PID控制器在磁懸浮球系統實驗中的應用
2012-02-26 10:51:46
裝備制造技術 2012年1期
關鍵詞:系統
(海軍航空工程學院青島分院,山東 青島 266041)
PID控制器問世至今已有近70年歷史,其以結構簡單、穩定性好、工作可靠、調整方便而成為工業控制的主要技術之一。本文設計了一個PID控制器對實驗室已有的磁懸浮系統通過PID控制器參數的調整進行優化。然后利用Matlab軟件對控制系統進行了仿真并通過仿真圖形進行性能分析,實現了對磁懸浮球系統的穩定控制。實驗證實,該PID控制器的設計是正確可行的。
1 PID控制器系統的模型建立
實驗室建立的磁懸浮球系統如圖1。
圖1 磁懸浮球結構圖
已知的磁懸浮球系統的傳遞函數為
此時利用Matlab里的rlocus命令畫出該開環系統的根軌跡圖,如圖2。
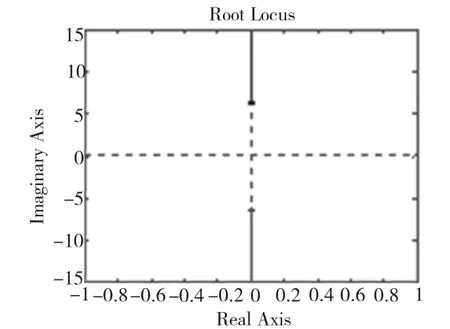
圖2 磁懸浮球系統根軌跡圖
對圖2進行分析可以看出,系統根軌跡分布在虛軸上,系統處于臨界穩定狀態,從現實意義上也是一種不穩定狀態,所以該控制器需要進一步的優化改進。
加入PID控制器后系統的方框圖形式如圖3。
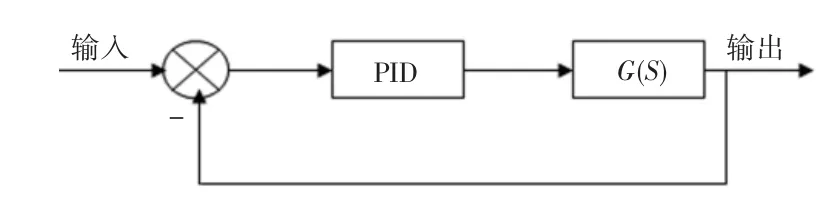
圖3 加入PID校正后磁懸浮球系統方框圖
設PID控制器的傳遞函數為
式中,
KP為比例系數;
TI為積分時間常數;
TD為微分時間常數。
此時,系統的閉環傳遞函數

其特征方程為

2 PID控制器KP、TI、TD這3個參數的選取
比例系數、積分時間常數、微分時間常數這3個參數的調整,主要根據它們對系統性能的影響來進行[1]。
比例系數KP對控制系統的影響:若 KP過大,則系統趨向于不穩定狀態;若過小,又會使系統的響應時間延長,影響系統快速性。
積分時間TI對控制系統的影響:積分時間常數通常會影響系統的穩定性。TI太小,系統會不穩定;太大對系統性能的影響減小。當TI取值合適時,系統過渡特性將會比較理想。
微分時間常數TD對控制系統性能的影響:TD偏大,會導致超調量增大,加大調節時間;偏小,調節時間也較長,只有TD取值合適時,才能有比較滿意的過渡過程。
至于微分時間常數TD和比例系數KP根據最佳阻尼比已經計算出結果
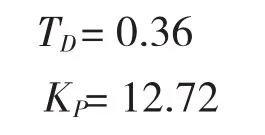
所以只需要確定積分時間常數TI的數值,就可以確定PID控制器的傳遞函數。
對于積分時間常數TI的確定,我們采用臨界靈敏度法[2],具體做法如下:
當已知系統的臨界比例增益KC和振蕩周期TC時,也可以用經驗整定公式來確定PID控制器的參數
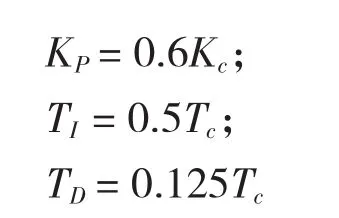
其中,特征參數Kc和Tc一般由系統整定實驗確定,或者用頻率特性分析算法,根據受控過程G(s)直接計算結果,即由增益裕度確定Kc,由截止頻率ωc確定 TC,即
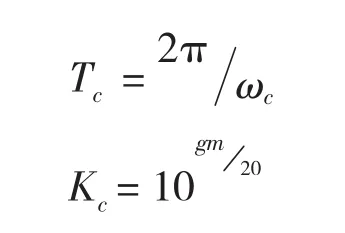
根據開環系統傳遞函數,即受控過程G(s)的截止頻率ωc=6.15 rad/s,由此可以計算得到振蕩周期TC=1.02,由于 TI=0.5 TC,得到 TI=0.51。
至此KP、TI、TD都已經計算得到了,數值分別為
則PID控制器的傳遞函數為

