麗江2.4米望遠鏡檢偏器控制系統設計*
2012-01-25 01:26:12辛玉新屈中權范玉峰張瑞龍和壽圣
天文研究與技術 2012年1期
辛玉新,屈中權,范玉峰,張瑞龍,和壽圣
(1.中國科學院云南天文臺,云南 昆明 650011;2.中國科學院研究生院,北京 100049;3.中國科學院天體結構與演化重點實驗室,云南 昆明 650011)
早在1811年,法國科學家D E Arago首先從月光里探測到偏振光的存在[1],從而拉開了天體輻射偏振測量的序幕。1948年前后,J S Hall和W A Hiltner對恒星做的偏振測量表明:大多數遠距離恒星的輻射是部分線偏振的,低銀緯的恒星在垂直于銀河旋臂的方向上偏振度較大[2]。雖然來自天體的偏振光被發現至今已有近200年的歷史,但有關夜天文觀測的天體偏振測量還相對較新,原因主要有兩個:第一,偏振測量技術上的困難;第二,恒星輻射的偏振光強度沒有天文學家預期的強。
偏振器是這樣一種儀器,自然光通過它后能成為顯著的偏振光,產生線偏振光的叫做線偏振器,如偏振片、尼科耳棱鏡等;產生圓偏振光或橢圓偏振光的叫做圓偏振器或橢圓偏振器。當某偏振器件被用來產生偏振光時就稱為起偏器,或簡稱偏振器,當它用來分析和檢測偏振光是否存在、屬何種類型時就稱為檢偏振器或偏振分析器。我國很早就在太陽觀測領域使用偏振分析器[3],但到目前還沒有成功進行夜天文偏振觀測。
一般來說,通過線檢偏器和1/4波片就能判斷偏振光的類型。具體方法簡要介紹如下:通過旋轉線檢偏器觀測強度的變化,若出射強度I沒有變化,則入射光可能是自然光、圓偏振光或部分圓偏振光的一種;若出射強度I有變化,且在某個角度φ達到極大值Imax,則入射光為線偏振光、部分線偏振光、橢圓偏振光、部分橢圓偏振光。要想區分自然光、圓偏振光和部分圓偏振光,或區分部分線偏振光、橢圓偏振光、部分橢圓偏振光,只需在檢偏器前面加一塊1/4波片即可,具體方法不再詳述。
