基于預測控制的變風量空調送風系統控制特性研究
2011-12-27 08:15:54邱國永何大四范曉偉
中原工學院學報 2011年1期
關鍵詞:系統
邱國永,何大四,范曉偉
(中原工學院,鄭州 450007)
基于預測控制的變風量空調送風系統控制特性研究
邱國永,何大四,范曉偉
(中原工學院,鄭州 450007)
基于通風網絡原理建立了變風量空調送風系統的預測控制模型,并對變風量空調送風系統進行預測控制.仿真模擬表明,該預測控制模型對變風量空調送風系統的調節及時、準確,能使該系統更加節能、可靠.
變風量空調送風系統;通風網絡;模型預測控制
在傳統的變風量空調送風控制系統中,各個控制環節間相互影響,存在著嚴重的耦合[1],而各個環節的控制又是獨立的,很容易造成各個控制環節的盲目運行,使系統不穩定[2].目前,變風量系統的控制解耦研究很少關注送風系統對系統穩定性的影響,而通風網絡技術的應用則局限于通風領域[3],很少涉及變風量空調系統的設計及運行方案擬定.本文提出的基于通風網絡技術的預測控制模型,實現了對送風系統結構參數的調整和風機運行的預測控制,使各控制環節協調運行,增強了控制系統的可靠性;利用風管風閥承擔部分末端的局部阻力變化,防止末端風門開度較大時引起阻力劇烈變化,從而增強送風系統結構的穩定性.
