水庫大壩變形觀測的有效措施探討
2012-04-13 09:58:04劉曉
黑龍江水利科技 2012年12期
劉曉
(遼寧省白石水庫管理局,遼寧朝陽122000)
1 GPS靜態定位的優點
1)定位精準度高,所需的觀測時間短。運用載波相位觀測來做出相應的定位,根據以往許多的實踐表明,使用GPS的相對定位精準度可以在50 km以內達到10-6,只需要有15~20 min的時間就能夠完成在20 km以內的相對靜態定位,這是其他定為手段所不能達到的。
2)各個測試站之間不需要進行通視。這極大地減少了對一些常規測量方法中所需要的制造標志、掃除通視障礙等等所需要的費用。
3)沒有時間限制。GPS系統可以進行全天候觀測,不會受到陰天、黑夜、大霧、大風、雨雪等氣候的影響。
4)為統一的坐標系統提供3D立體信息。GPS定位對于坐標的計算是在國際統一坐標系統中進行的,不同地點的測量成果都具有一定的關聯性,傳統的大地測量方法是采用不同的方法對平面和高程分別進行測量,測量出來的數據只是2D平面的,而GPS可以同時精確測量地點的3D坐標。
5)操作簡單便捷。隨著GPS接收機的不斷改進,它的自動化水平越來越高,有的接收機已經達到了“傻瓜化”的程度;GPS接收機的體積在不斷減小,重量也隨著減輕,極大地緩解了測量工作者的緊張情緒和降低了勞動強度,讓測量工作者的野外工作變得輕松愉快。
6)功能多、應用廣。GPS系統不僅可用于測量、導航,還可用于測速、測時等。
2 大壩變形因素分析
大壩變形的原因主要有以下幾種:
2.1 靜水壓力
1)在靜水壓力的作用下,壩體不同高度處受到了不同的水平推力,促使壩體形成撓曲變形。
2)由于水庫水壓及壩底揚壓力對大壩的作用,從而使得壩體向下游方向轉動,最終引起大壩變形。
3)由于受到水庫水體自身的重力作用,水庫庫底變形,從而使得大壩的壩基向上游方向轉動,最終引起大壩變形。
2.2 壩體的溫度變化
大壩壩體的上下游混凝土的溫度變化不同,例如在夏季,大壩下游的混凝土整天受到太陽的暴曬,溫度上升的快,一段時間過后,溫度高于當天氣溫,可是在大壩的上游面,大部分的混凝土是處在水下的,太陽無法直射,所以溫度就低于氣溫;在冬季,情況相反。這種溫度的變化使大壩產生了季節性的擺動。壩體溫度變化而引發的混凝土脹縮是導致壩頂下陷的主要因素。另外,一些剛建成的大壩,壩體本身的混凝土也會產生熱脹冷縮的狀況,這也間接導致了壩體變形。
2.3 時效變化
由于混凝土的收縮變化等等一些建筑材料的變形,再加上基礎巖層在荷載作用下的變形而產生時效變化。時效變化的主要特點就是施工期間與運營的初期現象比較明顯,隨著時間的推移就會逐漸穩定,出現時效變化也就越來越少。時效變化是不可避免的。
3 測量實施
根據我國現有的對于大壩的觀測資料來看,壩基發生變形主要是由于垂直位置的移動和傾斜方面的變化,受到溫度的影響可以忽略不計。對于大壩變形觀測的主要內容是壩體的垂直和水平移動以及撓曲方面的觀測。對于垂直移動觀測,主要使用的是:①精準水準測量、GPS等等技術;②水平移動的觀測是采用前方交會、GPS等項技術;③對撓曲情況的觀測主要采用正、倒線觀測系統。另外還會對大壩進行裂縫監測,以及大壩壩體的溫度、壓力的變化也都需要進行觀測。本文主要是對水平和垂直位移進行觀測。
3.1 大壩變形觀測設計
在大壩變形觀測中最基礎的就是要設計基準點,并且必須要保證基準點的堅固和穩定。所以基準點應該要選擇大壩變形區以外的地址較好,又能夠永久保存的地方。為了對基準點的穩定進行檢驗核準,在水平和垂直位移監測的基準點都是以組的形式存在。水準基點組都是選在距離水庫1 km的地方,有3個點組成一個等邊三角形。水平位移的基準點是選在距離水庫約1.5 km的遠離變形區的地方。3個基準點,兩兩互相通視,這樣方便使用大地測量方法來對所設立的每個基準點進行檢核。
3.1.1 水平位移觀測
水平位移觀測方法是采用布設GPS監測網,在大壩的壩腳、壩坡以及壩頂布設3個監測網,用連接的方式分別將這3個監測網與已經設定的,距離大壩有1.5 km的4個基準點進行聯測。將基準點、工作基點以及校核基點都列入主網的范圍,進行統一觀測。為了能夠提高GPS網的精確度與可靠度,GPS的每個點與點之間要構成盡量多的異步環,這個異步環是由GPS獨立邊組成的,能夠讓GPS網具有足夠的多余觀測。
3.1.2 垂直位移觀測
