應用航測技術的電力線路工程勘測及精度評定研究
2012-01-01 00:00:00賈鳳海鄧國榮
科技資訊 2012年1期
GPS技術以其可在全球范圍內實現全天候、聯系、實時的三維導航、定位、測時、測速的特點,在測量領域得到廣泛應用,其相對定位的定位方式發展迅速,從最先的碼相對定位到現在的RTK,使GPS定位精度不斷提高,而絕對定位即單點定位發展相對緩慢。美國噴氣推進實驗室(JPL)的Zumberge提出了精密單點定位技術(Precise Point Positioning,PPP)技術,只要給定衛星的軌道和精密鐘差,采用精密的觀測模型,就可以計算出接收機的精確位置。目前國際GPS服務組織(IGS)能夠提供衛星的精密軌道和鐘差,衛星軌道的精度能達到2cm~3cm,衛星鐘差的精度優于0.02ns。
隨著GPS技術的發展,集成了高精度慣性導航定向系統和全球衛星定位系統的數碼航攝系統逐漸出現,其中最具代表性的是推掃式航空傳感器ADS系統,可無需進行外業控制測量就可以直接進行加密和測圖,不僅大大減少外業控制測量工作及成本,更可以提高工作效率,縮短成圖周期。國內對ADS40傳感器的各類試驗也早已在測繪系統中展開,但多側重于區域網模式,而在國內,諸如輸電線路一類的帶狀工程中的應用較少。本文結合工程,對基于精密單點定位的ADS40航測技術在線路勘測工程中的應用、精度和誤差情況做了一些深入研究。
1 ADS40航攝儀概述
ADS40數碼航攝儀是由瑞士的LH公司和德國宇航中心DLR聯合研制的,是基于線陣CCD技術的,集成了GPS接收機和慣性測量裝置(IMU)的新型攝影測量儀器。ADS4411324af581d5469651608875c9cc8fd718db63b46f32a5b9d0dd916009b98c60傳感器為推掃式數字傳感器,由傳感器頭、控制單元、大容量存儲系統、操作界面、導航界面及陀螺穩定平臺等組成。
SH40(sensor Head)中集成高性能鏡頭系統和慣性測量裝置IMU,鏡頭焦平面上安置7條波段CCD陣列探測器,可以生成黑白、彩色及彩紅外影像。3條全色CCD線每條是2×120000個像素,4條多光譜CCD線,每條是12000個像素,像素大小6.5mm,視場角為64°,焦距62.77mm,3條全色CCD角度分為14°/28°/42°。
ADS40航攝系統使用POS技術,以線陣CCD推掃的方式獲取地面的數字影像,并以WGS-84坐標系統為數學基礎,所獲取的影像需要在多種坐標系中進行處理和轉換。
2 試驗實施及精度分析
ADS40推掃式數字航攝儀和傳統框幅式相機的布點方案完全不同。本次試驗利用揚州至鹽城輸電線路工程,主要研究了GPS精密單點定位技術下無基站的數據處理、像控布設方案及數據精度情況。該工程地形復雜,絕對航高2700m,GSD為0.25m。共實施有效航飛8條航帶,航飛長度約60公里,線路路徑基本成南北走向,飛行時未架設基站。
2.1外業控制測量
坐標基準:平面采用1954北京坐標系,中央子午線105度,高程采用1956黃海高程系。共聯測了3個國家已知點,測設8個控制基準點,約50個像控點,用于空三加密和精度檢測。
2.2坐標系的轉換(包括平面和高程)
電力線路工程應用一般是基于克拉索夫斯基橢球的1954北京坐標系或1980西安坐標系。而ADS40系統獲取的坐標信息主要是WGS84基準的數據,本試驗測線長60km,區域較小,因此坐標轉換采用Bursa七參數轉換法,精度滿足工程要求。
