四通道比例遙控收發機控制系統的設計
2012-01-15 03:51:26楊小龍
武漢輕工大學學報 2012年1期
楊小龍
(武漢工業學院機械工程學院,湖北武漢430023)
近年來,遙控技術在安全保衛、工業控制以及人們日常生活中應用越來越廣泛。遙控裝置的中心控制部件已從早期的分立元件、集成電路逐步發展到現在的單片微型計算機,智能化程度大大提高。在無線遙控領域,目前常用的遙控方式主要有超聲波遙控、紅外線遙控和無線電遙控等[1]。根據被控對象的不同,選擇不同的遙控方式,可達到節省資源、降低成本的目的。本文介紹一種比例遙控發送與接收系統的設計與實現方法,該方法設計的無線電遙控系統具有結構簡單、制作方便、成本低廉、抗干擾能力強、工作可靠和可實現多通道遙控等優點[2]。
1 系統的組成結構與工作原理
系統組成結構包括發射機和接收機兩部分如圖1所示。通過改變搖桿變阻器滑桿位置,得到連續的偏置電壓U(0—5V),經過A/D轉換,模擬信號電壓U被轉換為8位數字信號,該數字信號經過單片機的串行接口發出,并控制發射模塊以幅度調制的方式發射出去。接收機的接收模塊將收到的信號解調并整形為TTL信號后送至單片機串行口的接收端,單片機經串口收到信息后進行指令分析,然后將指令送至控制端。
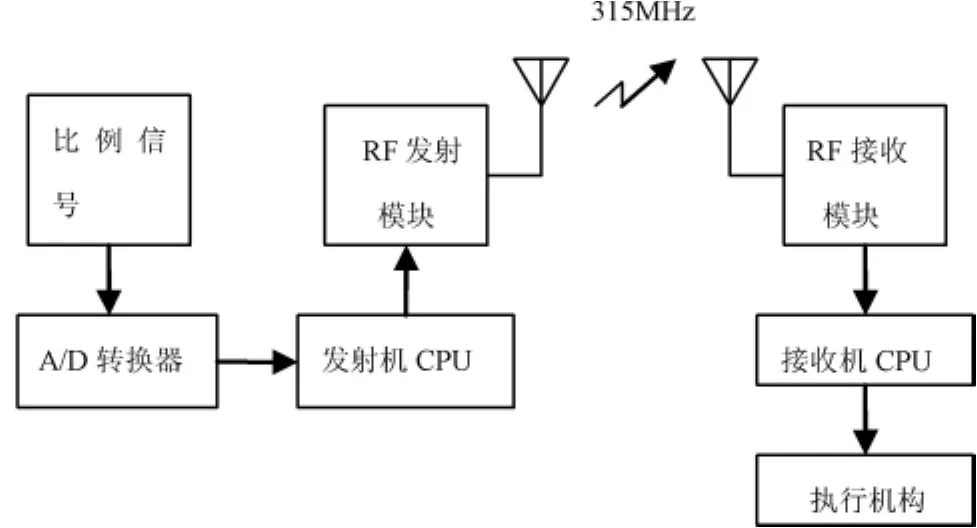
圖1 系統組成方框圖
2 系統硬件電路設計
2.1 比例信號發生電路
比例信號發生電路如圖2所示。TL431及其外圍元件構成+5V的穩壓基準,TL431具有溫漂小、帶負載能力強的特點。搖桿電位器R1—R4、C19—C22組成電路可產生四路變化范圍為0—5V的比例控制信號,由8路A/D轉換器ADC0808轉換為數字信號,并由串口輸出到發射模塊發射。
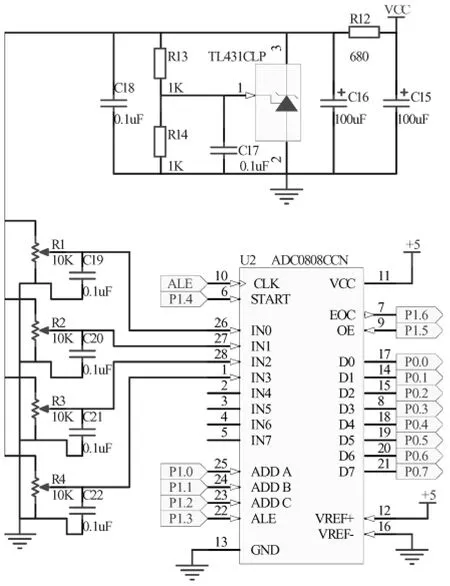
圖2 比例信號發生電路
2.2 無線收發模塊
高頻發射和接收模塊均采用成品,它們的主要技術指標如表1。
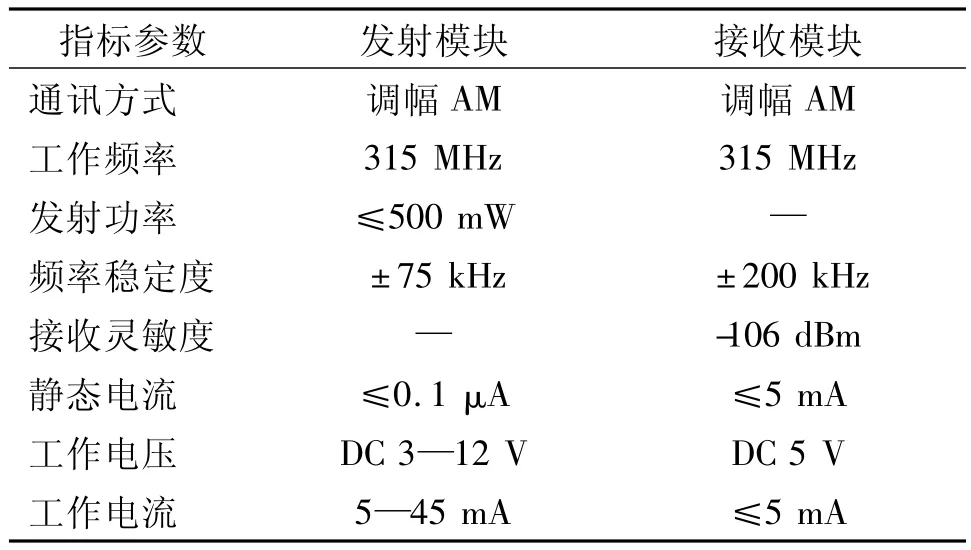