垂直位移觀測采用精密水準測量法,在大壩開外1 km的地方設置3個基準點,使用電子水準儀進行觀測,并且與國家所建立的二等水準點進行聯合觀測,來測定基準點的高程。從基本水準點開始進行測量,然后依次經過大壩的壩腳、壩坡以及壩頂,這樣就能夠形成一個閉合的觀測路線,從而對大壩的垂直位移進行觀測。
3.2 GPS網觀測
采用3臺由日本托普康公司所生產的精密Top Con Hi Per雙頻GPS接收機來對大壩變形進行觀測,該儀器配備有可以抑制多路徑效應的扼流圈天線,作業采取的方式是用靜態相對定位的方法來進行觀測。
3.3 數據處理
3.3.1 基線解算
由于GPS網對于數據的要求較高,所以在進行基線向量解算時一定要將對流層對數據的影響納入考慮范圍,采用特殊的軟件對對流層所產生的影響進行改進解決,還需要采用精密星歷的方法來進行解算,得出的基線結果要用雙差固定解。
3.3.2 GPS網平差
在完成基線解算之后,在WGS-84坐標系下進行3D無約束平差,對于無約束平差需要對其參數進行統計檢驗:
1)方差分量因子估值σ2檢驗;
2)每個改正數粗差的檢驗。
為了能夠提高GPS測量的精確度與可靠性,在完成無約束平差計算之后,還應該及時對同步環閉合差、異步環閉合差以及復測邊等項進行檢查計算,在基線解算質量檢核的基礎上,進一步對GPS網內部符合精度與外業觀測的質量進行檢測,產生的獨立閉合環坐標閉合差應滿足以下條件:
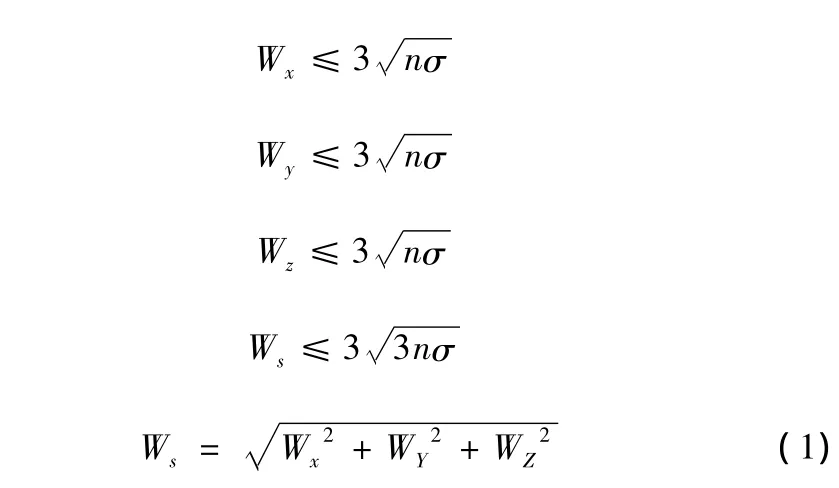
式中:σ為標準差;Ws為環閉合差,n為獨立環中邊數。
基線分量的改正數絕對值應滿足下式:
V△x≤3σ V△y≤3σ V△z≤3σ σ為相應級別規定的基線的精度。
4 提高精度的措施
1)采用強制對中的觀測墩。如果將GPS天安裝在三腳架上進行觀測,那么產生的對中誤差一般是在1~3 mm,并且當GPS觀測的時間比較長的時候,三腳架的腳架就會因為受到風水以及日曬而發生變形,從而影響測量的精準度,所以,在GPS變形監測點上應該采用強制對中的觀測墩,把觀測墩作為測量標志,并且要妥善保護,防止它受到破壞。
2)采用具有強抗干擾能力的天線,并在觀測中將天線朝北進行定向。GPS天線的相位中心的偏差一般都只有幾mm,為了能夠減少天線所存在的定向誤差對GPS基線向量的影響,需要在每個觀測墩上標出指向北方的標志,在進行觀測時要將天線按照定向線的位置進行安置。
3)安排足夠的觀測時間以及選擇恰當的窗口進行觀測。衛星星歷所造成的誤差對于GPS的基線具有一定的影響,在采用廣播星歷受到可用性技術干擾時,不同時刻所收集到的廣播星歷在坐標框架中的方向偏差就會有2″,尺度偏差范圍在10-6~10-7,這種偏差對大壩變形觀測的結果具有較大的影響。
研究表明,如果觀測的時間較長,那么只要對收到的星歷進行擬合,就可以提高星歷的精確度,還能夠滿足大壩變形觀測的需求。所以,在采用GPS技術對大壩進行形變監測時,一定要有的足夠的時間來觀測,與此同時,延長觀測時間還能夠減少隨機誤差的產生,進一步提高觀測精確度。
4)制定合理的觀測方案。方案中需要注意的是,一定要保證有足夠的多余觀測,以便于剔除粗差,減少誤差的積累。
5 結語
隨著科學技術的不斷發展與進步,測繪技術也是在不斷發展,GPS系統的應用范圍將更加廣闊,也必定會出現更好的水庫大壩GPS自動化變形監測系統。
[1]楊光,何秀鳳,華錫生,等.GPS一機多天線在小浪底大壩變形監測中的應用[J].水電自動化與大壩監測,2003,27(3):52-55.
[2]胡友健,梁新美,唐輝明.關于滑坡監測精度及復測周期的合理確定[J].地質科技情報,2002,21(2):91-93.
[3]王家幫,李忠財,李海文.GPS技術在某電視塔的變形監測中的應用[J].大眾科技,2010(06):39-40.
[4]盧欣春,鄒念椿,戰暉.激光光束對大壩變形監測精度的影響因素及解決方法[J].水電自動化與大壩監測,2006,30(5):43-45.
[5]趙同龍,趙吉濤,路奎.前方交會三角測高法變形監測應用研究[J].山東建筑大學學報,2010,25(3):347-350.
[6]張琳,易亞星,劉志勤.真空激光準直系統在大壩變形監測中的應用[J].水利與建筑工程學報,2007,5(04):111-113.
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21