測量天體輻射的偏振狀態,能為了解天體的物理狀況、研究天體輻射機制和天體輻射經過的介質特性提供極有用的資料[2],例如:ESO VLT利用FORS1進行的恒星光譜偏振測量,尋找恒星磁場與恒星演化的關系,發現了線偏振與圓偏振之間的串擾[4];ESO VLT用ZIMPOL(Zurich成像偏振計)與自適應光學系統(CHEOPS)組合進行系外行星探測[5];由日冕的偏振測量可以求出日冕內電子密度和溫度分布;觀測塞曼效應產生的偏振用以確定天體磁場;由恒星輻射的偏振資料可以推算星際磁場等。
1 系統綜述
檢偏器控制系統包括控制計算機PC、控制電路箱、電源、步進電機、光電絕對式編碼器、檢偏器機械部分及連接電纜組成。控制計算機通過TCP/IP(RJ45接口)協議、串口(RS485)通信協議分別控制檢偏器的主動部分(步進電機)和從動部分(光電絕對編碼器),前者主要接收PC發過來的控制指令,執行,然后再反饋該指令回PC機,PC機可以通過驗證電機回傳的信息判斷其是否接收并執行了正確的指令;后者可實時反饋當前電機轉動位置(通過編碼器讀數0-1023),上位機根據反饋的信息實時調整步進電機的動作,從而實現閉環控制檢偏器到達指定的角度。該檢偏器安裝在麗江2.4 m望遠鏡的卡焦上,主光路通過檢偏器上的偏振片后進入云南暗弱天體光譜儀(YFOSC),從而使麗江2.4 m望遠鏡具備進行夜天文偏振觀測的能力。世界上很多進行夜天文觀測的大望遠鏡都已經安裝或將要安裝進行恒星偏振觀測的設備[6]。本系統設計方案是屈中權研究員提出的,原理框圖如圖1。
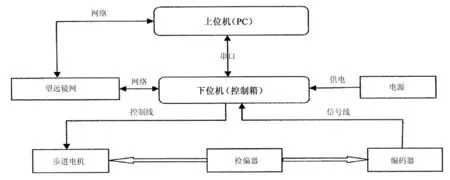
圖1 檢偏器系統原理框圖Fig.1 Illustration of the polarization analyzer system
2 機械部分
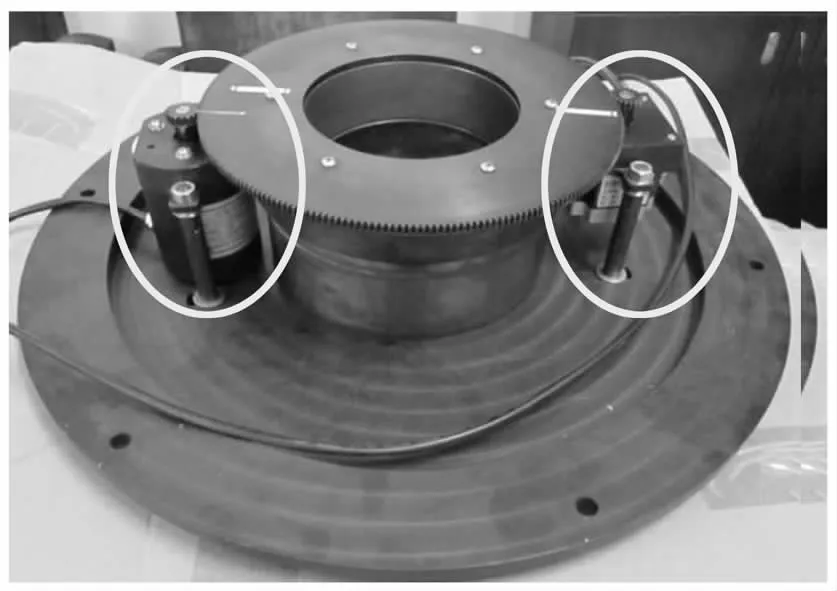
圖2 機械部分(左側:編碼器,右側:步進電機)Fig.2 The mechanical unit(Left-hand side:encoder;Right-hand side:step-motor)
