電動汽車新型無級變速器的特性分析及仿真
2012-06-06 09:45:00張石靜許南紹
重慶郵電大學學報(自然科學版) 2012年1期
關鍵詞:分析
李 鑫,張石靜,許南紹
(1.重慶理工大學汽車零部件制造及檢測技術教育部重點實驗室,重慶400054;2.重慶理工大學重慶汽車學院,重慶 400054)
0 引言
面對資源和環境這兩大問題,發展節能環保汽車已是汽車工業的趨勢,電動汽車就是在這樣的背景下發展起來的。它不僅行駛時無排放,而且其能量來源于電能,屬于二次能源,具有來源廣泛的特點。
雖然電動汽車的動力源是電機,但是,以目前電機和電池的技術水平,電動汽車還必須配備變速器,才能滿足汽車在不同工況下的行駛需求。
當前,世界各大汽車廠商都在大力開展無級變速器的研發工作。奧迪、福特、本田、日產等著名汽車品牌,都有配備無級變速器(continuously variable transmission,CVT)的轎車在銷售。我國在CVT方面的研究從“九·五”期間就已開始,由吉林工業大學、東北大學、東風汽車公司合作,共同承擔并完成了國家重大科技攻關計劃“轎車金屬帶式無級自動變速器的開發和研制”[1-2]。
本文介紹的是一種差動式行星齒輪式無級變速器(planetary gear continuously variable transmission,P-CVT),相對于傳統的CVT,它具有結構簡單、重量輕、成本低以及控制簡便等優點[3]。P-CVT采用純機電控制方式,徹底摒棄了傳統CVT變速器中的液壓系統,因此,適合搭載于電動汽車平臺。其調速電機的控制采用了先進的數字式脈寬調制(digital pulse-width modulation,DPWM)方式[4],由于模糊控制系統不需要建立控制系統的精確數學模型,可以避免因系統建模誤差帶來的不良影響[5]。因此,PCVT的速比控制策略采用模糊控制算法即可達到預期的控制效果。
1 P-CVT的結構及原理
圖1是P-CVT的結構示意圖,其核心部分是一行星輪系。各零部件的編號及名稱如表1所示。
結合機械原理[6]可以推出

(1)式中:i1H是太陽輪與行星架的速比;kp是行星輪系的特征參數,其值為z3/z1;n1,n3分別是太陽輪及齒圈的轉速。
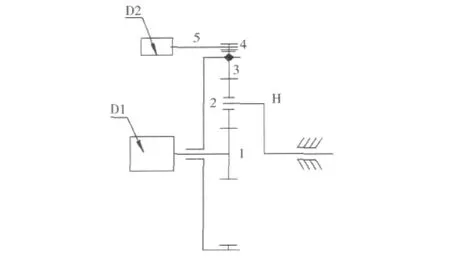
圖1 P-CVT結構示意圖Fig.1 Structure diagram of P-CVT
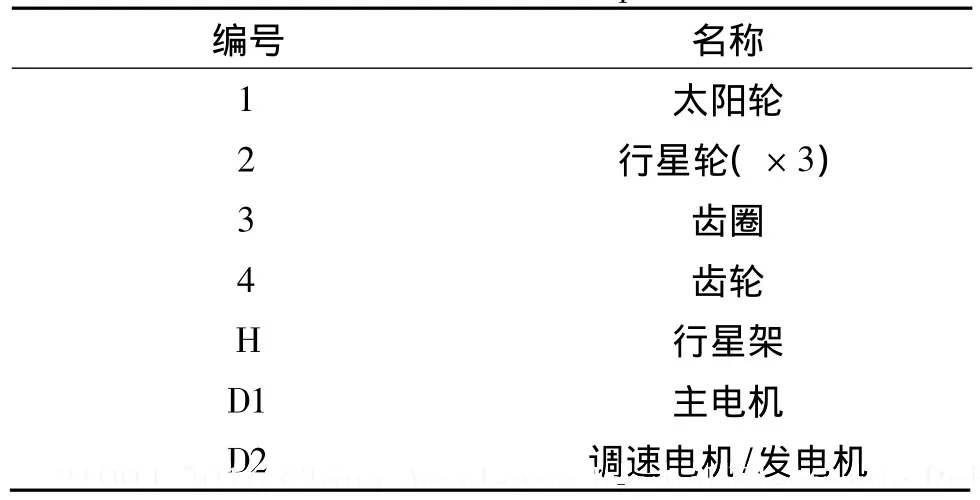
表1 各編號零部件的名稱Tab.1 Name of the parts
從(1)式不難看出,當主電機轉速固定時,可以通過調節調速電機的轉速,實現太陽輪與行星架速比的連續變化,從而達到無級變速的目的。
2 P-CVT基本構件間轉速關系、扭矩關系的理論分析及驗證
本節推導了P-CVT 3個基本構件間(即太陽輪、行星架、齒圈)轉速、扭矩的關系。此外,本文所做的分析工作,是在整個系統處于平衡狀態的前提下進行的。
2.1 轉速關系的推導
根據周轉輪系的傳動比計算方法可以得出(2)式[7]。

