斜齒輪副輪齒嚙合剛度變量計算用的參數化的數值模型
2012-01-08 03:38:00HedlundLelical
傳動技術 2012年1期
關鍵詞:模型
J Hedlund A Lelical
1 前言
近代齒輪研究表明齒輪的嚙合剛度和傳動誤差是在齒輪傳動中主要的振動激勵源[1],大多數齒輪動力學模型是利用嚙合剛度或傳動誤差描述齒輪嚙合相互作用的激勵。
齒輪設計中的最常見問題是確定齒輪幾何參數的最佳組合。這些參數應該有可能改進激勵和振動分析的各種各樣效能。齒輪嚙合剛度和傳動誤差的精確預測要求一個有效的數值方法。有限元(FE)方法主要用于計算變形,應力和負載分布[2-12],但是FE方法也可以用來預測參數激勵,即嚙合剛度變量。采用典型FE方法的缺點是其模型不易變化,特別對于精確的幾何生成。此外,為設計目的由于高非線性Hertzian接觸計算時間很可能太長。采用FE方法的優點是可以采用于標準計算無效的那些情況。
為齒輪設計目的FE計算的有效利用,要求其幾何生成必須參數化。此外,振動測量值在正常頻率分析范圍內,所以如果計算模型提供的結果也能在該范圍其優點是明顯的。
本研究介紹了為估算圓柱齒輪參數激勵的一個計算模型,開發該模型只作為實際齒輪副要求的有效的分析和比較,而不需要計算昂貴的模型,該整個激勵模型是參數化的。因此,在時間和頻率范圍內求得嚙合剛度變量。
2 結構變形FE模型
為結構變形分析基于FE方法開發了一種計算模型,該模型開發的數值數據,用參數化幾何模型產生一個單元嚙合建立的,該幾何模型仿真齒輪加工,即滾切過程。該方法基于大量數值計算要點和其同時產生的結果[13,14],它允許與通常的漸開線幾何學差異。該方法的詳細闡述和其精確度問題將在另文中介紹。
該FE方法采用8節點三線六面體單元[15],采用Matlab作為編程工具。在8節點三維單元狀況中,采用Gauss點2*2*2,它在8節點六面體單元中給出可靠的積分[16]。該FE方法包含針對輪齒及其基礎的一個參數化網絡,該網絡在輪齒接觸過程中分別建立的,制作該網絡利用基本的嚙合概念[17],它包含單元和節點編號。該基本嚙合可以利用輪齒齒面幾何學自動擴展超過確定的范圍。用最接近有效座標點找出擴展開拓三維表面幾何矩陣,所以適合任何曲線或不要求插值。