機械部分(圖2)是該系統的最重要的部分。首先要精確測量望遠鏡卡焦接口處的尺寸,要兼顧編碼器、步進電機的尺寸,同時要確保機械齒輪的轉動精度。盡量增大檢偏器轉盤直徑與編碼器轉盤直徑的比值,即增加檢偏器旋轉一周所對應編碼器轉動的圈數,最好能達到滿量程32圈(編碼器最大量程32圈,最大讀數1024)。理想情況下的轉盤分辨率為360°/1024?0.35°,即針對1024個輸出碼數的編碼器而言可以達到的檢偏器轉盤分辨率接近0.35°,當然如果選擇的編碼器輸出碼數越多其精度越高。以上只是基于理論上的討論,由于實際機械加工的精度及難度還有成本等諸多因素考慮,最終設計的檢偏器轉盤直徑與編碼器轉盤直徑的比值約為13∶1,即編碼器旋轉13圈檢偏器正好旋轉一周,分辨率為360°/424=0.85°(最低要求是小于1°),剛好能滿足要求。偏振片就固定在中心圓柱的中間部分,望遠鏡主光路通過檢偏器后進入光譜儀。
3 電控部分
3.1 步進電機控制部分
電機驅動器選用的是ZD-6560-V4高性能步進驅動器,特點如下:高集成度高可靠性;接口采用超高速光耦隔離;抗高頻干擾能力強;最高輸入電壓40 V(峰值);電源反接保護等。主要功能有:整步、二細分、八細分、十六細分可調;輸出電流4檔可調;過熱自動保護;自動半流鎖定;衰減4檔可調;支持脫機、使能、鎖定等功能。電機選用的是二線四相步進電機,步距角1.8°,轉矩0.9 N.m,電流2 A。
電機控制程序在VC6.0環境下開發,通過使用自己編寫的CWSocket類實現TCP/IP協議下的數據傳輸,每條完整的控制指令有12個ASCII代碼數字組成,具體各位代表的意義如下:
(1)轉速控制時:1-功能號;2-板號;3-方向;4-自由位;5-保留;6、7、8、9、10、11-頻率值十萬位至頻率值個位;12-保留。
(2)步進控制時:1-功能號;2-板號;3-方向;4-自由位;5、6、7、8、9、10-步進量十萬位至步進量個位;11-脈沖周期十位;12-脈沖周期個位。
功能號:“0”代表轉速控制;“1”代表步進控制。
板號:代表指令發送給哪個控制板。
自由位:轉速控制時“0”電機處于自由狀態,“1”電機處于鎖定狀態。
方向:“0”順時針旋轉,“1”逆時針旋轉。
脈沖周期十位、個位,步進控制時可以通過改變這兩個參數來改變輸出脈沖頻率,從而調節步進速度,取值范圍01~99,對應的輸出步進脈沖頻率約為30 kHz~460 Hz,電控系統原理圖如圖3。