(2)式中:iH13是轉化機構中太陽輪和齒圈之間的傳動比;ωH1,ωH3分別為轉化機構中太陽輪和齒圈的角速度;ω1,ω3,ωH分別為太陽輪、齒圈以及行星架的絕對角速度;z1,z3分別為太陽輪和齒圈的齒數。
將(2)式化簡可得

(3)式即為P-CVT 3個基本構件間的轉速關系式,以太陽輪的轉向為正,與其相反為負。
2.2 扭矩關系的推導
下面從力學的角度推導P-CVT 3個基本構件間扭矩的關系。對行星輪進行受力分析[8],如圖2所示。
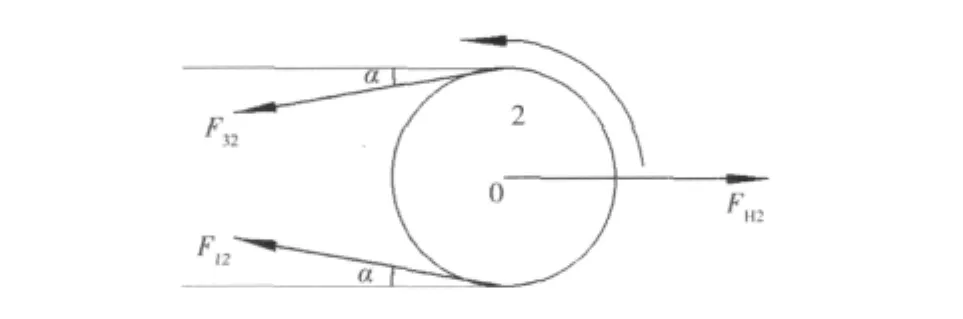
圖2 行星輪受力分析Fig.2 Force analysis of planetary gear
圖2中,O是行星輪2的圓心;FH2,F32,F12分別是行星架、齒圈、太陽輪作用于行星輪2上的力。因為行星輪2是從動輪,所以判斷α是嚙合角,由于行星輪是標準安裝,即α為分度圓壓力角。
整個系統處于平衡狀態,所以有

對太陽輪進行受力分析,如圖3所示。
圖3中,FO1X,FO1Y,F21分別為軸承、行星輪作用于太陽輪上的力;M1為作用于太陽輪的外部扭矩。由于整個系統處于平衡狀態,因此,從受力分析圖可以看出