嚙合過程是參數化的僅需要以下數值:單元參量為嚙合寬度,長度,高度和基礎深度方向,此外產生單元嚙合可以用重量因數修正,為精確起見,允許嚙合密度在確定范圍內變化。一輪齒嚙合實例示于圖1。兩小齒輪和大齒輪嚙合可以獨立修正。例如,用一指數方程建立輪齒基礎密度造成嚙合密度正好在輪齒下方,這是變形和應力集中的危險截面。建立的基礎嚙合利用橢圓形確立單元嚙合邊界。采用橢圓半軸作為變數,半橢圓基礎可以改變。橢圓半軸用af和bf表示。
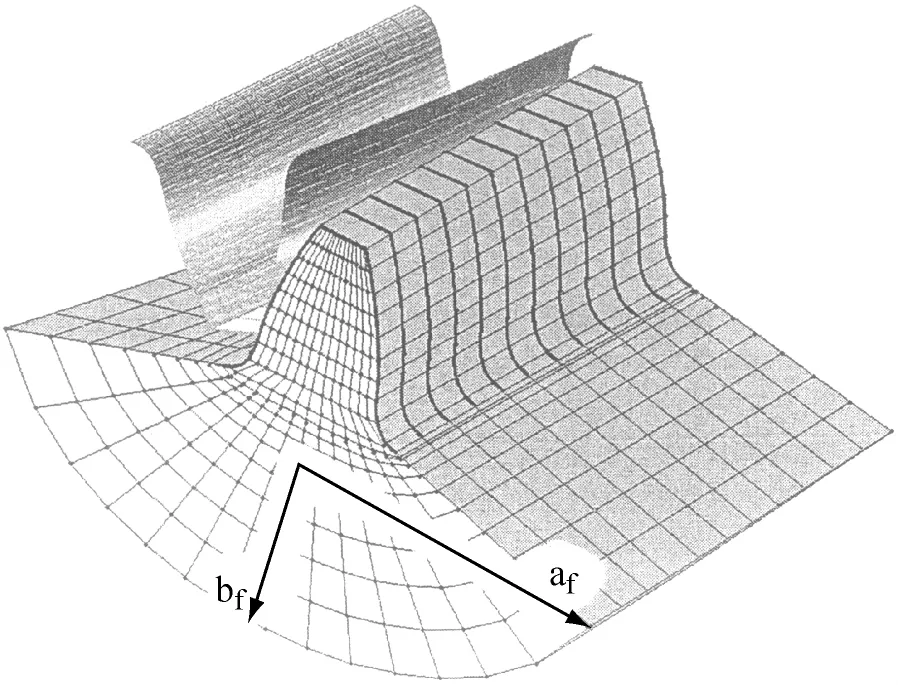
圖1 輪齒嚙合和其基礎的實例Fig.1 Example of the meshing of the tooth and its foundation
主剛度矩陣和主力矩陣采用自由計數器技術進行組合。當量節點負載位于節點,與接觸線位置相對應,它確定于一個未變形狀況。但是如果必要的話,可以采用逐次逼近法在變形狀況確定接觸線。用稀疏矩陣來確定矩陣組合和解,因為矩陣許多項為零。在稀疏矩陣形式內用一個直接的方法求解,并從而求得節點位移和應力。
3 HERTZIAN接觸
漸開線正齒輪輪齒沿嚙合線接觸,其特征模擬作為一恒定變化的滾子接觸,滾子半徑可以按漸開線齒輪幾何學計算。齒輪嚙合循環近似于許多不連續的滾子接觸,其赫茨(Hertzian)參量可采用壓力和接觸區計算。
對于斜齒輪和非漸開線齒輪,其齒面曲率半徑可以用沿嚙合線外接圓半徑法有效確定。該方法可數值計算齒輪接觸幾何參數。用找出給定點(圖2)的外接圓半徑rc來數值確定曲率半徑。對于正齒輪在齒廓方向求得該點,在斜齒輪情況,應在接觸線的法線方向計算該半徑。選擇座標點位置表明實際的赫茨接觸求得精確的接觸半徑。
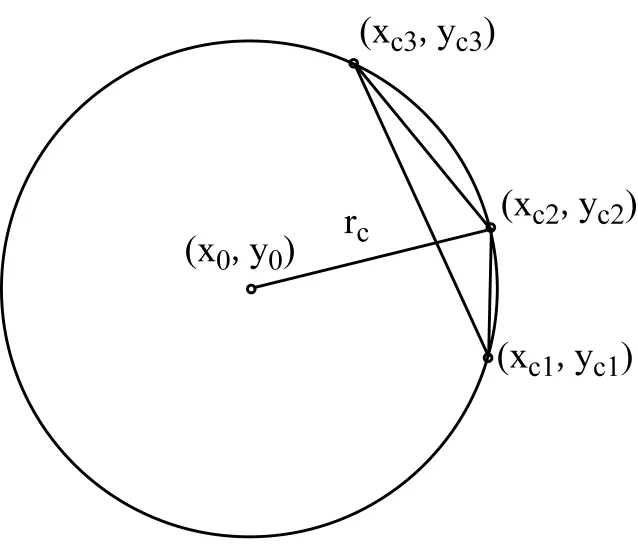
圖2 外接圓和外接圓半徑Fig.2 Circumcircle and Circumradius
如果采用典型的齒冠值,在斜齒輪接觸方面的橢圓率是大的,而簡化的赫茨公式不能包括大的橢圓率,這就意謂必須采用拓寬該公式,如果一簡化的解是一重要的因數,那么應首先近似采用赫茨線接觸公式。
4 嚙合剛度變量
確定的嚙合剛度作為所有嚙合輪齒之間的剛度,本研究利用單對輪齒的剛度值構成嚙合剛度。分別和結合結構剛度用連續彈簧原理計算接觸剛度確定嚙合剛度,在計算的結構剛度中包含輪齒彎曲,剪切和齒根根切等現象。輪齒基礎嚙合尺寸可以改變所述齒輪體剛度,結構剛度值沿齒面法向計算。利用嚙合輪齒對之間的理想接觸線確定當量節點負荷,采用節點位移位于齒面4單元層以下確定結構剛度,這種方法使局部接觸變形對結構剛度計算影響最小。它假定相鄰輪齒的負荷不影響所述輪齒的變形,這是合適的,因為對于正齒輪僅采用一對輪齒可確定其嚙合剛度[18],忽略摩擦力的影響。
