船搖對組陣天線信號(hào)合成效率的影響
2012-03-18 08:10:06毛南平李其福房新兵
電訊技術(shù) 2012年8期
關(guān)鍵詞:信號(hào)
毛南平,李其福,房新兵,李 培
(中國衛(wèi)星海上測控部,江蘇 江陰214431)
1 引 言
深空探測是我國航天測控發(fā)展的必然趨勢,天線組陣又是深空探測領(lǐng)域的一項(xiàng)關(guān)鍵技術(shù)[1]。陸基固定站天線組陣下行接收技術(shù)國內(nèi)外均進(jìn)行了大量研究,相關(guān)理論比較成熟[2],但對于測量船動(dòng)平臺(tái)的天線組陣可行性及關(guān)鍵技術(shù)未進(jìn)行研究。從我國測控網(wǎng)安全性和完備性角度出發(fā),研究和應(yīng)用船載測控設(shè)備天線組陣術(shù),提高測量船深空測控能力,利用測量船布站靈活的優(yōu)勢,滿足深空探測任務(wù)發(fā)射段、早期軌道段的測控支持和特殊情況下不間斷覆蓋測控的需要具有重要意義。
從天線組陣的原理可知,天線組陣的關(guān)鍵技術(shù)是對各天線信號(hào)進(jìn)行合成,信號(hào)合成的前提就是通過相關(guān)運(yùn)算解算出各信號(hào)的時(shí)延或相位差值并修正取齊,而時(shí)延或信號(hào)相位差值可以從組陣天線對目標(biāo)的距離差值推算出[3],因此研究測量船動(dòng)平臺(tái)天線組陣技術(shù)必須研究船搖對天線組陣的影響,即必須先建立船搖對天線指向目標(biāo)的距離差值的數(shù)學(xué)模型。另外,信號(hào)合成是通過相關(guān)運(yùn)算來完成的,相關(guān)運(yùn)算時(shí)間(積分)越長,時(shí)延精度越高,但要保證相關(guān)運(yùn)算有效,運(yùn)算時(shí)間要求小于載波1/8 個(gè)周期,而相關(guān)運(yùn)算時(shí)間與組陣天線指向目標(biāo)的距離差變化率相關(guān),本文在對距離差值的變化率建模后通過仿真計(jì)算分析船搖對船載各頻段天線信號(hào)合成的影響。
2 船載天線相對目標(biāo)距離差值變化率數(shù)學(xué)建模
2.1 測量船坐標(biāo)系、姿態(tài)角定義
距離建模前必須對測量船常用坐標(biāo)系、測量船姿態(tài)角進(jìn)行定義。
2.1.1 測量船坐標(biāo)系規(guī)定
在進(jìn)行數(shù)學(xué)建模前,先規(guī)定各坐標(biāo)系的符號(hào)及方向[4]。
(1)大地坐標(biāo)系(X 、Y 、Z)
OX :正北方向;OY :垂直水平面向上;OZ :按右手定則確定。
(2)甲板坐標(biāo)系(XC、YC、ZC)
OXc:沿船首尾線向艦首方向;OYc:垂直甲板平面向上;OZc:按右手定則確定。