(5)式中:R1為太陽輪的半徑;M1為作用于太陽輪的外部扭矩。
同理可以推出

(6)式中:R3為齒圈的半徑;M3為作用于齒圈的外部扭矩。
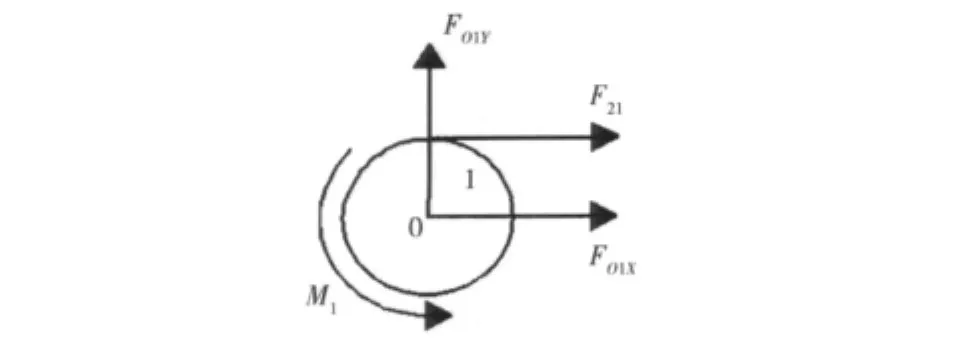
圖3 太陽輪受力分析Fig.3 Force analysis of sun gear
因為F12與F21,F23與F32是兩對作用力與反作用力,其大小相等,方向相反,結合(5)式、(6)式,可以得出

因為整個系統處于平衡狀態,所以有

(8)式中:M1,M3,MH分別為作用于太陽輪、齒圈以及行星架上的外部扭矩矢量,其數值大小分別為M1,M3,MH。
綜合(7)式,(8)式可得

2.3 轉速、扭矩關系的驗證
對整個P-CVT而言,其系統輸入、輸出的功率共有3個,即:太陽輪輸入功率P1,齒圈輸入功率P3,行星架輸出功率PH,根據能量守恒定律[9]可得
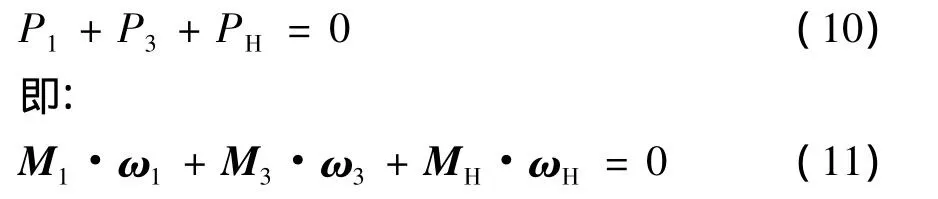
(11)式中,ω1,ω3,ωH分別為太陽輪、齒圈及行星架的絕對角速度矢量,其數值大小分別為ω1,ω3,ωH。
此時,可分以下幾種情況:
1)齒圈不動。即ω3=0,此時,P3=0,則:P1+PH=0,即

將(3)式和(9)式帶入(12)式可得

顯然,(13)式成立。
2)齒圈轉向與太陽輪轉向相同。此時,太陽輪與齒圈同為輸入端,行星架為輸出端,則(10)式可變為
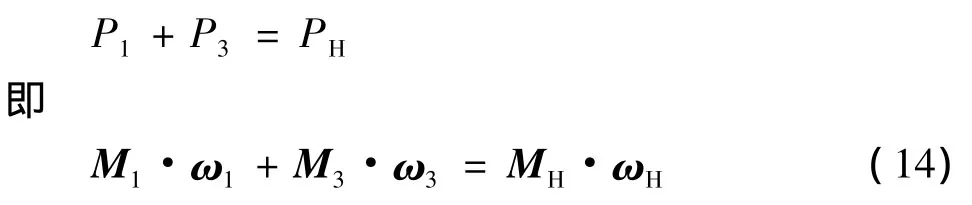
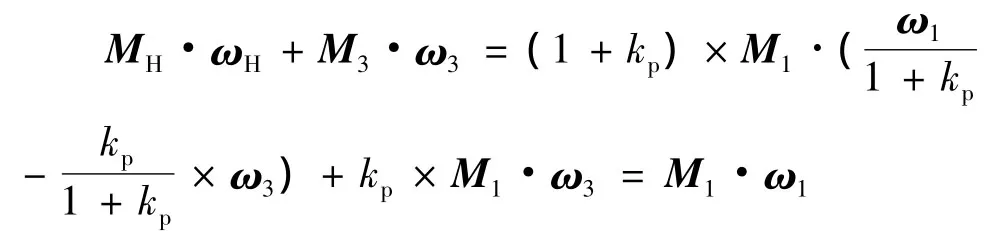
將(3)式和(9)式帶入(14)式的左邊化簡可得

