基于運動控制器的數控試驗平臺設計
2012-02-20 08:49:46何苗
裝備制造技術 2012年6期
何苗
(四川信息職業技術學院,四川 廣元 628017)
機電一體化產品質量和技術水平的高低,已是當今世界衡量一個國家實力和國際地位的重要標志,運動控制器及其相關技術是各類機電一體化產品的核心技術,本課題的目的是通過對GT400運動控制器的二次開發,利用其提供的基本功能完成基于PC機的實驗數控工作臺設計。

圖1 硬件組成框圖
1 機電傳動系統設計
1.1 機械傳動部分
機電傳動系統的設計一般由動力源、變速機構、換向機構、運動分配機構、執行件等組成。常用的機械傳動部件有螺旋機構、齒輪傳動、同步帶以及各種非線性傳動部件,其主要目的是傳遞轉矩與轉速。該系統動力源采用VRDM397/LHA型步進電機;換向機構采用型號為FYC2D2504-3的滾珠絲杠,固定方式為一端固定,一段有隙,其優點在于壓桿穩定和臨界轉校高,而且絲杠有熱膨脹的余地。支承形式采用7603020TVP60接觸角角接觸球軸承一對,背靠背組合的形式。滾動直線導軌副時在滑塊與導軌之間放入適當的鋼珠,使滑塊與導軌之間的滑動摩擦變為滾動摩擦大大降低二者之間的摩擦阻力,有助于提高數控系統的相應度與靈敏度。因此在x、y向用滾動導軌副,型號為HJG-D25.
1.2 電器部分設計
伺服驅動部件是數控系統中與機械直接有關的部分,它們的性能決定了機床的本控制特性,所以正確合理的選擇可靠的伺服驅動部件對提高產品的功能起著決定性的作用。
步進電機是將電脈沖信號轉換成機械角位移的執行元件,其特點是:步進電機的工作狀態不易受各種干擾因素的影響,只要他們的大小未引起步進電機產生丟步現象之前,就不影響其正常工作:控制性能好。在啟動停止反轉時不易丟步。因此步進電機被廣泛應用于開環結構的機電一體化系統,使系統簡化,并可靠的獲得較高的位置精度。動力源采用VRDM397/LHA型步進電機。步進電機不能直接接到交流電源上工作,需要有步進電動機驅動電源。步進電機及其驅動電源是一個有機整體,步進電機運行性能是步進電機和驅動電源兩者的綜合效果。
步進電機驅動器采用雷塞535型驅動器。該驅動器內部采用類似伺服控制原理的電路,此電路可以使電機低速運行平穩,幾乎沒有震動和噪音,電機在高速時力矩大大高于二相和五相混合式步進電機,定位精度最高可達30 000步/轉。
2 檢測部分的設計
本次設計的工作臺要求進行往復運動加工產品,在工作臺達到極限位置時,必須自動停下來。另外機械原點是數控工作臺所有坐標系的基準點,機械原點的穩定性是該工作臺的一個極為重要技術指標,也是加工文寧的一個最基本的保證。像這一類的行程控制可以利用行程開關來實現。
電感式接近開關屬于一種有開關量輸出的位置傳感器,當金屬在接近時,使物體內部產生渦流。這個渦流反作用于接近開關,是開關內部電路的參數產生變化,由此識別出有無金屬物體接近,進而控制開關的通和斷完成無接觸檢測物體的目的。
根據工作臺精度要求及尺寸選型號為JG35L-F15TB,尺寸大小為35×33×70 mm的電感定位開關作為該數控工作臺的檢測原件。
3 故障診斷設計部分
隨著現代工業和科學技術的迅猛發展,現代機械設備本身的結構越來越復雜,功能越來越完備,自動化程度也越來越高。機械設備的故障診斷技術越來越受到重視,如果某臺設備出現故障而又未能及時發現和排除,其結果不僅會導致設備本身損壞,甚至可能會給生產和質量以至人們的生命財產安全造成難以估計的嚴重后果。
為適應試驗臺的工作要求將診斷部分的設計分為通訊出錯;命令錯誤;圓弧插補半徑不正確;直線插補長度為零或超出控制器處理范圍等幾塊,適合教學要求。
對于用戶通過主機發出命令,運動控制器在檢查校驗后會給出一個反饋,這個反饋就是命令(庫函數)的返回值。根據返回的值在界面上顯示相應的故障原因。比如,返回值為-1時,顯示通訊出錯;返回值為0時,顯示命令執行成功;返回值為1時,顯示命令錯誤;此時調用GT-Get(mdstsc)命令,進一步確定出錯原因,顯示在命令出錯函數的下一行,當出現命令錯誤時,通過判斷命令錯誤寄存器中的位,把可能引起命令錯誤的原因顯示在界面上。
(2)根據返回的值在界面上顯示相應的故障原因。返回值為-1時,顯示通訊出錯;而且重復調試用該命令多次仍返回-1,說明運動控制器的通訊出現故障,運動控制器沒有正確的接受主機命令;或是運動控制器的軟件運行不正常;不能正確處理主機命令;此時應停止程序運行。此時于診斷界面上顯示“通訊出錯”。框圖如圖2:

圖2 運動框圖
(2)如果該命令是單軸運動命令出錯,將引起當前軸運動狀態字的Bit7的置位。同時運動控制器的命令狀態積存器提供命令出錯的詳細原因,主機可通過調用命令GT-Get(mdstsc)得到命令出錯的詳細原因。返回值1表示當前軸狀態積存器的位置捕獲完成標志為1,或已經設定了GT_CaptIndex(GT_CaptHome)命令但位置尚未捕獲到時主機又發送了GT_CaptIndex命令。框圖如圖3:

圖3 運動框圖
(3)系統仿真界面如圖4所示:
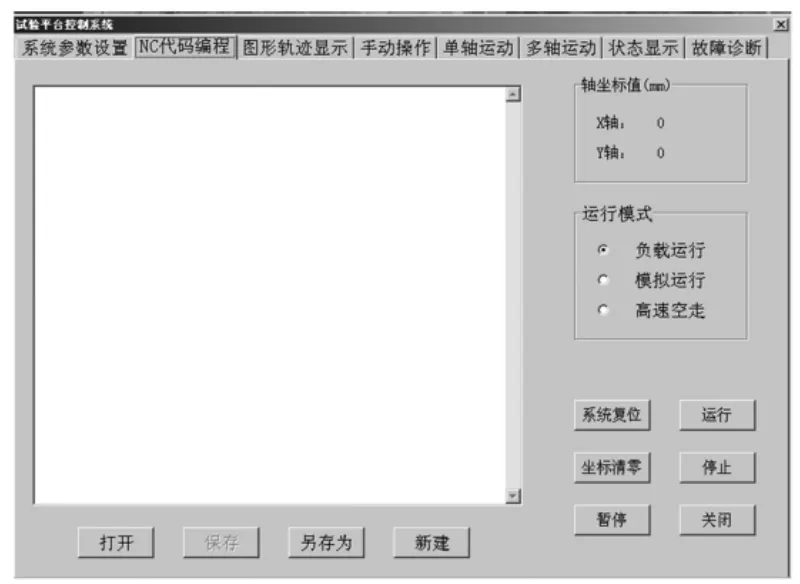
圖4 系統界面
4 結論
數控系統正朝著開放式、高精度、高速度、智能化、簡單化方向發展。作為一個具有開放式結構的數控工作臺,它為用戶提供了一個高度柔性的控制平臺,既允許用戶利用運動控制器提供的底層運動函數庫進行電機運動規則和控制方面的教學實踐,也允許用戶利用G代碼進行開放式數控系統的教學和研究,是高等工科院校機電一體化,自動控制等專業以及相關院校理想的數控教學實驗設備。
[1]固高科技有限公司.GT系列運動控制器編程手冊[M].2006.
[2]嚴愛珍.機床數控原理與系統[M].北京:機械工業出版社,2004.
[3]陳子銀.數控機床結構原理與應用(第2版)[M].北京:北京理工大學出版社,2009.
[4]馮 浩,汪建新,趙書尚.機電一體化系統設計[M].武漢:華中科技大學出版社,2009.
[5]李穎卓,張波,王茁.機電一體化系統設計(第2版)[M].北京:化學工業出版社,2010.
[6]文懷興,夏 田.數控機床系統設計(第2版)[M].北京:化學工業出版社,2011.
猜你喜歡
當代陜西(2020年13期)2020-08-24 08:22:02
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
制造技術與機床(2017年5期)2018-01-19 02:49:17
海峽姐妹(2017年7期)2017-07-31 19:08:17
金秋(2017年4期)2017-06-07 08:22:16
Coco薇(2017年5期)2017-06-05 08:53:16
中國材料進展(2016年10期)2016-12-26 06:50:20
濰坊學院學報(2016年2期)2016-12-01 13:00:11