1 預測模型的建立
首先對變風量空調送風系統的預測控制模型的建立過程進行分析.其基本過程是:首先,進行通風網絡解算,預測送風系統各個調節部件的調節參數,為各控制環節的協調控制提供指導;其次,根據通風網絡解算結果,對送風系統的結構進行改造,保證其處于穩定、節能狀態.
圖1所示為一變風量空調送風系統.將該送風系統圖作簡化處理,如圖2所示.為便于利用通風網絡理論建立預測控制模型,將圖2進一步簡化,如圖3所示.
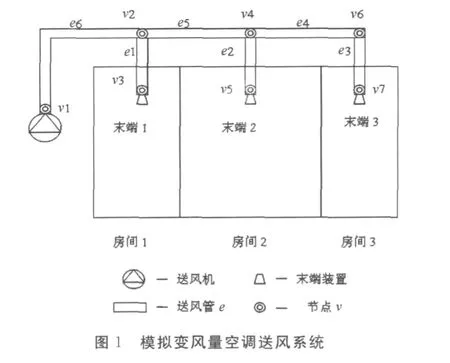
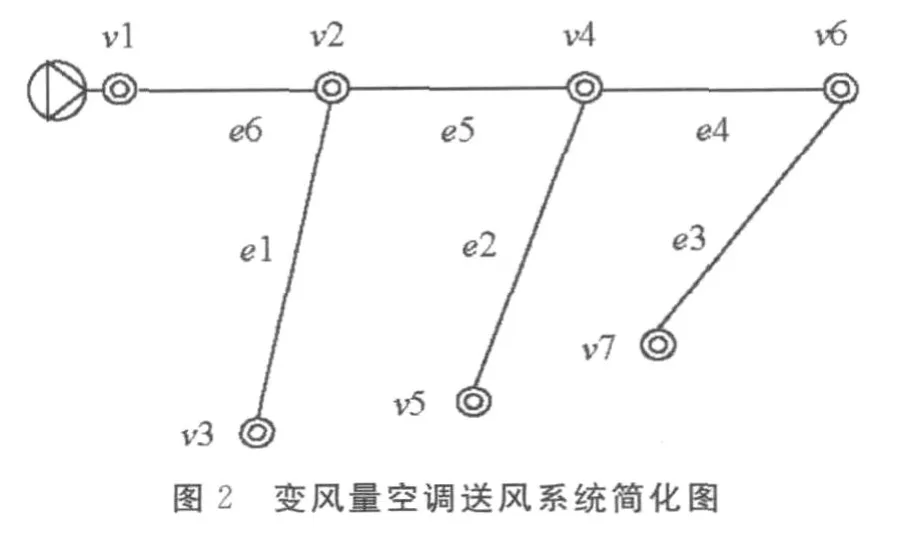
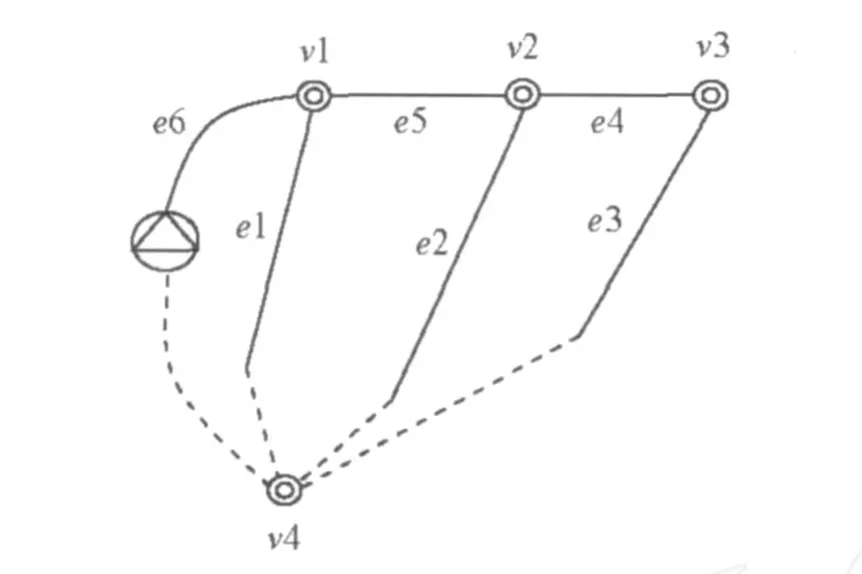
圖3 變風量空調送風系統網絡圖
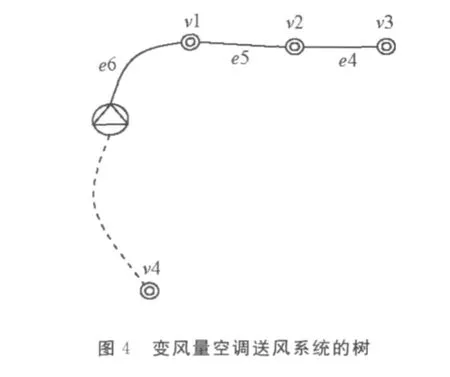
對圖3進行分析.該通風網絡有4個節點,6條風路.圖4所示是該通風絡網的樹狀圖,其樹枝為e6、e5、e4.基本回路如圖5所示.

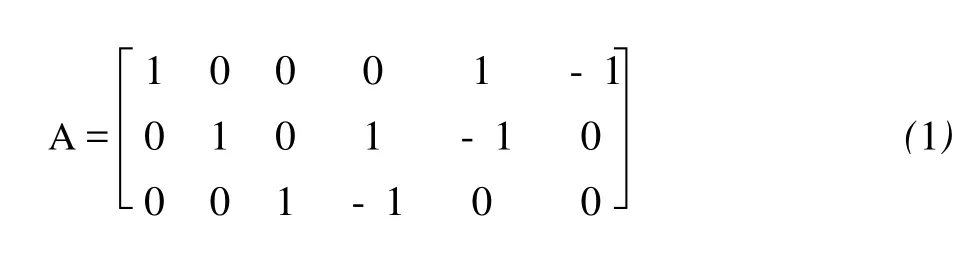