必須考慮非線性接觸對參數激勵的影響,采用赫茨理論對橢圓或線接觸或用FE基礎接觸分析可計算接觸剛度值。用適度或少數單元赫茨理論比FE基礎接觸分析更精確,但采用FE方法的優點可考慮邊緣接觸。本文采用赫茨線接觸公式。
采用彈簧連續原理分別計算結構和組合局部接觸剛度值,該原理示于圖3。沿一當量嚙合線在齒面寬度中間(圖4)模擬圓柱齒輪副的嚙合剛度變量,這按照實際嚙合發生在嚙合面[19,20]上。
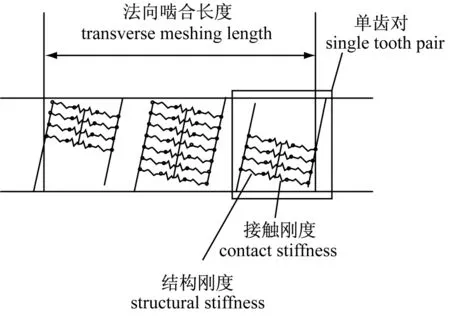
圖3 剛度連續原理Fig.3 Principle of Stiffness in Serier

圖4 斜齒圓柱齒輪當量嚙合線和嚙合面Fig.4 Equivalent line of action and the plane of action for helical cylindrical gears
從而由嚙合開始到結束的總嚙合時間確定為

實例單輪齒對剛度和齒輪副的嚙合剛度示于圖5。沿當量嚙合線研究剛度的變量。描述單齒對剛度矢量用分支表示其他輪齒接觸,假定各輪齒具有相的剛度特性。用各單齒對剛度矢量和得出齒輪副的嚙合剛度矢量。采用總嚙合剛度矢量計算承載準靜態傳動誤差,還可求解沿嚙合線嚙合輪齒間載荷分布。
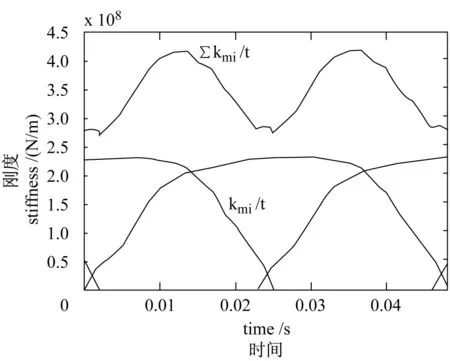
圖5 單輪齒對剛度(Kmi(t))和總剛度(ΣKmi(t))矢量Fig.5 Single Stiffness(Kmi(t))and total stiffness(ΣKmi(t))vectors
4.1 福里哀頻譜
變換嚙合剛度變量為其福里哀級數使它可表示為嚙合剛度激勵在頻率范圍內。它可與齒輪幾何參量對激勵頻率造成的影響作比較。參考文獻[11]介紹了該方法的原理。它還可能使計算結果和實驗結果比較,這是一種典型的操作并表示在頻率范圍內。
采用這種方法形成的剛度激勵的福里哀頻譜如圖6所示,在該圖中,用縱軸表示振幅,該原始標志(嚙合剛度變量)和其福里哀級數近似由上輔線圖可見;其福里哀系數(嚙合頻率和它的諧波)示于下輔線圖。該標志曲線的形狀確定相對高的諧波。
