配電網故障定位中通信系統協議設置
2012-06-01 02:55:14付文博
電子科技 2012年11期
付文博,李 峰,曹 盛
(1.滄州供電公司生產調度部,河北滄州 061001;2.華北電力大學電子與通信工程系,河北保定 071003)
隨著電力系統的快速發展,人們對經濟、可靠、安全的用電要求越來越高。能夠準確快速地找出故障點尤為重要。這不僅可以節省大量人力物力,而且對于社會發展和人們的生活也有較大影響[1]。文中采用無線自組織網絡(Ad hoc)實現對10 kV配電網單相接地故障的定位。著重分析了無線自組織網絡中協議的選擇。
文中利用無線自組織網絡(Ad hoc)傳輸每一節點的故障信息,信息經過多跳傳輸到中心站。無線自組織網絡是由一些帶有無線通信模塊的節點,通過無線信道連接形成,強調無中心接入和多跳路由[2]。在無線自組織網絡中,由于無線通信覆蓋范圍的有限性,兩個無法直接通信的節點可以利用其他節點的路由轉發功能進行通信,即經過多跳,這是無線自組織網絡和其它移動通信網絡的根本區別。
無線自組織網絡是一種特殊的無線移動網絡。網絡中所有結點地位平等,無需設置任何中心控制結點。網絡中結點兼備主機和路由器兩種角色,即不僅具有普通移動終端所需的功能,而且具有報文轉發能力。一方面負責本片信息采集與發送,另一方面也負責傳送其他節點發送的信息[3]。
1 系統概述
文中提出一種采用無線自組織網絡(Ad hoc)的在線故障定位方法,即在配電網上以一定間距安裝無線節點,架構無線網絡,對配電網進行實時監控。無線節點既是主機又是路由。一方面負責本機信息的采集與發送,另一方面也負責其他節點信息的轉發。例如圖1中的節點2,既要將本機的信息發送到中心站又要將節點1的信息轉發到中心站;節點8既要將本機信息發送到中心站又要將節點5和節點7的信息轉發到中心站。
在系統單相接地故障發生時,故障點兩側會有零序電流產生,并且故障點兩側零序電流的相位相反,由零序電流采集器得到故障點兩側零序電流相位信息,將信息通過多跳的方式傳輸到中心站,然后中心站計算分析得出故障區段。故障區段的長短由節點分布的疏密程度而定,文中定為1 km。拓撲結構如圖1所示。
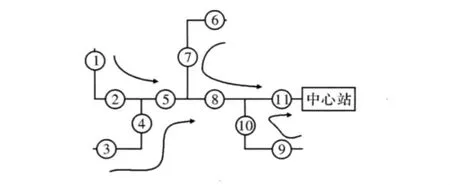
圖1 拓撲圖
2 NS2軟件介紹
NS2(Network Simulator Version 2)是一種面向對象的離散事件模擬器,擴展性強、開放性好[4]。主要應用于網絡仿真,解決網絡問題,可用于 Windows和Linux系統。
NS2軟件已經被廣泛應用,具有一定的權威性。NS2包含多個模塊,如 Tcl、Nam、xgraph等,還包含豐富的網絡模塊,對現在的網絡協議提供了良好的支持。源碼開放和免費的軟件模擬平臺使得研究人員可以方便地進行網絡開發。
3 協議設置
系統應用于配電網故障定位,每隔一段距離安裝節點,所以拓撲結構基本成鏈式會有分支。節點移動性小,拓撲結構穩定。根據這些特點選擇協議以適應系統需求。