去掉節點v4,建立相應的基本關聯矩陣A:
各節點的風量矩陣Q為:

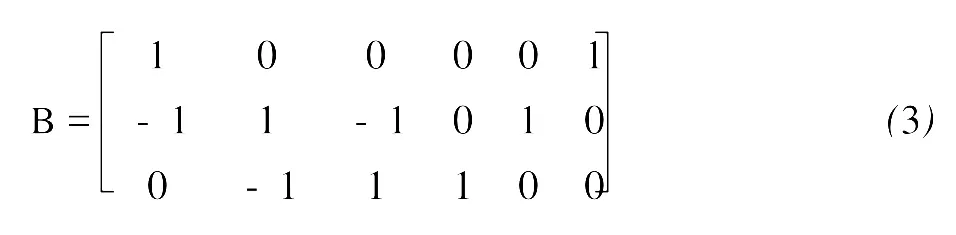
其基本回路矩陣B為:
各風路的風壓矩陣 P為:

因此,風量平衡方程為:
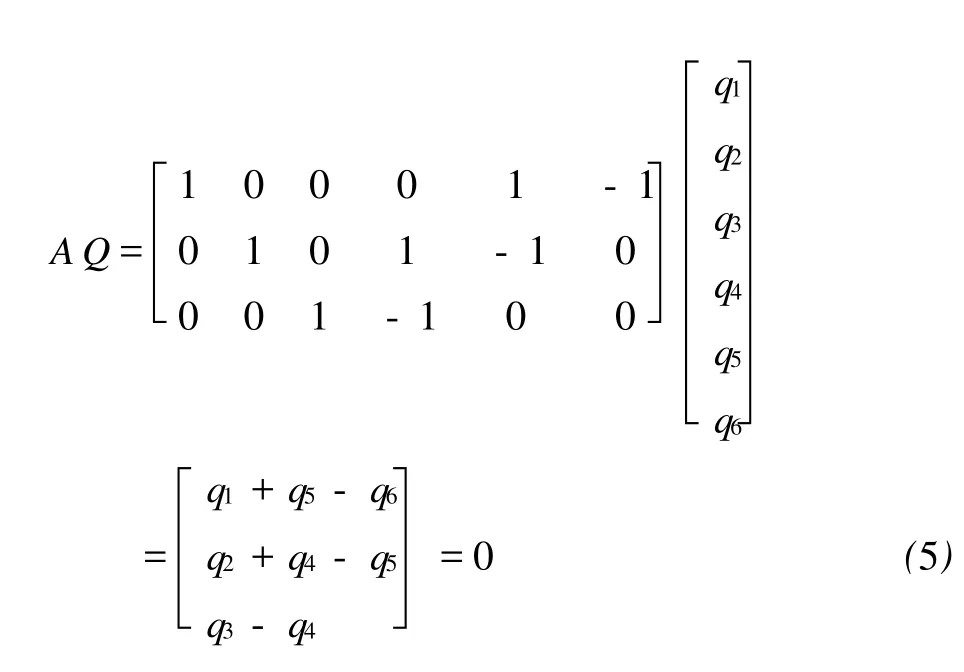
根據變風量空調送風系統的特點,該送風系統可視為常流風網.根據通風網絡原理,將各個房間分支作為連枝風路e1、e2、e3,其風量q1、q2、q3已知,通過式(5),送風系統中其他分支的風量都可以計算出來.
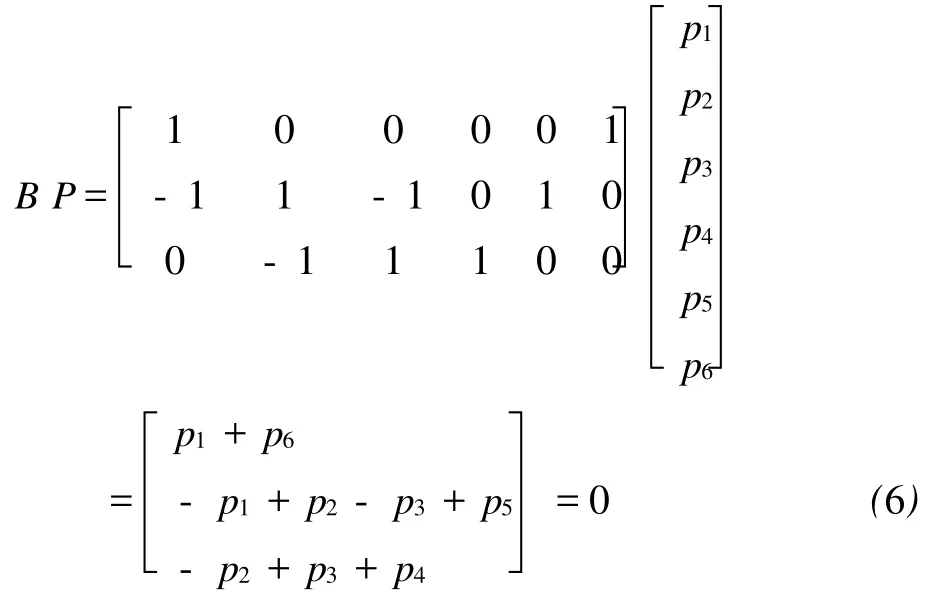
由風壓平衡定律可知:
支路特性方程為:
將方程(5)與方程(7)聯立,并帶入方程(6),可得方程(8):
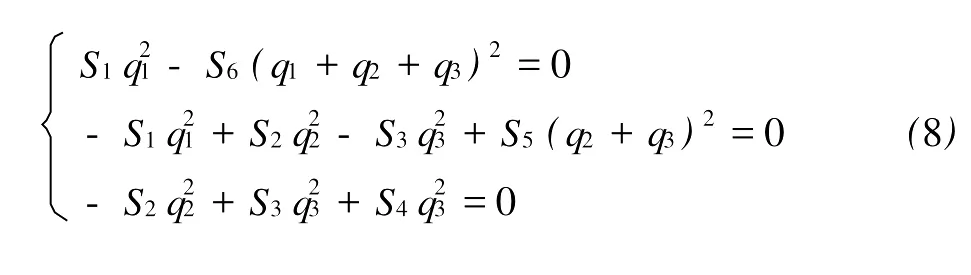
在變風量空調送風系統中,各個區域的風量都需要控制在一定的范圍之內,這需要通過調節送風系統中有關調節部件的阻力系數來實現.送風系統中各調節部件的阻力系數應滿足式(8),式(8)中存在6個未知系數,為使方程封閉,需進一步附加條件.