圖7上輔線圖示嚙合剛度變量和對應的福里哀級數,下輔線圖示測量齒輪試驗臺自然頻率特性(實線)和計算嚙合剛度變量(線條)的福里哀頻譜的一個實例,當激勵頻率等于自然頻率時發生共振。由于這個原因,涉及到有關低振動值必需避免激勵與自然頻率之間重合。
在齒輪動力學和齒輪幾何數據的設計中,如螺旋齒輪,可以修正改變嚙合剛度變量的形式,即其尺寸和福里哀系數的定位。而且,自然頻率可以用修正軸和軸承的剛度或齒輪的慣性質量來調整。在這方面,振動性能可以控制而沒有時間消耗響應計算,如圖7所示,在該實例中,已選定齒輪的幾何尺寸,而不存在激勵和自然頻率峰值間的重迭。
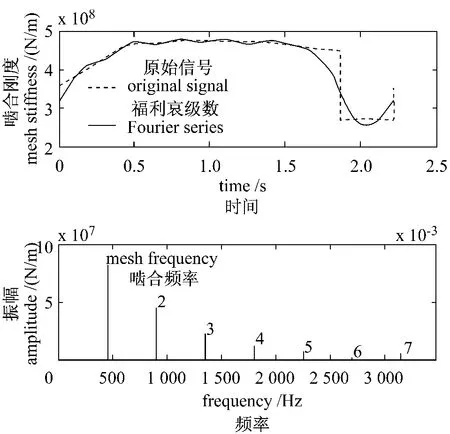
圖6 嚙合剛度變量和相應具有7個福里哀系數的福里哀頻譜的實例Fig.6 Example of mesh stiffness variation and corresponding Fourier Spectrum with Seven Fourier Coefficients
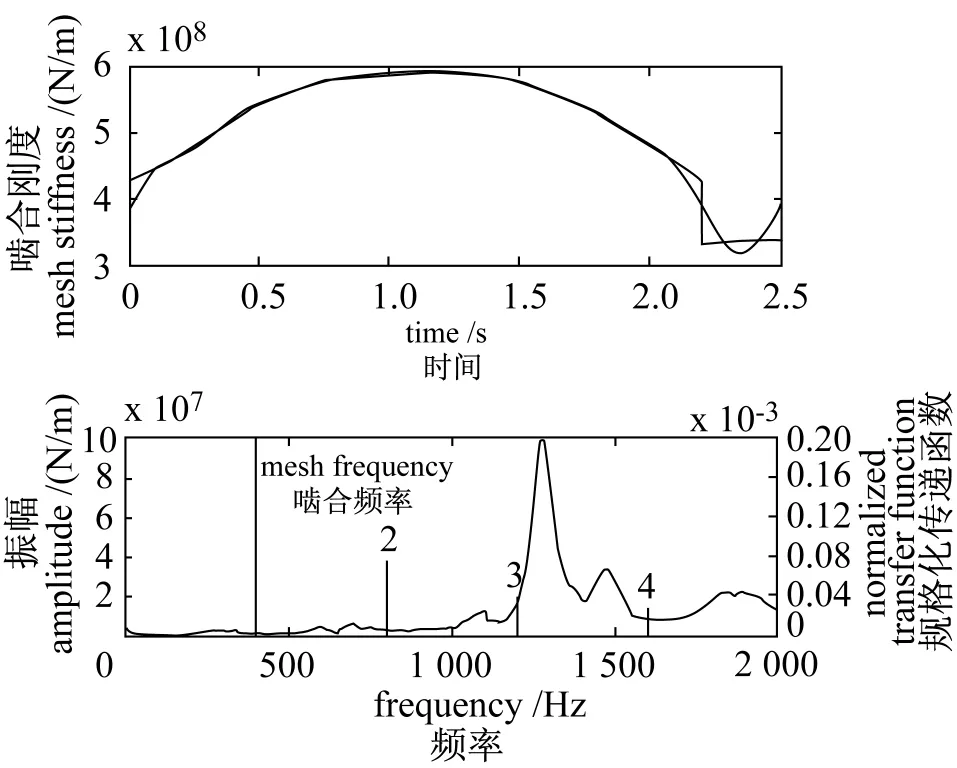
圖7 自然頻率特性相對于激勵頻率分量關系Fig.7 Natural frequency behavior against excitation frequency components
5 作為設計工具的模型趨向
為設計斜齒輪要計算激勵而開發的模型應集中于模型的參量化和合適的計算時間。模型的參量化使模型具有靈活性,為了在某一確實應用中最小的參數激勵,在齒輪設計方面困難是找到齒輪參數的最佳組合。單輪齒對模型限制了幾何偏差分析,特別在由于建立模型在小的齒形偏差的情況,即相鄰輪齒對齒輪體剛度具有一個小的影響。該模型的精度不適于描述微米齒型偏差對嚙合剛度變量的影響。但該模型可估算頂切的修正量,因為它對沿嚙合線的平均變形比對精確的嚙合剛度變化形式更加有關。該模型有可能用來計算彎曲應力。開發這個模型僅作為要求精確的效率分析,比真實的齒輪副不用計算費用昂貴的模型。
整個FE嚙合可用4參量確定,嚙合尺寸對剛度變量有很大的影響,但隨著單元數量的增大結果改進很快。圖8示參量激勵矢量與每齒不同單元數間關系曲線。計算的試驗齒輪副的數據列于表1。采用一個確切少的單元數可以獲得參量激勵的滿意值,即在576和3971單元間嚙合剛度變化不大,這些曲線的特性是一個更低的單元數形成的典型的波形曲線具有大的振幅。