顯然,(14)式成立。

將(3)式和(9)式帶入(15)式的左邊可得
顯然,右邊等于左邊,(15)式成立。
綜上可知,當整個行星輪系處于平衡時,其太陽輪,齒圈以及行星架所受的外部扭矩之間的比例遵循(9)式。
3 ADAMS建模與仿真驗證
ADAMS是由美國MDI公司開發的一款對機械系統進行運動學與動力學仿真計算的軟件,它集建模、計算以及后處理為一體,以計算多體系統動力學為基礎,并包含多個專業模塊。利用它可以建立起復雜機械系統的運動學和動力學模型[10]。
3.1 P-CVT的ADAMS建模
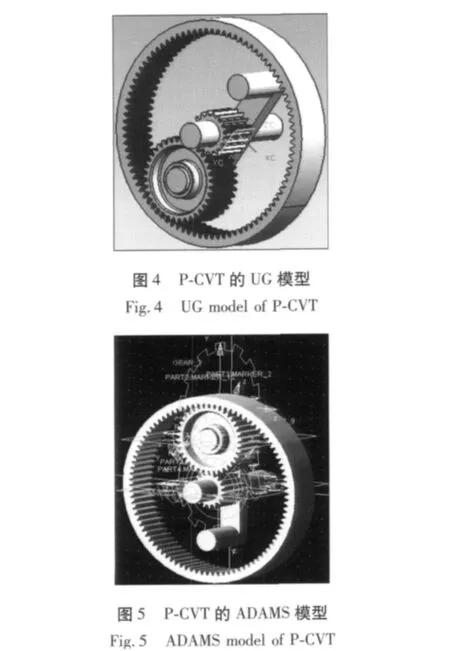
在這一節,我們通過ADAMS工具對具體實例進行動力學仿真,來驗證上述推論。先將在Unigraphics(UG)中裝配好的三維模型(如圖4所示),導出成ADAMS可識別的Parasolid文件,然后導入ADAMS中進行仿真,定義好相關約束后的ADAMS模型如圖5所示。
3.2 仿真
通過第2節的分析和推導可知:(3)式和(9)式中共有 6個參數,即:M1,M3,MH,ω1,ω3,ωH,在這6個參數中,只需任意給定2個角速度以及1個扭矩,即可求出其余2個扭矩以及剩下的1個角速度。(本次仿真已將角速度轉換為轉速,因此給定的參數是轉速)
本次仿真,給定的參數是行星架所受扭矩MH、太陽輪轉速n1、齒圈轉速n3,需要通過仿真確定的參數是太陽輪輸入扭矩M1、齒圈輸入扭矩M3、行星架轉速nH。在仿真過程中,根據表2提供的5組已知參數值,測量相應的其余5組未知參數,再將仿真的結果與理論計算結果進行對比。仿真結果如圖6-10所示。圖6-10中,每一組圖中左邊部分是仿真得到的齒圈轉速nH,右邊部分是仿真得到的太陽輪及齒圈上的扭矩,其中實線是太陽輪上的扭矩,虛線是齒圈上的扭矩。圖標上的數字表示序號,與表2中的序號對應。
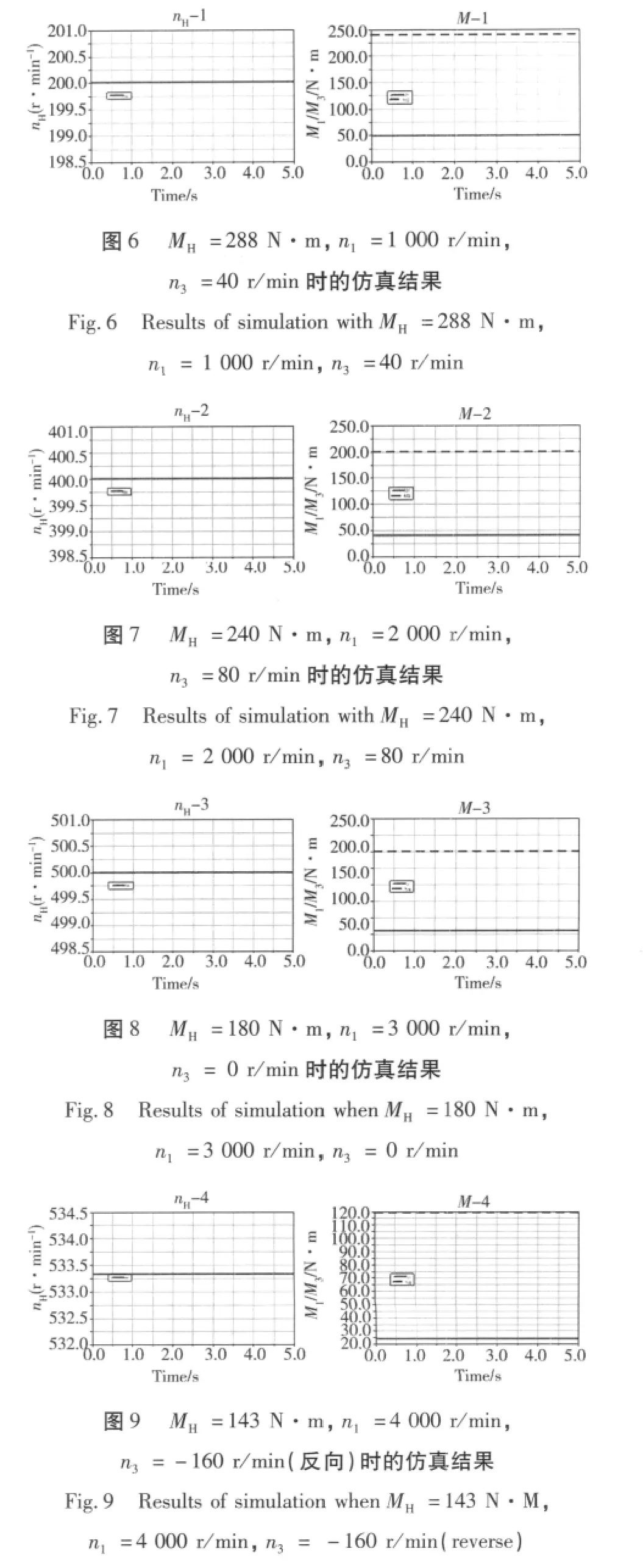
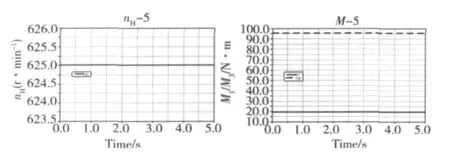
圖10 M H=114 N·m,n1=5 000 r/min,n3=-250 r/min(反向)時的仿真結果Fig.10 Results of simulation when M H=114 N·m,n1=5 000 r/min,n3= -250 r/min(reverse)