根據減少主干風管的阻力可以使末端風量控制回路的耦合程度減到很小的原理[4],在預測控制過程中,若出現需要增大主干風管阻力的情況時,則將需要增大的阻力由送風系統的各個房間的分支風管來承擔,防止主干風管阻力增大;對于圖1所示的變風量空調送風系統而言,即在調節過程中主干風路e4、e5、e6調節部件的阻力系數S4、S5、S6不變. 則式(8)中 3 個未知數S1、S2、S3可計算出來.
通過預測模型可以將通風網絡中各風路的狀態(壓力、風量)以及各調節部件的參數(閥位、局部阻力系數)確定下來,并以前饋的形式作用于送風系統的各個控制環節之中,從而保證各控制環節的協調性.
2 系統仿真及其控制性能分析
2.1 仿真對象及條件
以鄭州地區某辦公樓二樓為對象進行仿真試驗,該二樓分為三區,如圖6所示.
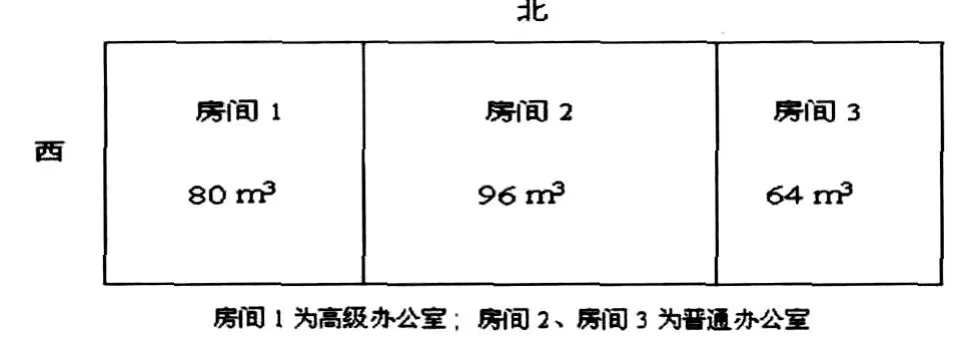
圖6 仿真建筑
以TRNSYS軟件為平臺建立變風量空調送風系統仿真模型,其控制原理如圖7所示.運行參數為:風機的轉速初值為120 r/min,調節步長為0.000 55,末端控制器的動作上下限為需求風量的±15%,調節步長為0.015,末端風門開度初值為0,仿真時間步長為1 min.