圖3 電機控制系統原理框圖Fig.3 Block diagram of the step-motor control system
3.2 光電絕對編碼器控制部分
光電絕對編碼器是集光機電技術于一體的數字化傳感器,體積小,驅動扭矩小,碼盤間沒有機械接觸,轉速較高,功耗低,壽命長,精確度高,無重復誤差,特別適合經常運動的場合,可以高精度測量轉角或直線位移。編碼器旋轉時有與其位置一一對應的代碼,當停電或關機后,再開機重新測量時,仍可以準確地讀出停電或關機位置的代碼(即具有停電記憶功能),這也是選擇該編碼器的重要原因。
編碼器主要技術指標如下:
(1)輸出碼數:1024碼;
(2)軸每周輸出/連續圈數:32碼/32圈;
(3)輸出信號:RS485串行通訊信號;
(4)最高機械轉速:1000 rpm;
(5)工作電壓/消耗電流:DC12-24 V/≤50 mA。
RS485串行通信是將編碼器的并行數字信號轉換成串行通訊信號輸出,這種輸出方式一般用于編碼器輸出信號的遠距離傳輸,傳輸距離可達1200 m。這是選擇該編碼器的另一個重要原因,通過一個RS232轉RS485的模塊就可以對編碼器進行遠程讀取數據。
編碼器通信協議:采用MODBUS-RTU(遠程終端單元)模式進行通信。
Modbus協議簡介:ModBus協議定義了一個控制器能認識使用的消息結構,而不管它們是通過何種網絡進行通信的,它制定了消息域的格局和內容的公共格式,描述了一個控制器請求訪問其它設備的過程,回應來自其它設備的請求,以及如何偵測并記錄錯誤信息。通過此協議,控制器相互之間、控制器經由網絡和其它設備之間可以完成信息和數據的交換與傳送,使各種不同的公司和廠家的可編程順序控制器(PLC)、RTU、SCADA系統、DCS或與兼容ModBus協議的第三方設備之間可以連成工業網絡,構建各種復雜的監控系統,有利于系統的維護和擴展,這個通訊協議已廣泛被國內外各行業作為系統集成的一種通用工業標準協議。
該編碼器實現Modbus通信協議時,均作為從機,遵循Modbus通信過程,采用MODBUS-RTU。
協議的命令子集,使用讀寄存器命令(03)和預置寄存器命令(06),每個消息的開頭和結尾至少有3.5字節時間的間隔。