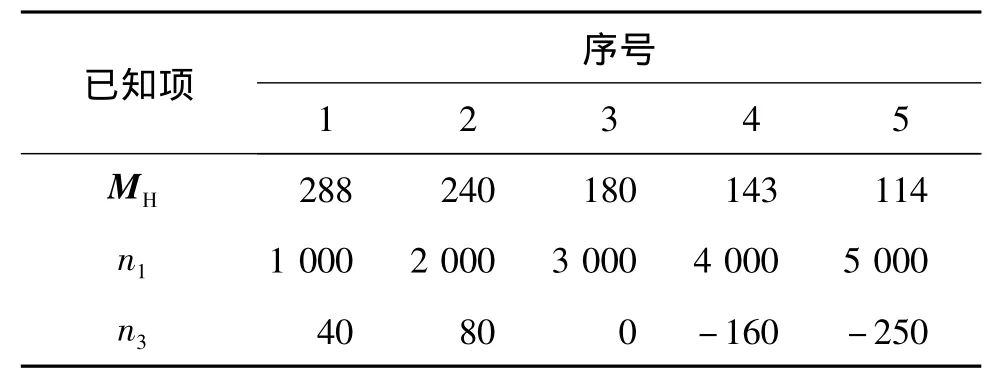
表2 已知數據Tab.2 Known datas
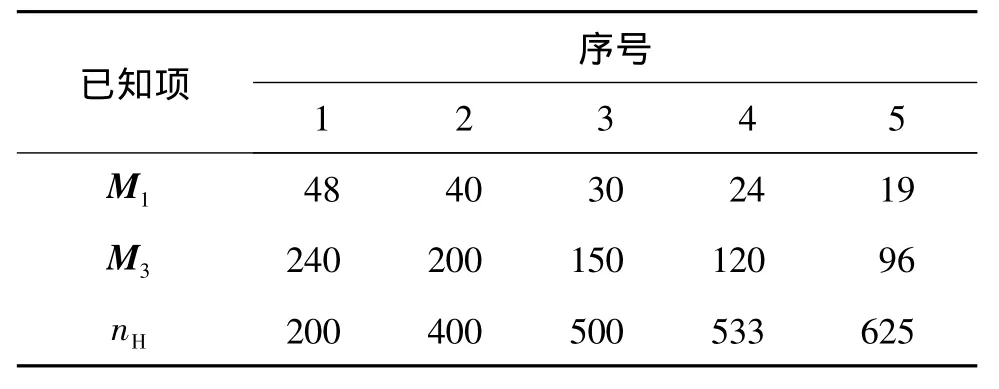
表3 理論計算結果Tab.3 Results of theoretical calculation
3.3 結果分析
通過比較仿真結果與理論計算結果比較(見表4),我們發現,這兩種方式所取得的數據基本一致,雖然其中有2組數據存在一定誤差,但其誤差都不大于3%,在允許的范圍內。
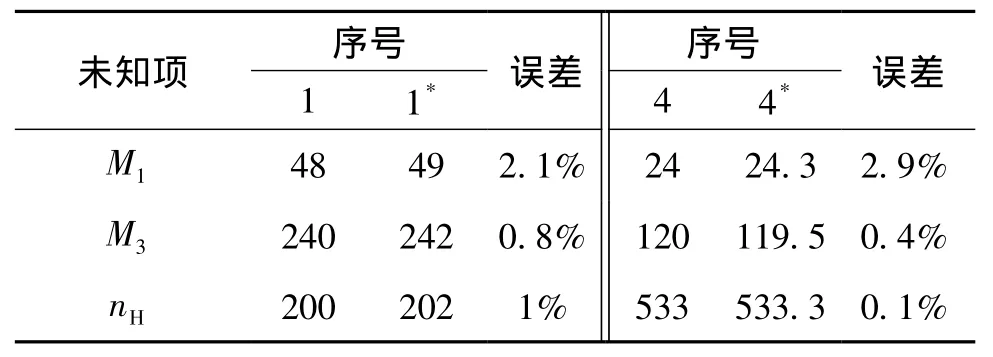
表4 仿真結果與理論計算結果比較Tab.4 Simulation results comqared with theoretical calculation results
表4中,X為計算結果,X*為仿真結果,誤差為(X-X*)/X。分析造成誤差的主要原因是我們在將三維模型從UG中導入到ADAMS中時,齒輪嚙合部位沒能做到精確定位。
4 結論
本文通過理論分析與仿真結合,對差動行星齒輪式無級變速器的輸入、輸出轉速、扭矩間的關系進行了推導和仿真驗證,得出以下結論:
1)本文所研究的變速器,雖然可以達到無級變速的目的,但它僅是速度復合型機構,其輸入、輸出扭矩與速比之間并無直接關系。
2)與傳統汽車變速器的“降速增矩”或“增速降矩”特性不同,本變速器理論上可以實現高速大扭矩輸出,從能量守恒的理論來解釋,就是通過變速器增加的能量均源于齒圈上調速電機的輸出功率。
3)相對發動機而言,本變速器與電機配合使用具有調速范圍廣、輸出扭矩大、高速恒扭矩等特點,可以提高主電機的工作效率,從而達到節能的目標。因此,該變速器可在電動汽車上推廣應用,具有較好的發展前景。
[1] 李春青,彭建中,吳彤峰.國內外汽車無級變速器(CVT)技術的發展概況[J].廣西工學院學報,2004,12(5):19-23.
LIChun-qing,PENG Jian-zhong,WU Tong-feng.General developing situation of continuously variable transmission technology for autos at home and abroad[J].Journal of Guangxi University of Technology ,2004,12(05):19-23.
