GUI的SVPWM矢量控制系統(tǒng)仿真[J]. 武漢理工大學(xué)學(xué)報, 2011, 33 (2) :128-132 .
[3] 王江,林蔚.激光半主動制導(dǎo)武器半實物仿真系統(tǒng)能量鏈研究[J]. 紅外與激光工程,2011,40(7):1230-1233.
[4] 劉建甫,駱瑞松.煤礦井下供電實時監(jiān)測監(jiān)控系統(tǒng)在某礦的應(yīng)用[J]. 工礦自動化,2011,8(8):175-178.
[5] 楊紅,付帥.虛擬現(xiàn)實環(huán)境下的工控界面構(gòu)件封裝[J].武漢工程大學(xué)學(xué)報,2012,34(1):48-52.
[6] 劉新宇,徐海潮,初秀民,等.道路照明智能控制系統(tǒng)的設(shè)計與實現(xiàn)[J]. 武漢理工大學(xué)學(xué)報,2011,33 (10) :69-72.
[7] 黃會明, 黃益賓.芬太尼類反恐活性化合物數(shù)據(jù)庫的研制[J]. 武漢工程大學(xué)學(xué)報,2010,32(7):31-32.
猜你喜歡
辦公室業(yè)務(wù)(2020年18期)2020-09-29 12:15:58
童話世界(2020年10期)2020-06-15 11:53:22
勞動保護(2019年7期)2019-08-27 00:41:26
財經(jīng)(2017年2期)2017-03-10 14:35:35
中國衛(wèi)生(2016年2期)2016-11-12 13:22:24
財經(jīng)(2016年15期)2016-06-03 07:38:02
財經(jīng)(2016年3期)2016-03-07 07:44:46
財經(jīng)(2016年6期)2016-02-24 07:41:51
海峽姐妹(2014年5期)2014-02-27 15:09:32
中國外資·下半月(2012年9期)2012-12-31 00:00:00