2.3內業數據處理和精度檢測
(1)數據處理。
由于本工程未架設基準站,因此事后收集IGS提供的精密星歷數據,采用PPP技術在WGS 84基準下,進行GPS數據處理、GPS/IMU數據的融合和空三加密處理(LPS工作站處理)。
(2)內符合精度情況。
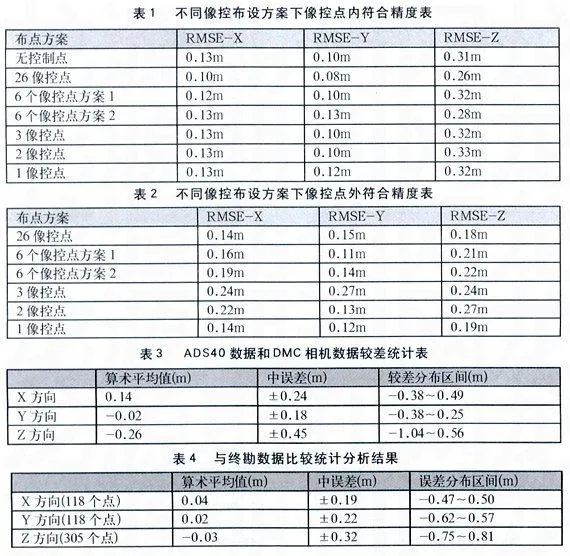
試驗按照無控、26、6、3、2、1點不同像控點個數約束進行解算,其內符合精度見表1所示。
(3)外符合精度情況。
由上面不同像控點個數約束下進行空三解算后,使用七參數轉換的方法,在1954北京坐標系下進行立體量測統計出的精度情況,平面檢測點45個,高程檢測點50個。(如表2)
表2中不同方案的外符合精度略有差別,但差別不大,平面中誤差在0.2m左右,不超過1個像素,高程中誤差不超過2個像素。其中26個像控點參與解算的高程精度相對最好。6點布設方案1的平面精度好于6點布設方案2。由表2還可以看出,1個像控點約束下的平面中誤差精度量好。這一結果體現了ADS40數據模型的剛性特征。為了保證工程數據的可靠性,根據工程長度和分布情況,不超過60km時建議使用六個點進行約束,即能滿足電力線路工程勘測要求。線路長度較長時,可根據情況分段使用七參數處理。
試驗結果說明,像控點的布設,對高程有一定的約束,對平面精度影響不大。
2.4ADS40數據和DMC相機數據精度比較
該工程的ADS40數據中的局部地方,有同時期的DMC航攝儀空三成果數據,選取重合區域,從ADS40數據立體模型中均勻找出了34個明顯特征點,同時在DMC數據中立體觀測其三維坐標,進行比較分析,較差結果如表3所示。
2.5利用外業終勘數據進行精度分析
沿全線50公里線路方向,選取外業終勘數據平面特征點108點(清晰、無數遮擋、便于立體觀測),高程特征點304個。在ADS40立體模型下測量其三維坐標,統計結果如表4所示。
經過統計分析,高程誤差的概率分別為:P(-σ≤△≤σ)=77%,P(-2σ≤△≤2σ)=97%,P(-3σ≤△≤3σ)=100%。由誤差統計及概率論可知,高程誤差分布符合正態分布。
3 誤差分析
3.1系統誤差
(1)硬件系統帶來的誤差。
IMU軸線偏差,GPS、IMU的偏心分量,GPS和IMU運行狀態(如IMU的系統漂移)等的影響所帶來的誤差,主要為系統誤差。
(2)使用七參數坐標轉換時帶來的系統誤差。
像控點的精度會影響空三加密質量,帶來系統誤差。另外,后期成圖時使用1954北京坐標系坐標主要基于七參數轉換,因此七參數質量的好壞直接影響最終數據精度和質量。
3.2偶然誤差
飛行時受到不明氣流的影響,導致姿態不穩,產生漂移。對于ADS40推掃式相機來說,飛行狀態的不穩定對數據獲取影響較大。
3.3其它誤差
(1)人工量測像控點和檢測點時帶來的不確定誤差。內業像控點量測是基于L0級影像,無法在立體下觀測刺點。因此L0級影像下的像控點轉刺主要依靠人工經驗,受人為因素影響較大。(2)INS(慣性導航系統)精度、狀態等因素帶來的系統誤差外的其它誤差。
4 結語
單點定位技術的應用可以在無基站的作業模式下最大限度地減少野外工作,同時縮短工期,節約成本。ADS40航空攝影系統集成了POS技術,采用單一的鏡頭獲取完整影像,從不同視角進行攝影,重疊度高,空三結果可靠,精度滿足工程需求。這幾項技術的綜合使用,配合高效計算機處理,將可以大大提高4D產品的生產周期和工作效率,也將成為我國測繪行業新的主要作業模