[2]唐小林,楊為,陸國棟,等.微車變速器箱體的聲振耦合[J].四川兵工學報,2009,30(8):63-64.
TANG Xiao-lin,YANGWei,LU Guo-dong,etal.Vibro-acoustic Coupling of Transmission Tank Body for Micro-car[J].Journal of Sichuan Ordnance,2009,30(8):63-64.
[3]王德倫,張石靜,許南紹.電動汽車行星齒輪式無級變速器建模與仿真[J].重慶理工大學學報:自然科學版,2010,24(11):11-15.
WANG De-lun,ZHANG Shi-jing,XU Nan-Shao.Modeling and simulation of planetary gear-type continuously variable transmission of electric vehicle[J].Journal of Chongqing University of Technology:Natural Science Edition,2010,24(11):11-15.
[4]LIU Xin,GUO Shu-xu,CHANG Yu-chun,et al.Simple digital PWM and PSM controlled DC-DC boost converter for luminance-regulated WLED driver[J].The Journal of China Universities of Posts and Telecommunications,2009,16(2):98-102.
[5]歐健,房占鵬,王林峰.汽車ESP系統模型和模糊控制仿真[J].重慶郵電大學學報:自然科學版,2010,22(4):516-520.
OU Jian,FANG Zhan-peng,WANG Lin-feng.Dynamic model and simulation of fuzzy controlling for vehicle ESP[J].Journal of Chongqing University of Posts and Telecommunications:Natural Science Edition,2010,22(4):516-520.