圖8 采用不同每齒單元數的參量激勵Fig.8 Parametric excitation using a different number of elements per tooth
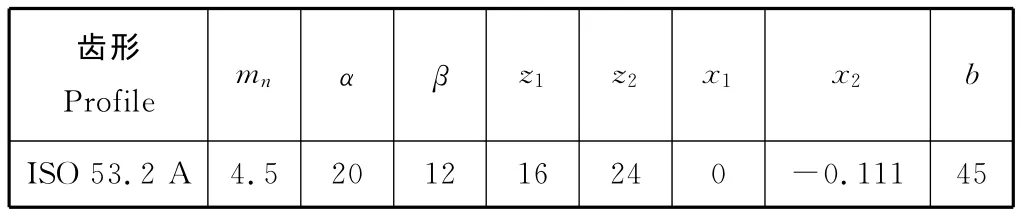
表1 齒輪數據Table1 Gear data
相應于參數激勵的福里哀(Fourier)系數如圖9所示,該圖示采用少數單元可求得福里哀圖譜的合理估算。
僅采用兩個參數可改變輪齒基礎嚙合尺寸,而輪齒嚙合密度可采用加權函數確定。兩小齒輪和大齒輪可以具有不同的單元數和不同的輪齒基礎尺寸。模型的柔性可提供一個有效的方法研究局部接觸剛度和輪齒基礎柔性對參量激勵和負荷分配的影響[13]。
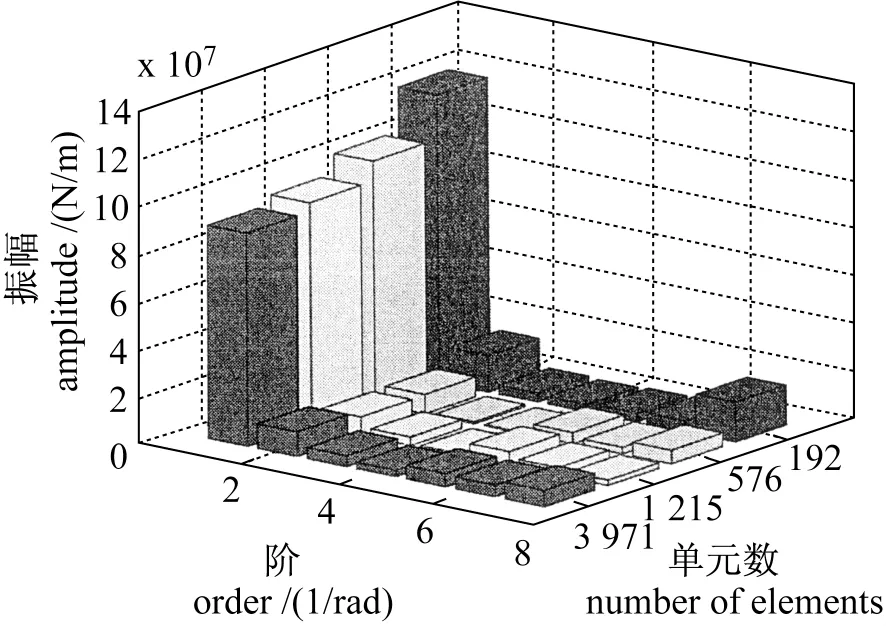
圖9 采用不同單元數的參數激勵的福里哀系數Fig.9 Fourier Coefficients of the parametric excitation using a different number of elements
計算時間很大程度與FE嚙合尺寸有關,齒輪幾何參數的生成還要化費時間去處理,精確描述輪齒齒面幾何學十分多的數據。其他增加計算時間的許多因素是在嚙合線上的許多計算點,結構剛度計算在各嚙合點中只需進行一次,反之,由于非線性赫茨變形總剛度變量常包含多次重復。這種重復處理增加了解題的時間。然而對于合理的精度結果,實際上重復二次三次已經足夠了。由于彈性變形嚙合接觸在嚙合線之外時,該模型還有可能對結構剛度作重復計算,但本方法很費時間,該模型計算時間不是最佳。
采用具有1800MHz處理器和1GB存儲器個人計算機進行計算,各單接觸點具有1000……1500個單元的計算時間約5分鐘,其中包含輪齒幾何自動生成的時間。在嚙合線上的一典型的計算點數為50,計算整個嚙合線上的結構剛度值約4小時。對于赫茨接觸剛度在嚙合線上取50點進行兩次重復計算,第一次為設計目的可能看起來計算時間太長,但可進行粗約單元嚙合進行初始計算,而利用嚙合線上少量計算點以便影響激勵曲線的形狀,以便在選定點進行最后計算。結果兩齒輪對的粗約計算可在1小時內完成。