表1 收發模塊主要技術指標
發射頭采用聲表(SAW)振蕩,其頻率誤差很小,一般在±75 kHz以內。正常情況下,發射頭的靜態電流很小,幾乎為零。該發射模塊未設編碼集成電路,而增加了一只數據調制三極管,這種結構使得它可以方便地和其它固定編碼電路、滾動碼電路及單片機接口,而不必考慮編碼電路的工作電壓和輸出幅度信號值的大小。發射模塊具有較寬的工作電壓(3—12 V),當電壓變化時發射頻率基本不變,與之配套的接收模塊無需任何調整就能穩定接收。發射模塊工作電壓與發射距離關系如表2。
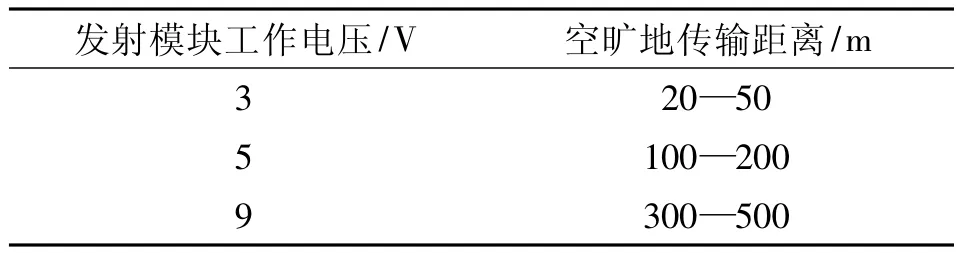
表2 發射模塊工作電壓與發射距離的關系
接收模塊為超再生接收電路如圖3所示,采用LC振蕩,內含放大整形,輸出的數據信號為TTL電平。接收模塊本身不帶解碼集成電路,只有應用在具體電路中進行二次開發才能發揮應有作用,這種電路設計靈活,方便與單片機配合,具有較多優點:
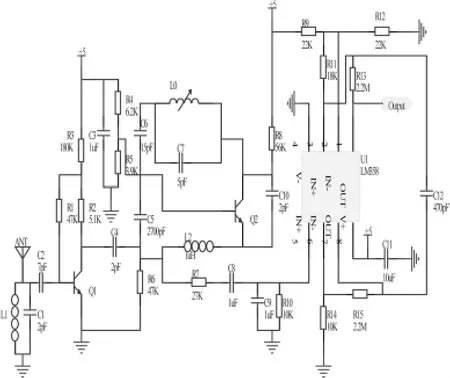
圖3 接收模塊等效電路圖
(1)天線輸入端有選頻電路,而不用依賴1/4波長天線的選頻作用,控制距離較近時可以剪短甚至去掉外接天線。
(2)模塊自身輻射極小,加上電路模塊背面網狀接地銅箔的屏蔽作用,可以減少自身振蕩的泄漏和外界干擾信號的侵入。
(3)采用帶骨架的銅芯電感將頻率調整到315MHz后封固,與采用可調電容調整接收頻率的電路相比,溫度、濕度穩定性及抗機械振動性能都有極大改善。
2.3 直流電機驅動控制電路
直流電機驅動電路如圖4所示。DAC0832將通道IN0數字信號轉換為模擬信號后,送至由運放ua741組成的電壓并聯負反饋電路[4]。ua741輸出電壓U0為
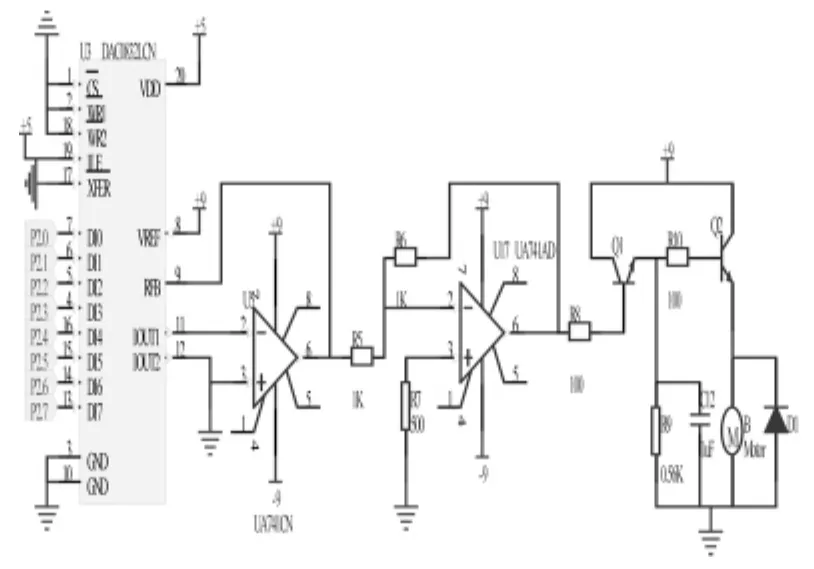
圖4 直流電機驅動控制電路
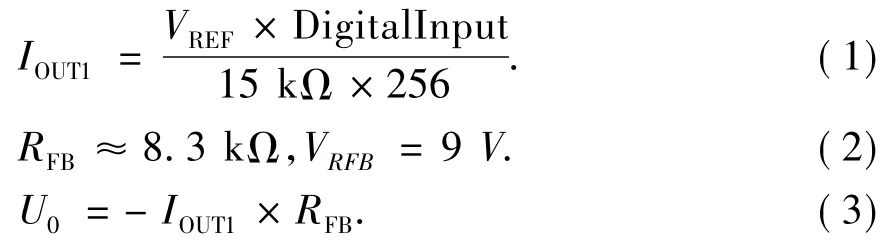