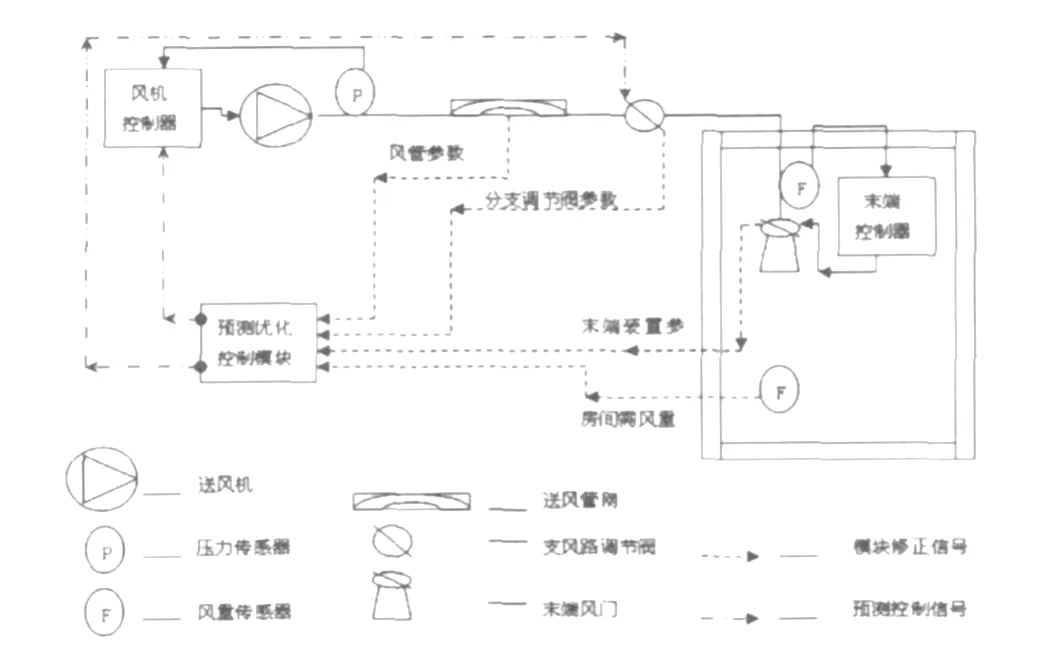
圖7 變風量空調送風系統控制原理圖
2.2 變風量送風控制系統性能試驗
本試驗以風量的階躍變化作為性能測試條件.試驗方案為:房間1的風量信號保持0.1 kg/s不變,房間2的風量信號保持0.2 kg/s不變,房間3的風量信號在第3 h時由0.3 kg/s變化到0.6 kg/s.通過預測控制模型對變風量空調送風系統進行控制,試驗結果分析如下.
2.2.1 風機調節與末端調節
圖8所示為風機風壓調節情況.從圖8可知,當房間3的風量由0.3 kg/s階躍到0.6 kg/s時,預測控制模型對變風量送風系統的風壓進行預測并優化,其值由25 Pa變化到55 Pa.而風機的壓力在第3 h之前,以25 Pa為中心波動,波動最大值為26.24 Pa,平均值為25.124 Pa.在第3 h之后,風機壓力開始上升.在該控制過程中,調節時間為13.8 min,余差為-0.65 Pa,相對偏差為1.18%.