3.1 路由協議
按照路由建立的方式不同,無線自組織網絡的路由協議可以分為3種[5-6]:先應式路由協議、按需路由協議和混合路由協議。
先應式路由協議又稱為表驅動路由協議,節點需要實時維護路由表,路由表中保存完整的信息。
按需路由協議又稱為反應式路由協議,節點不需要實時維護路由表,只有當有信息需要發送時才進行路由選擇。
文中利用NS2軟件對AODV、DSR和DSDV這3種路由協議進行仿真對比。分別在節點數不同和停留時間不同情況下比較了端到端延時和分組投遞率。
3.1.1 節點數不同
通信場景:ns cbrgen.tcl-type cbr-nn 20-seed 1-mc 10-rate 2.0
移動場景:./setdest-n 20-p 0-M 20-t 100-x 1000-y 300
在1 000×300的范圍內設置20~80個節點,最大移動速度20 m/s,仿真時間100 s。

圖2 端到端延時
從圖2中可以看出,當節點數較少時,DSDV的延時較小,當節點數超過50時延時較大。這是由于DSDV是先應式路由協議時刻都在維護路由表,隨著節點數增加分組數也在增加,從而延時增加較大。

圖3 分組投遞率
從圖3中可以看出,AODV和DSR的分組投遞率較高,節點較少時可達到100%。DSDV的分組投遞率較低。
3.1.2 停留時間不同
通信場景:ns cbrgen.tcl-type cbr-nn 20-seed 1-mc 10-rate 2.0
移動場景:./setdest-n 20-p 0~70-M 20-t 100-x 1000-y 300
在1 000×300的范圍內設置20個節點,最大移動速度20 m/s,仿真時間100 s,停留時間0~70 s。
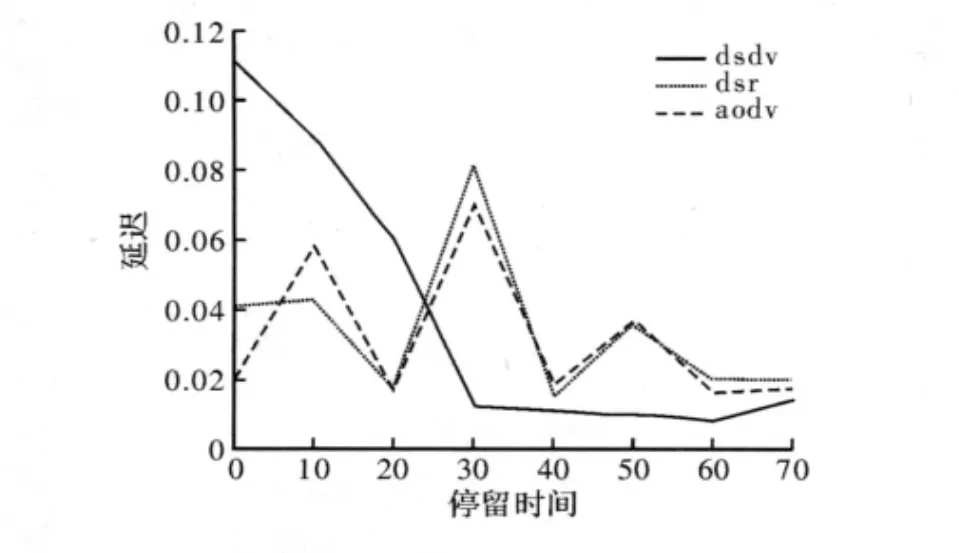
圖4 端到端延時
從圖4中可以看出,AODV和DSR的性能較穩定。當停留時間較大時相當于節點移動速度較小,這時DSDV的性能較好。
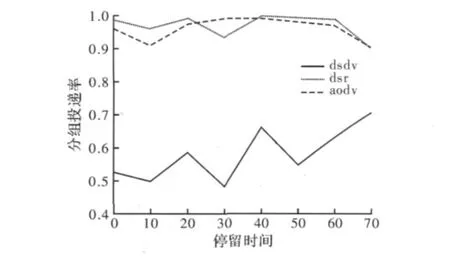
圖5 分組投遞率
從圖5中可以看出AODV和DSR性能明顯優于DSDV。
3.1.3 結果分析
當節點數較少,節點移動速度較小,又注重延時性時可以選擇DSDV。如果移動速度較大節點較多,則AODV和DSR的性能較好。
對于本系統,由于節點移動性較小,節點數較多,注重分組投遞率,所以選擇AODV協議。
3.2 MAC協議
信道接入協議采用載波偵聽機制。載波偵聽機制由物理載波和虛擬載波偵聽共同完成。物理載波通過節點周圍信號來判斷信道占用情況;虛擬載波是根據收到的信息分析信道被占用的時間,以確定自身需要的延遲。如圖6所示,A與B通信時,在發送數據之前先檢測信道是否空閑,如果空閑則發送RTS分組,否則等待一段時間并檢測。RTS分組中包括 CTS,DATA,ACK傳輸的時長。這樣節點C就知道需要退避多久,只要避開CTS分組就不會在A處發生碰撞。B收到后返回一個CTS分組,CTS分組中包括DATA和ACK傳輸的時長,這樣節點D就知道需要退避多久,只要避開DATA,就不會在B處發生碰撞。這樣就解決了隱藏終端和暴露終端的問題。