U0的變化范圍約為0—-4.97V,然后U0經過緩沖級—R5、Q1、C7構成的射隨器,通過R6為Q2提供偏置電流,U0越大,偏置電流越大,電機轉速越高。其中數字轉模擬器件DAC0832分辨率為8位,轉換時間1μs,具有兩級鎖存器,該設計中DAC0832處于直通工作方式,即ILE接高電平,和接數字地,DAC0832輸出端可看作恒流源。其余三通道控制信號可以送往比例遙控專用伺服電路,將方波信號轉化為連續可調的電平信號。接收機增設了四個中斷,可設置兩個優先級,根據需要引入中斷來實現特殊功能。為防止航模超出范圍引起事故,可用軟件控制超范圍自動返回功能。當航模超過一段時間(數十ms)沒有收到遙控信號時,進入返回控制程序,有軟件控制輸出端口,使航模返回(如拐彎然后前進)或停止。中斷口可加入一些探測頭的輸出信號,如紅外探頭檢測前方有無障礙物等。
3 系統軟件設計
數據通過單片機的異步串行口進行發送和接收。如圖5所示,發射單片機按通道IN0—IN3的順序,每次采集一個通道的數據由串行口發出,并持續重復此過程。接收單片機響應串行口中斷,接收并校驗收到的數據,分析得到通道的指令信息,并將其送到控制端。
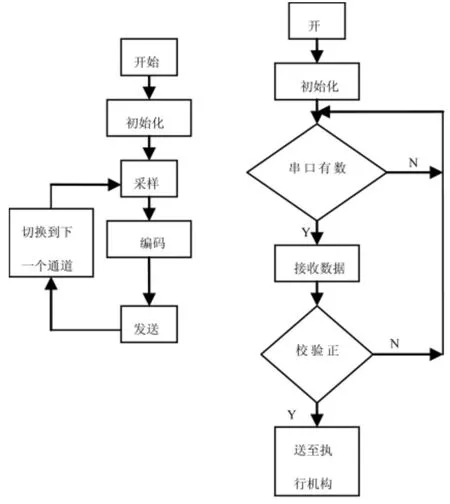
圖5 軟件流程圖
4 結束語
基于單片機AT89S52的四通道比例遙控系統的設計,不僅通信距離遠,而且傳輸速率快,控制實時性好。同時,該系統還具有低成本、小型化、通信可靠等特點。
[1] 肖景和,趙健.無線電遙控組件及其應用電路[M].北京:人民郵電出版社,2004.
[2] 蘇長贊.實用遙控技術手冊[M].北京:人民教育出版社,1996.
[3] 朱寶鎏.模型飛機飛行原理[M].北京:航空工業出版社.2007.
[4] 童詩白,華成英.模擬電子技術基礎[M].北京:高等教育出版社.2001.
[5] 何立民.MCS–51系列單片機應用系統設計[M].北京:北京航空航天大學出版社.1998.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