[6] 孫桓,陳作模,葛文杰.機械原理[M].7版.北京:高等教育出版社,2006:214-232.
SUN huan,CHEN Zuo-mo,GE Wen-jie.Theory of machines and mechanisms[M].7th ed.Beijing:Higher Education Press,2006:214-232.
[7] 饒振剛.行星齒輪傳動設計[M].北京:化學工業出版社,2003:136-147.
RAO Zhen-Gang.Design of planet gear transmission[M].Beijing:Chemical Industry Press,2003:136-147.
[8]李興華,黃宗益,張承航.三自由度行星變速器傳動方案設計[J].中國機械工程,2002,13(20):1727-1729.
LI Xing-hua,HUANG Zong-yi,ZHANG Cheng-hang.Conceptual design of 3-DOF planetary transmission[J].China Mechanical Engineering,2002,13(20):1727-1729.
[9]張明成.功率分流式封閉滾動軸承行星減速器的設計研究[J].機械傳動,1999,23(1):12-13.
ZHANG Ming-cheng.The research of Power split closed rolling bearing planetary reducer design[J].Journal of Mechanical Transmission,1999,23(1):12-13.
[10]李增剛.ADAMS入門詳解與實例[M].北京:國防工業出版社,2006:59-81.
LI Zeng-gang.Introduce the details of ADAMS and explain with case[M].Beijing:National Defence Industrial Press,2006:59-81.
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
財經界(學術版)(2015年20期)2015-12-23 09:20:13
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31