直接采用FE解法的缺點是它對最大單元數強加一個限制,甚至要采用稀疏矩陣技術。然而這是有點理論觀點,因為實際上用現有模型采用適當的單元數可以求得很好的結果。
6 結論
本文介紹了圓柱齒輪參數激勵分析的一種計算模型,該計算模型利用線性三維FE方法僅針對包括輪齒基礎柔性輪齒結構的變形計算。本模型為避免大的FE網格綜合了接觸分析和結構分析,找出赫茨公式去快速和有效地處理輪齒非線性接觸。整個激勵模型參數化,包括建立輪齒的FE網格。采用4參數確定整個FE網格,僅采用2參數可改變輪齒的基礎尺寸,采用加權函數可確定輪齒網格密度。因而,在時間和頻率范圍內可求出嚙合剛度變量(即參數激勵)。在頻率范圍內正常分析振動測量值,所以當在該范圍內計算模型提供結果時是它的明顯優點。
本文為設計目的還研究和討論了模型的趨向,計算表明很少的單元數能滿足對嚙合剛度變量的估算,在齒輪動力學的設計中,可修正齒輪幾何數據來有效地改變激勵的形式。這樣可以在激勵和自然頻率間進行比較,也可作應力和負荷分布的分析,使設計趨向和計算時間達到合理的組合。(介眉譯自proc.Imeche Vol.222partc:J.Mechanical Engineering Science)
References
[1] Blankenship,G.W.and Singh,R.A comparative study of selected gear mesh interface dynamic models.In Proceedings of the International Power Transmission and Gearing Conference,13-16September 1992,ASME vol.1,pp.137-146.
[2] Wilcox L.and Coleman,W.Application of finite elements to the analysis of gear tooth stresses.J.Eng.Ind.,1973,95,1139-1148.
[3] Wallace,D.B.and Seireg,A.Computer simulation of dynamic stress,deformation,and fracture of gear teeth.J.Eng.Ind.,1973,95,1108-1115.