(3)大地極坐標(biāo)系,符合右手定則,A、E、r
A:方位角,天線在水平面的投影與正北的夾角,順時(shí)針為正;E:俯仰角,天線在水平面的投影與天線的夾角,向上為正;r:距離,天線至目標(biāo)的空間距離。
(4)甲板極坐標(biāo)系,Ac,Ec,r
Ac:甲板方位角,天線在甲板平面投影與OXc軸夾角,順時(shí)針為正;Ec:甲板俯仰角,天線在甲板平面投影與天線的夾角,向上為正;r:距離,天線與目標(biāo)間的距離。
2.1.2 測量船姿態(tài)角規(guī)定
測量船船姿船位系統(tǒng)提供的測量船姿態(tài)角主要有航向角、縱搖角和橫搖角,其符號(hào)及方向分別規(guī)定如下:
H:航向角,船首尾線在水平面的投影與正北的夾角,順時(shí)針方向?yàn)檎?
P :縱搖角,船首尾線相對水平面的轉(zhuǎn)角,船首抬高為正;
R :橫搖角,繞首尾線相對水平面的轉(zhuǎn)角,右弦下降為正。
2.2 距離建模
以同一艘測量船的兩個(gè)相鄰測控天線為例進(jìn)行距離差值分析。船上兩個(gè)天線接收信號(hào)時(shí),兩組陣天線指向目標(biāo)的距離差值在船坐標(biāo)系中空間幾何關(guān)系如圖1 所示,設(shè)圖中待求差值距離為d,待求角為β。
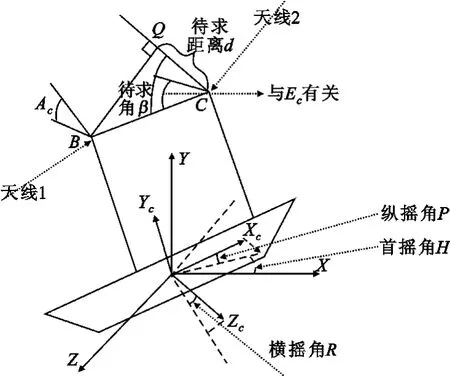
圖1 兩天線指向同一目標(biāo)距離幾何關(guān)系圖Fig.1 Geometrical relation of range when two antennas point to the same taget
過天線1 與天線1 在船面的投影的交點(diǎn)B 向天線2 在船面的投影做垂線,交點(diǎn)為F。過F 點(diǎn)做CF 的垂線與天線2 交于D 點(diǎn),連接BD ,則問題轉(zhuǎn)化為在圖2 的四面體中求角度。
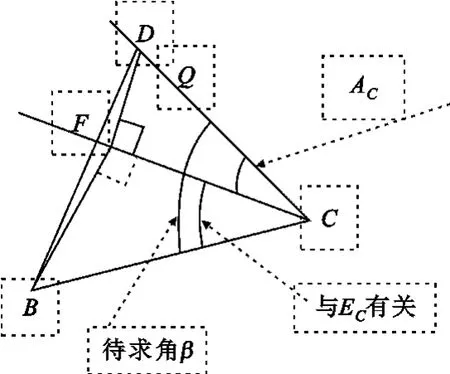
圖2 距離差值簡化圖Fig.2 Simplified figure of range difference
由相關(guān)設(shè)備求出天線在地理極坐標(biāo)下的方位角E,俯仰角A,由船姿船位系統(tǒng)給出船姿態(tài)角(航向角H 、縱搖角P 和橫搖角R),由坐標(biāo)變化公式,求出首搖、橫搖、縱搖后天線在天線甲板極坐標(biāo)系下的方位角Ec、俯仰角Ac,再求出與Ec有關(guān)的角β。
設(shè)兩天線的連線BC 與OXc軸夾角為ε,過BC與OXc的交點(diǎn)G 做天線軸在船平面投影CF 、BK 的平行線,如圖3 所示,則β=π- Ec-ε。
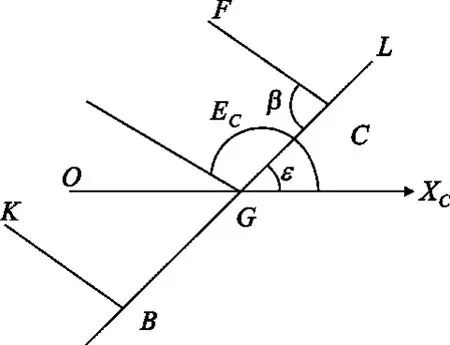
圖3 β 與Ec 的關(guān)系圖Fig.3 Relation between β and EC
在四面體BCDF 中:

在■BCD 中,根據(jù)余弦定理得

兩天線距離目標(biāo)的距離差為

大地坐標(biāo)系到甲板坐標(biāo)系的轉(zhuǎn)換公式
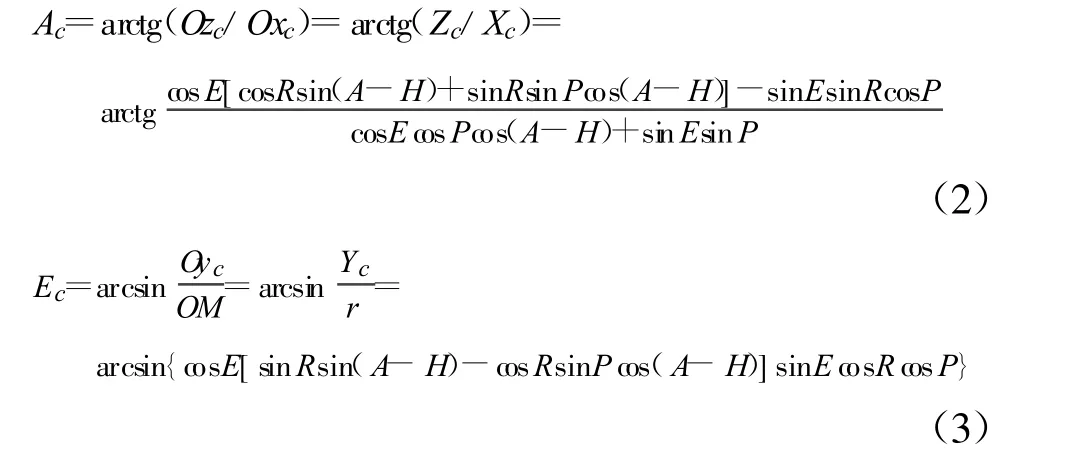
將式(2)、(3)迭代入式(1)即可得出兩天線指向目標(biāo)的距離差與船搖角度的關(guān)系式。
3 仿 真
第2 節(jié)推導(dǎo)出同一測量船上兩天線對同一目標(biāo)距離差值與船搖參數(shù)的數(shù)學(xué)模型,本節(jié)根據(jù)船搖的參數(shù)對兩天線距離差值及差值變化速率進(jìn)行仿真,將測量船某次海上跟蹤目標(biāo)時(shí)的實(shí)際船搖數(shù)據(jù)代入數(shù)學(xué)模型對兩天線指向目標(biāo)的距離差值及距離差速率進(jìn)行仿真(仿真時(shí)取兩天線距離30 m、方位角45°、俯仰角45°),兩天線距離目標(biāo)的距離差d 隨時(shí)間的變化如圖4 所示,對距離差值進(jìn)行差分處理得出距離差值的變化率如圖5 所示。

圖4 距離差隨時(shí)間的變化關(guān)系圖Fig.4 Relation between range difference and time

圖5 距離差的變化速率隨時(shí)間變化關(guān)系圖Fig.5 Relation between speed of range difference and time
距離差值變化速率與天線方位、俯仰角度之間的變化關(guān)系如圖6 和圖7 所示。

圖6 距離差的變化速率隨A 變化關(guān)系圖Fig.6 Relation between speed of range difference and antenna′s azimuth angle

圖7 距離差的變化速率隨E 變化關(guān)系圖Fig.7 Relation between speed of range difference and antenna′s pitch angle
從圖5、圖6 可以看出,組陣天線指向目標(biāo)的距離差值變化速率與天線的方位、俯仰角度有關(guān),可以通過改變天線的方位、俯仰角度來降低天線指向目標(biāo)的距離差值變化率的絕對值,這為后續(xù)測量船船舶測量工況的設(shè)計(jì)提供依據(jù)。
4 對天線組陣信號(hào)合成的影響分析
根據(jù)參與組陣的兩個(gè)天線距離差值變化速率可以求出接收信號(hào)的相對相位差的變化率為360×v/c×f(°/s),其中v 為速率差值, c 為光速, f 為信號(hào)頻率。
參考第3 節(jié)中船載組陣天線接收信號(hào)的相對距離差的變化仿真結(jié)果,我們?nèi)【嚯x差的變化速率采用v=0.1 m/s。以S 頻段為例,信號(hào)合成采用全頻譜合成方案[5],信號(hào)頻率f =2.2 GHz,兩個(gè)天線接收信號(hào)的相對相位差的變化為
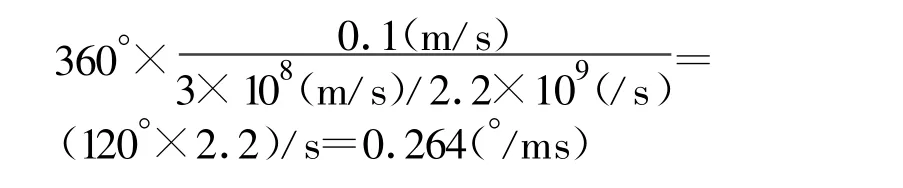
一般來說,要完成兩個(gè)信號(hào)之間相對相位差的測量,要求在相關(guān)運(yùn)算時(shí)間內(nèi)信號(hào)之間的相對相位差的變化不大于45°。所以,要求相關(guān)運(yùn)算時(shí)間不大于45°/0.264=170 ms。
同樣高頻(如X)信號(hào),設(shè)信號(hào)頻率8.5 GHz,則兩個(gè)天線接收信號(hào)的相對相位差的變化為相應(yīng)的相關(guān)運(yùn)算時(shí)間不大于45°/(1.008)=45 ms。