3 加入PID控制器后磁懸浮小球控制系統性能分析
加入PID控制器后,磁懸浮小球控制系統的閉環傳遞函數為

加入PID控制器后,系統對干擾信號的反應情況,利用Simulink仿真軟件進行仿真,在干擾信號為階躍信號作用下,系統的響應情況如圖4所示。
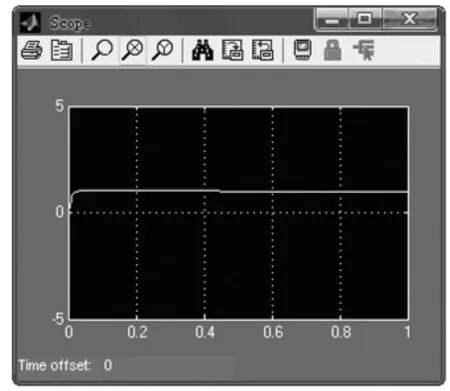
圖4 PID控制器階躍信號系統響應圖
從示波器的輸出波形可以明顯看出,加入PID控制器后,小球的抗干擾能力明顯提高,能夠維持穩定懸浮,說明采用PID控制器進行校正,能夠滿足控制要求。
另外,觀察此時的伯德圖和奈奎斯特圖也能夠證明這一點。
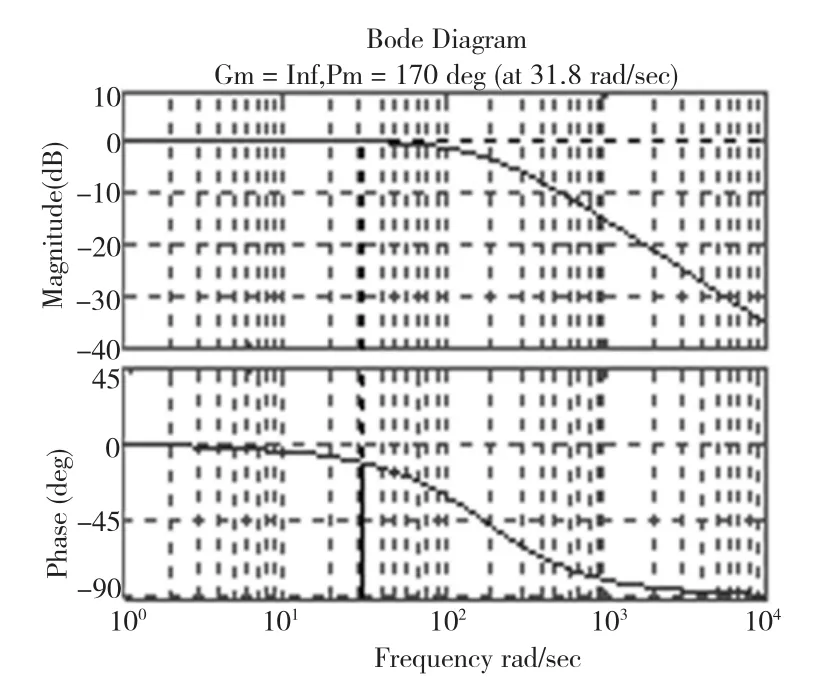
圖5 校正后系統的伯德圖
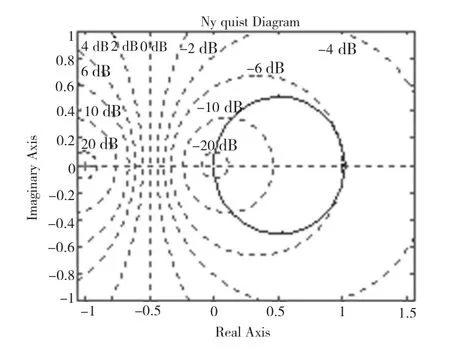
圖6 校正后系統的奈氏曲線圖
由于系統沒有右半平面的開環極點,從圖6可以看出,開環幅相曲線不包圍(–1,j0)點,系統穩定。另外,由圖5可以得系統的相角裕度γ=170°,由奈氏判據可知,系統閉環穩定。
4 結束語
綜上分析可以看出采用PID控制器可以使得系統的型別提高一級外,還能提供兩個負實部零點,不僅有效抑制了高頻干擾信號,提高了系統穩態性能,還提高了系統的反應速度,在系統動態性能方面,具有更大的優越性。
[1]任彥碩.自動控制原理[M].北京:機械工業出版社,2004.
[2]陶永華.新型PID控制及其應用[M].北京:機械工業出版社,1998.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