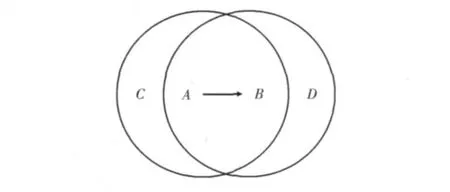
圖6 隱藏終端和暴露終端
文中還對是否采用RTS/CTS進行了仿真。在幀長不同的情況下對兩種接入方式的吞吐量進行了比較。結果如圖7所示。
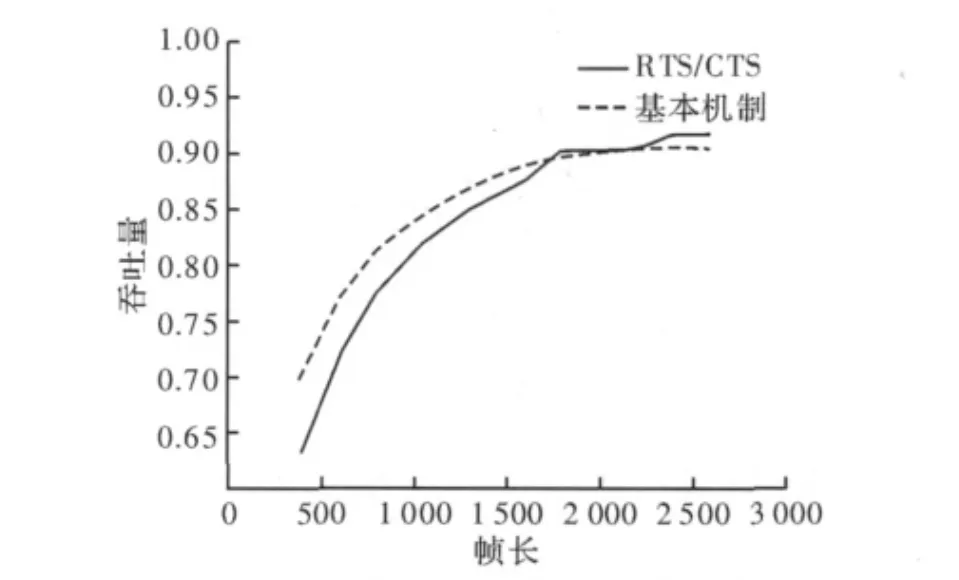
圖7 吞吐量
從圖7中可以看出,幀長較短時采用基本方式接入方式網絡的吞吐量較好,幀長較長時采用RTS/CTS接入方式較好。所以在設計系統時為提高網絡吞吐量設置了門限值,當小于門限值時采用基本方式接入方式,大于時采用RTS/CTS接入方式。
4 結束語
介紹的基于無線自組織網絡的配電網故障定位充分利用了無線自組織網絡的特性。通過NS2軟件的仿真分析選取了AODV路由協議,提高了系統的分組投遞率;并且找到了幀長的門限值從而提高了系統的吞吐量。提出的方法實現了對配電網的實時在線監控,具有體積小、低功耗、高速率且成本低等優點。能夠快速準確的定位故障區段,大幅減少了人力物力的消耗,在配電網故障定位方面有較大的發展空間。
[1]戚宇林,李博輝,劉超.無線自組織網絡在配電網接地故障監控中的應用[J].通信技術,2008(6):204-206.
[2]于宏毅.無線移動自組織網[M].北京:人民郵電出版社,2005.
[3]韓露.移動自組網路由協議研究[D].武漢:華中科技大學,2006.
[4]金偉,劉方愛,王曉潔.基于NS的Ad hoc網絡路由協議仿真研究[J].計算機技術與發展,2010,20(1):63 -66.
[5]周杰.Ad hoc網絡中三種典型路由協議的仿真分析與比較[J].大眾科技,2010(1):57-58.
[6]孫亦佳.無線Ad hoc網絡按需路由協議的研究與仿真[D].成都:電子科技大學,2008.
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
經濟技術協作信息(2018年32期)2018-11-30 01:43:16
汽車維護與修理(2016年10期)2016-07-10 08:17:41
電子制作(2016年23期)2016-05-17 03:54:05
電測與儀表(2016年5期)2016-04-22 01:14:14
河南電力(2016年5期)2016-02-06 02:11:24
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
電測與儀表(2015年13期)2015-04-09 11:57:38