功能碼03:利用Modbus通信協議的03功能碼,讀取設備的數值。
信息幀格式:
(1)從機請求數據格式:從機地址、功能碼、起始地址、數據個數及CRC碼(見表1)。
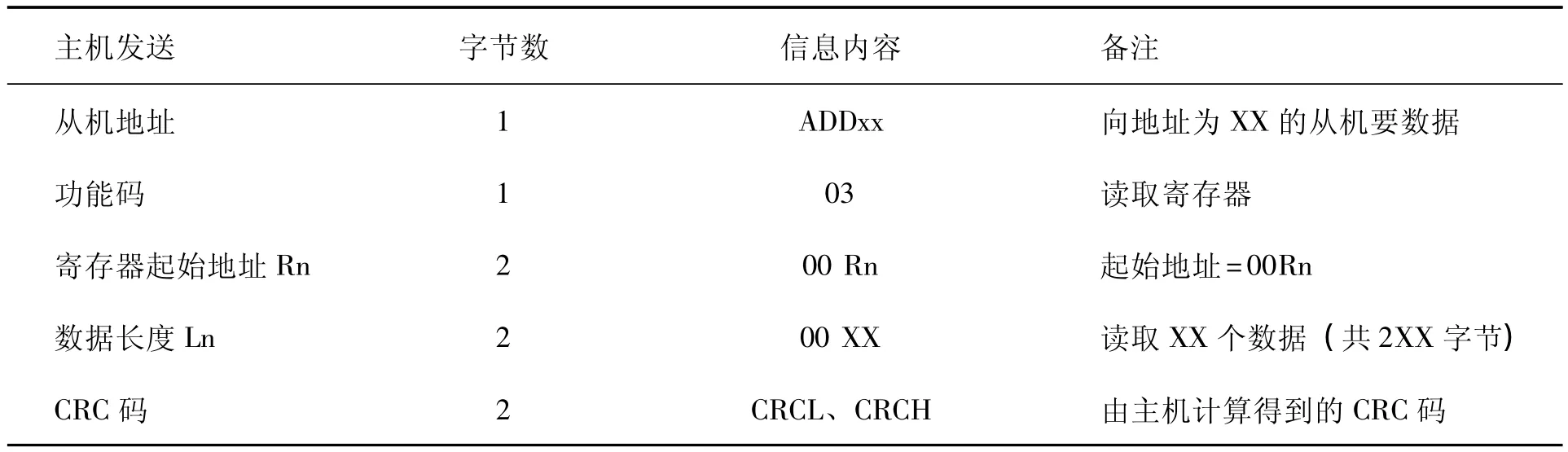
表1 從機請求數據格式Table 1 Data format of the slave request
(2)從機響應數據格式:從機地址、功能碼、字節數、數據區及CRC碼(見表2)。
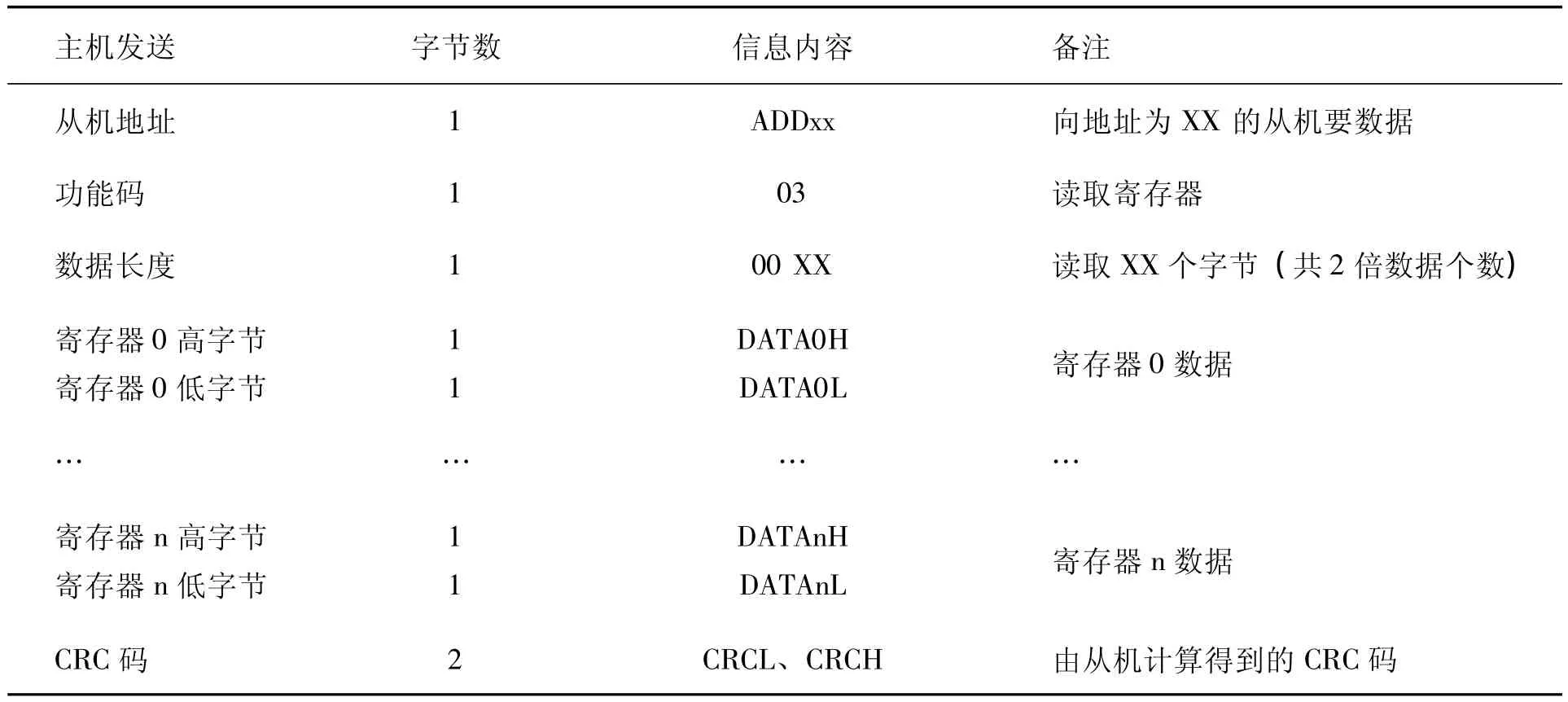
表2 從機響應數據格式Table2 Data format of the slave response
寄存器數據為2字節,高位在前。CRC碼都是2字節,低位在前。
功能碼06:省略(控制軟件中未使用)。
主機在發送數據和接收數據時都需要對數據進行CRC校驗,然后再發送出去或確認接收到了正確的數據,下面就CRC校驗的含義及實現過程做簡要說明。
CRC域是2字節(CRCL、CRCH),包含一個16位的二進制值。它由傳輸設備計算后加入消息中。接收設備重新計算收到消息的CRC,并與接收的CRC域中的值比較,如果兩個值不同,則有誤。具體步驟如下:
(1)預置16位寄存器為十六進制FFFF(即全為1)。稱此寄存器為CRC寄存器;
(2)把第1個8位二進制數據(既通訊信息幀的第1個字節)與16位的CRC寄存器的低8位相異或,把結果放于CRC寄存器;
(3)把CRC寄存器的內容右移1位(朝低位)用0填補最高位,并檢查右移后的移出位;
(4)如果移出位為0:重復第(3)步(再次右移1位);如果最低位為1:CRC寄存器與多項式A001(1010000000000001)進行異或;
(5)重復步驟(3)和(4),直到右移8次,這樣整個8位數據全部進行了處理;
(6)重復步驟(2)到步驟(5),進行通訊信息幀下一個字節的處理;
(7)最后得到的CRC寄存器內容即為CRC碼;
(8)將CRC結果放入信息幀時,將高低位交換,低位在前。
3.3 控制箱部分