從上述計(jì)算的結(jié)果分析, 船搖對組陣天線信號(hào)合成的影響主要表現(xiàn)在參與組陣的天線指向目標(biāo)的距離差值變化速率對全頻譜信號(hào)相關(guān)時(shí)間的影響,船搖幅度越大, 距離差值變化速率相應(yīng)增大, 信號(hào)頻率越高, 信號(hào)合成積分時(shí)間則越短, 在較短的時(shí)間內(nèi)要獲得較為精確的信號(hào)相位差相對比較困難,因此信號(hào)合成的效率應(yīng)不會(huì)很高;當(dāng)頻率提高到Ka 頻段時(shí), 相關(guān)運(yùn)算時(shí)間僅為10 ms左右, 基本無法進(jìn)行信號(hào)合成。另外, 積分時(shí)間與合成效率的關(guān)系還與接收機(jī)環(huán)路帶寬有關(guān), 分析較為復(fù)雜, 本文不作詳細(xì)分析。
5 結(jié)束語
通過對單船多測控天線指向同一目標(biāo)的距離差值隨船搖變化的數(shù)學(xué)模型分析來看,組陣天線指向目標(biāo)的距離差值變化速率可以通過改變天線的方位、俯仰角度來降低,本文研究成果為后續(xù)測量船船舶測量工況的設(shè)計(jì)提供了依據(jù)。另外,組陣天線與飛行器的相對距離差值變化速率是影響船載高頻測控天線組陣的關(guān)鍵因素,因此船載高頻測控天線組陣研究必須對船體運(yùn)動(dòng)及船搖相關(guān)技術(shù)進(jìn)行研究分析,如何克服船體運(yùn)動(dòng)及船搖來完成組陣天線間信號(hào)延遲量的測量與估計(jì),是保證信號(hào)高效合成的關(guān)鍵技術(shù),也是我們后續(xù)研究的重點(diǎn)。本文研究成果可為后續(xù)測量船裝載高頻測控天線組陣可行性認(rèn)證提供技術(shù)參考。
[1] 姚飛.深空通信天線組陣關(guān)鍵技術(shù)及其發(fā)展趨勢[ J] .宇航學(xué)報(bào),2010,31(10):2231-2238.
YAO Fei.Key Techniques and Development Trend of Antenna Arraying for Deep Space Communicat[ J] .Journal of Astronantics, 2010,31(10):57-60.(in Chinese)
[2] 洪家財(cái).天線下行組陣技術(shù)及其試驗(yàn)驗(yàn)證研究[ J] .裝備指揮技術(shù)學(xué)院學(xué)報(bào), 2011,22(1):58-62.
HONG Jia-cai.Study on Downlink Antenna Array Technology and Its Test Verifying [J] .Journal of Academy of Equipment command &Technology, 2011,22(1):58-62.(in Chinese)
[3] 李海濤.深空探測中的天線組陣技術(shù)[ J] .飛行器測控學(xué)報(bào),2004,23(4):57-60.
LI Hai-tao.Antenna arry forming Technology in Deep space exploration[ J] .Journal of Spacecraft TT&C Technology,2004, 23(4):57-60.(in Chinese)
[4] 張志遠(yuǎn).艦船姿態(tài)坐標(biāo)變換及穩(wěn)定補(bǔ)償分析[ J] .艦船科學(xué)技術(shù),2009,31(4):34-40.
ZHANG Zhi-yuan.Coordinate transformation of Warshippose and analysis ofstabilization compensation[ J] .Ship Science and Technology, 2009,31(4):34-40.(in Chinese)
[5] 鐘曉玲.天線組陣信號(hào)合成技術(shù)的研究[ J] .遙測遙控,2007, 28(增刊):43-48.
ZHONG Xiao-ling.Research on the antenna arraying signal combinning technique[J] .Journal of Telemetry,Tracking and Command, 2007, 28(Suppl.):43-48.(in Chinese)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06