[4] Wang,K.L.and Cheng,H.S.A numerical solution to the dynamic load,film thickness,and surface temperatures in spur gears,part I analysis.J.Mech.Des.,1981,103,177-187.
[5] Wang,K.L.and Cheng,H.S.A numerical solution to the dynamic load,film thickness,and surface temperatures in spur gears,part II results.J.Mech.Des.,1981,103,188-194.
[6] Coy,J.J.and Chao,C.H.-C.A method of selecting grid size to account for Hertz deformation in finite element analysis of spur gears.J.Mech.Des.,1982,104,759-766.
[7] von Eiff,H.,Hirschmann,K.H.,and Lechner,G.Influence of gear tooth geometry on tooth stress of external and internal gears.J.Mech.Des.,1990,112,575-583.
[8] Vedmar,L.On the design of external involute helical gears,transactions of machine elements division.Doctoral Dissertation,Lund Technical University,Lund,Sweden,1981,p.100.
[9] Rao,C.R.M.and Muthuveerappan,G.Finite element modelling and stress analysis of helical gear teeth.Comput.Struct.,1993,49(6),1095-1106.
[10] Steward,J.H.The compliance of solid,wide-faced spur gears.J.Mech.Des.,1990,112,590-595.
[11] Weck,M.and Mauer,G.Optimum tooth flank corresctions for helical gears.Trans.ASME,J.Mech.Des.,1990,112,584-589.
[12] Litvin,F.L.,Chen,J.-S.,Lu,J.,and Handschuh,R.F.Application of finite element analysis for determination of load share,real contact ratio,precision of motion,and stress analysis.J.Mech.Des.,1996,118,561-567.
[13] Hedlund,J.and Lehtovaara,A.Modeling of helical gear contact with tooth deflection.Tribol.Int.,2007,40,613-619.
[14] Hedlund,J.A numerical model and testing method for the evaluation of parametric excitation of cylindrical gears with shafts and bearings.Dissertation,Tampere University of Technology,Tampere,2006.
[15] Weaver,W.Jr.and Johnston,P.R.Finite elements for structural analysis,1984(Prentice-Hall,Inc.,Englewood Cliffs,NJ 07632).
[16] Bathe,K.-J.Finite element procedures in engineering analysis,1982(Prentice-Hall,Inc.,Englewood Cliffs,NJ 07632).
[17] Nathan,M.K.,Prasanna,S.,and Muthuveerappan,G.Three-dimensional mesh generation using principles of finite element method.Adv.Eng.Softw.,2000,31,25-34.
[18] Wang,J.and Howard,I.The torsional stiffness of involute spur gears.J.Mech.Eng.Sci.,2004,218,131-142.
[19] Umezawa,K.,Suzuki,T.,and Sato,T.Vibration of power transmission helical gears(approximate equation of tooth stiffness).Bull.ISME,1986,29(251),1605-1611.
[20] Cai,Y.Simulation on the rotational vibration of helical gears in consideration of the tooth separation phenomenon(a new stiffness function of helical involute tooth pair).Trans.ASME,J.Mech.Des.,1995,117,460-469.
附錄
APPENDIX
名詞
Notation
af基礎齒面寬度橢圓半軸 ellipses semi-axis for foundation
b 齒面寬度 tooth facewidth
bf基礎橢圓半軸 ellipses semi axis for foundation
kmi第i嚙合齒對的嚙合剛度 mesh stiffness of the i the meshing tooth pair
mn法面模數 normal module
nrpm小齒輪轉速 rotational speed on pinion
rc圓半徑 circumradius
t 時間 time
tm總-嚙合時間 total meshing time
tz通過一法向基節的嚙合時間 meshing time period passing a transverse base pitch
x0,y0圓心座標 circumcentre coordinates
x1,x2齒頂修正系數(表1) addendum modification coefficients(Table1 )
xci,yci圓心座標 circumcircle coordinates
z1小齒輪齒數 pinion tooth number
z1,z2齒數(表1) tooth number(Table1 )
α 壓力角 pressure angle
β 螺旋角 helix angle
εα法向接觸比 transverse contact ratio
εβ重合度 overlapratio
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