前面板包括電源開關、指示燈。后面板包括電源接口、RJ45接口、RS232接口、電機和編碼器控制線接口(航空插頭)。
4 軟件部分
采用C++語言作為軟件設計的編程語言,使用微軟的Microsoft Visual C++6.0作為開發平臺[7-8]。該控制軟件的操作流程如下:
(1)雙擊可執行文件Polarize.exe,打開圖形用戶界面(如圖4)。
(2)點擊“啟動”按鈕,建立TCP/IP通信,串口通信,進行一些必要的初始化。
(3)點擊“初始化”按鈕,將步進電機的位置進行初始化,即轉到0°位置。
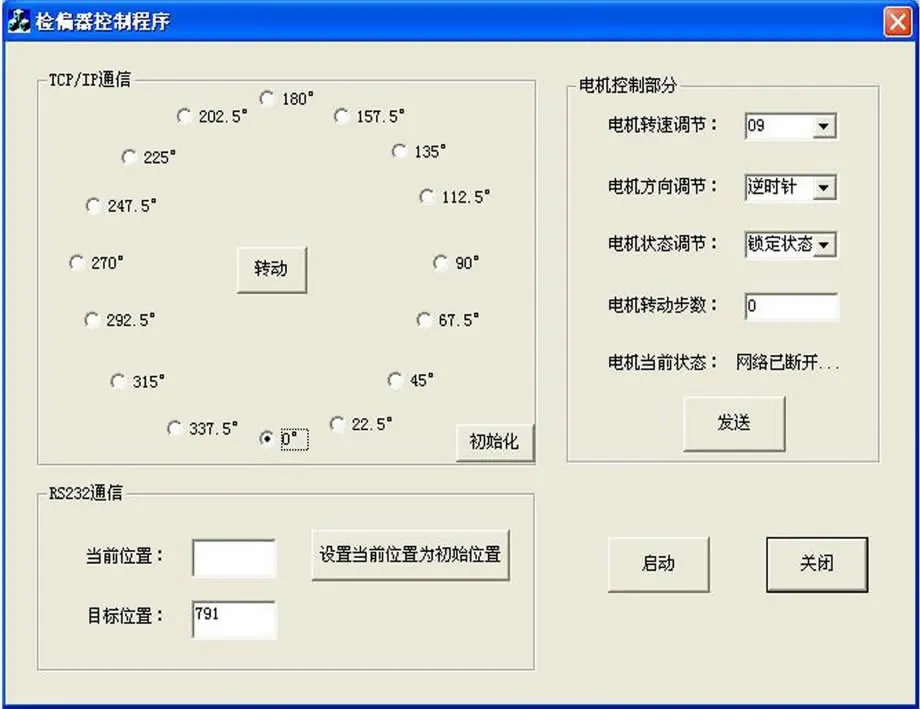
圖4 檢偏器控制圖形用戶界面Fig.4 The GUI of the polarization analyzer system
(4)選擇要轉動的角度,然后點擊“轉動”按鈕即可,此時“目標位置”處的編輯框就會顯示目標處編碼器對應的讀數,而“當前位置”處的編輯框實時顯示當前編碼器的讀數。
(5)要想從任意一個角度回到零點位置,點擊“初始化”按鈕即可。
根據實際情況又添加了如下3部分:
(1)考慮到零點位置可能變動,添加了零點位置重設功能(“設置當前位置為初始值”按鈕),并能將該位置信息實時保存到文本文檔中,下次程序重啟時會自動導入新的零點位置。
(2)另外添加了“電機控制部分”,用戶可以根據實際情況控制步進電機的轉動狀態,轉動步數,當位置未到達指定值時可以手動調節檢偏器的位置。
(3)考慮到轉動齒輪都有間隙,電機在轉動時僅進行一個方向旋轉(逆時針),當然初始化時會順指針旋轉回零點位置。初始化過程要先將電機順時針轉過0°,然后再逆時針轉到0°,從而有效避免齒隙的影響。
5 系統測試
目前該系統僅在實驗室內完成了軟硬件調試,調試的重點放在檢偏器旋轉一周編碼器讀數的變化量上,由于機械誤差,編碼器、步進電機安裝誤差等因素,實際測得的數據與設計數值有出入。
首先需要知道電機轉動多少步之后檢偏器正好轉動一周,試驗方法如下:找一塊很細且顏色鮮艷的紙條,將其切成兩半分別粘貼在轉動的齒輪上和電機軸外的表面上,盡量使二者在同一平面上。然后分多次,每次輸入不同的步進值,控制電機旋轉到二者剛好重合。經過若干次重復實驗就可以找出該步進數,然后使檢偏器轉盤旋轉兩周、三周等,進一步驗證和確定電機步進值與檢偏器旋轉角度的關系。