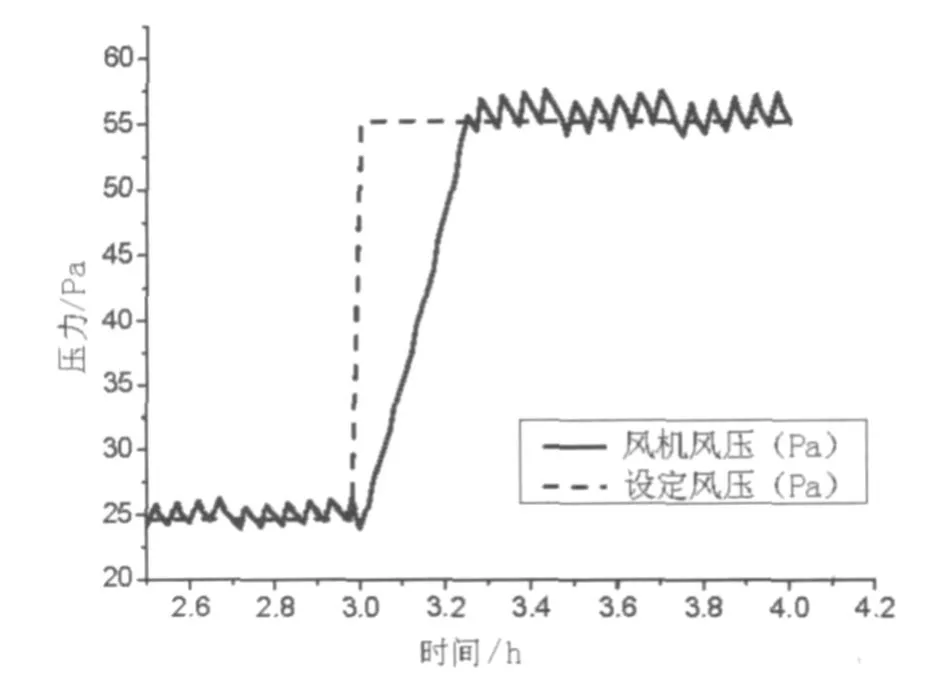
圖8 風機風壓調節
圖9所示為末端風門調節情況.房間1的末端風門開度從0.47變化到0.59,調節時間為28.8 min;房間2的末端裝置風門開度從0.60變化到0.73,調節時間為19.2 min;房間3的末端裝置風門開度從0.64變化到0.54,調節時間為16.8 min.
由圖8、圖9可知,風機的壓力調節過程比較穩定,末端調節也非常穩定.這說明風機控制與末端控制是比較協調的.但是這2個調節的時間略長,這是因為風機的調速步長太小.在調節前后,風機的風壓出現波動,這是因為房間1的末端風門一直處于調節過程中,引起了送風系統總風壓的變化.這表明風機風壓控制與末端風量調節存在一定的相互影響.但是圖9顯示,房間1和2的末端并未因此而出現頻繁波動,僅在房間3風量發生階躍變化時出現了調整.這表明送風系統的結構是比較合理的,各個房間的調節沒有出現較大的耦合.

圖9 末端風門調節
2.2.2 各房間的風量調節
圖10所示為房間1的風量調節情況.圖10反映出房間1風量受到了房間3風量變化的影響.這表明變風量空調送風系統是一個有機整體,各個房間的末端控制存在的耦合是不能完全消除的.由圖10可知,在房間1的送風量調節過程中,超調量為192.75%,調節時間為33 m in,峰值時間為16.8 min,上升時間為13.8 min,最大動態偏差為0.199 kg/s,穩定后的平均值為0.103 4 kg/s,余差為-0.003 4 kg/s,相對偏差為3.4%.
圖11所示為房間2的風量調節情況.由圖11可知,在房間2的送風量調節過程中,超調量為30.13%,調節時間為19.8 min,峰值時間為13.8 min,上升時間為7.8 min,最大動態偏差為0.100 5 kg/s,穩定后的平均值為0.200 79 kg/s,余差為-0.000 79 kg/s,相對偏差為0.4%.