多次實驗的結果表明當電機(8細分)步進21096步后,檢偏器正好旋轉一周。然后就可以確定檢偏器在旋轉了360°以后編碼器的變化情況了,具體數據見表3。
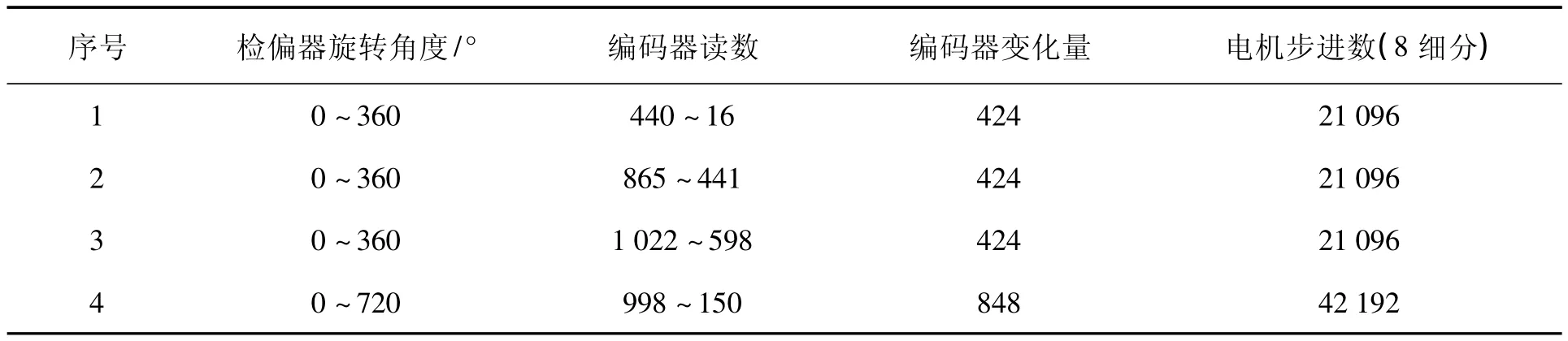
表3 檢偏器旋轉角與編碼器讀數對應關系Table 3 The designed relation between the angle of the polarizer and the output count of encoder
顯而易見,檢偏器旋轉360°對應編碼器讀數變化424,由此得出編碼器變化量為1時對應電機轉動的角度值Δθ:
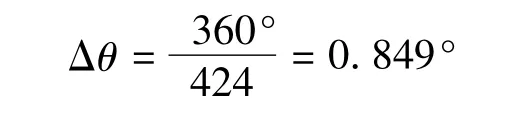
若檢偏器初始位置(0°位置)對應的編碼器讀數為791,根據Δθ就可以確定0~360°范圍內以22.5°為一個步進量的每一個角度值處誤差(如表4)。
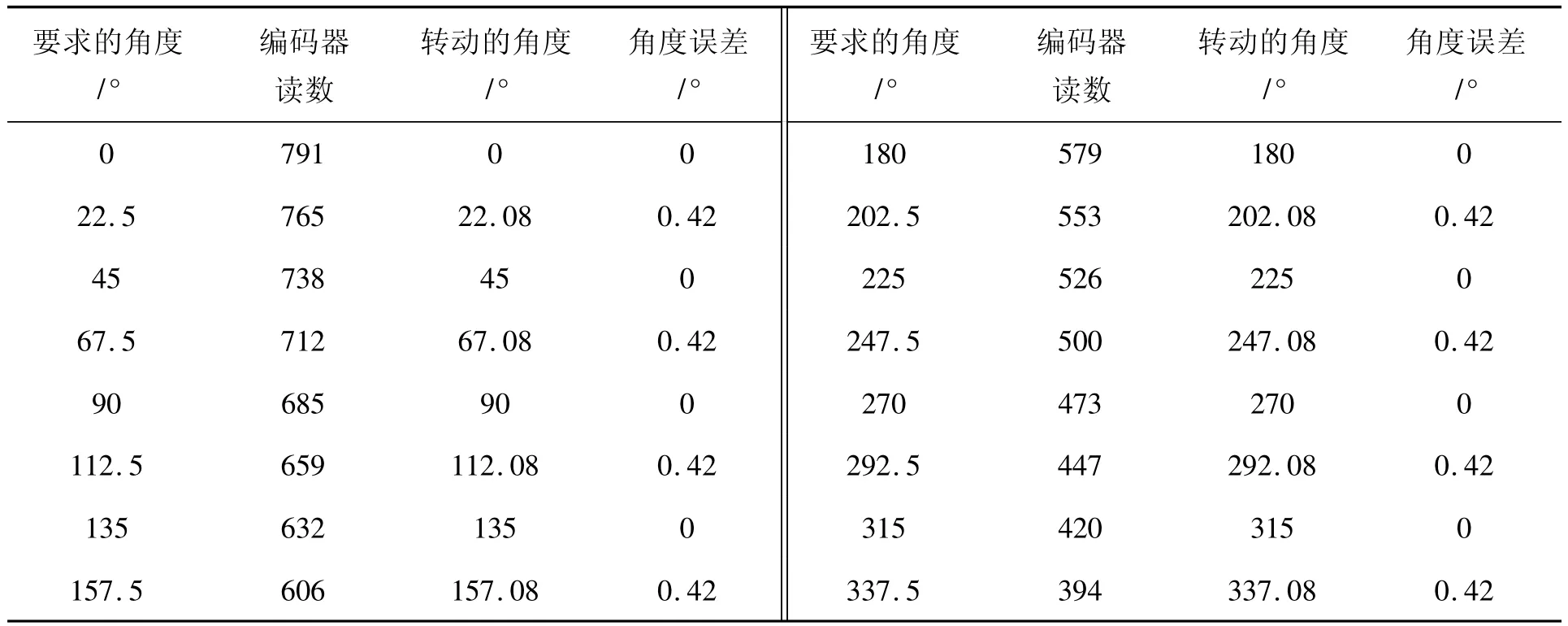
表4 檢偏器旋轉角與編碼器讀數的實測對應關系Table 4 The measured relation between the angle of the polarizer and the output count of encoder
由以上數據可知,當需要轉動的角度是22.5°的偶數倍時,其理論誤差為0,而需要轉動的角度為22.5°的奇數倍時,其理論誤差為0.42°。
6 系統有待改進和完善的地方
(1)目前望遠鏡控制軟件是基于LINUX平臺的,而本系統的控制軟件是基于WINDOWS的,因此給觀測者帶來諸多不便,以后要實現LINUX平臺下的檢偏器系統控制。
(2)機械結構上可以考慮如何與望遠鏡的光譜儀進行無縫對接,從而使檢偏器控制與光譜儀的控制統一起來。
[1]譚徽松.天體物理方法 [M].昆明:云南天文臺南方基地,2008:114.
[2]程福臻.實測天體物理 [M].合肥:中國科學技術大學,2005:95-102.
[3]Z Q Qu,X Y Zh,X K Chen,et al.A Solar Stokes Spectrum Telecope [J].Solar Physics,2001,201(2):241-251.
[4]S Bagnulo,M Sterzik.Measuring Stellar Magnetic Fields with FORS1 at the ESO VLT [C]//Svetlana V Berdyugina,K N Nagendra,Renzo Ramelli.Proceedings of the Conference Held 17-21 September.San Francisco:Astronomical Society of the Pacific,2009:511.
[5]Gisler Daniel,Schmid Hans Martin,Thalmann Christian,et al.CHEOPS/ZIMPOL:a VLT Instrument Study for the Polarimetric Search of Scattered Light from Extrasolar Planets[C]//Alan F M Moorwood,Iye Masanori.Ground-based Instrumentation for Astronomy.Proceedings of the SPIE,2004,5492:463-474.
[6]C Packham,M Escuti,J Ginn,et al.Polarization Gratings:A Novel Polarimetric Component for Astronomical Instruments [J].Publications of the Astronomical Society of the Pacific,2010,122:1471-1482.
[7]Stanley B Lippamn.C++Primer[M].李師賢,譯.北京:人民郵電出版社,2009.
[8]梁偉.Visual C++網絡編程經典案例詳解 [M].北京:清華大學出版社,2010.