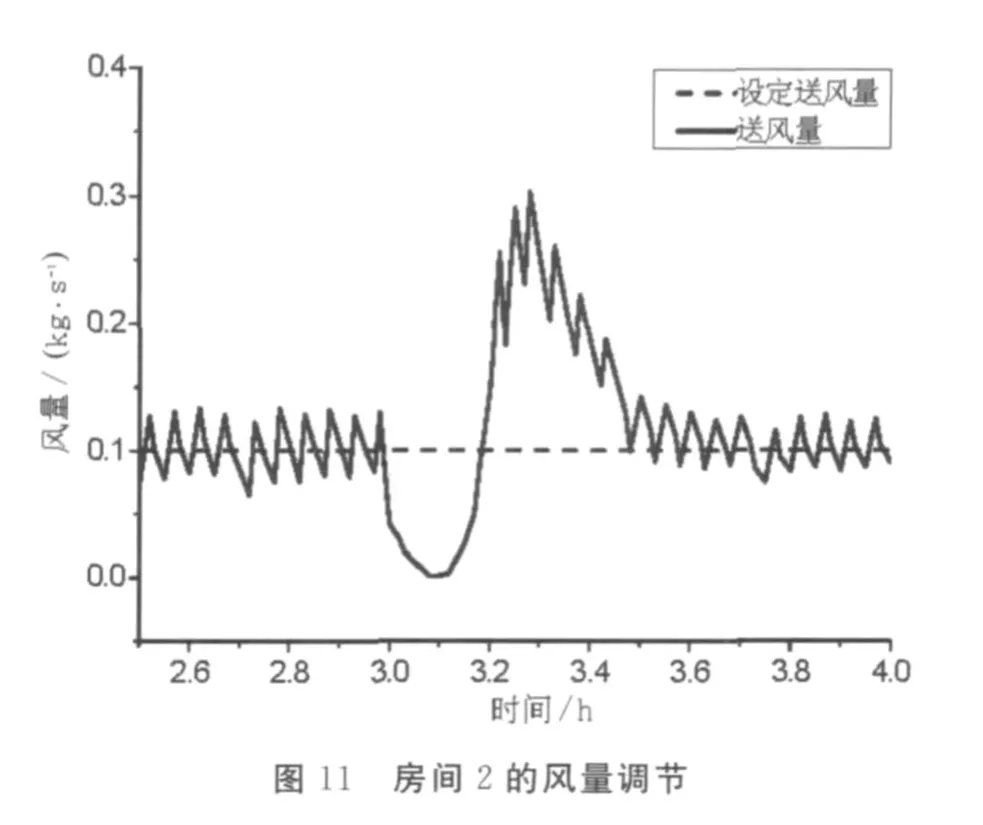
圖12所示為房間3的風量調節情況.由圖12可知,房間3的設定風量在第3 h時從0.3 kg/s變化到0.6 kg/s.房間3的送風量先是降至0.18 kg/s,再逐漸增至0.6 kg/s附近.在風量調節過程中,超調量為10%,調節時間為13.2 min,峰值時間為10.8 min,上升時間為7.8 min,最大動態偏差為0.064 kg/s,重新穩定后的平均值為0.588 kg/s,余差為0.011 kg/s,相對偏差為1.8%.從整個送風系統來看,房間3的風量變化引起了其他房間風量的重新分配,這表明送風系統的結構對風量分配的影響不可消除,穩定的結構可以增強各房間風量分配的準確性,使風量分配具有很高的靈活性;從控制效果來看,采用基于通風網絡技術的預測控制模型,可以使各控制環節協調運行,增強控制系統的可靠性.
2.2.3 各房間的風管調節閥調節
圖13所示為各房間風管風閥的調節情況.由圖13可知,在房間3的風量信號階躍變化后,房間1的風閥阻力系數從1.67降到0,而房間2的風閥阻力系數從1.27增至1.67,房間3的風閥阻力系數從0增至1.67.這是預測控制模型穩定性優化的結果.但這也使各房間的風量在調節時出現大幅下降.不過,經過風管風閥的調節,降低了末端風門大幅度變化所引起的系統送風量變化幅度.
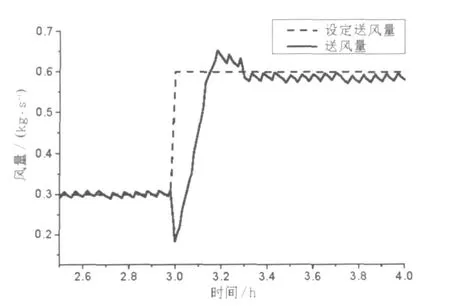
圖12 房間3的風量調節
3 結 語
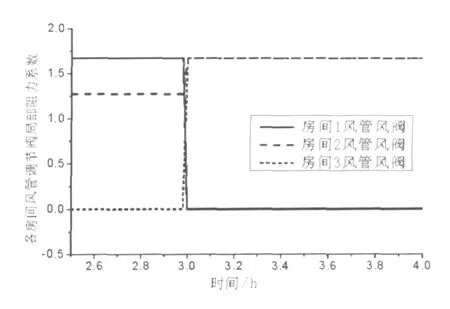
圖13 各房間風管風閥的調節
為了增強變風量送風控制系統的可靠性,對變風量空調送風系統采用預測控制模型進行控制.該模型基于通風網絡技術建立起來,具有很強的靈活性和準確性,能方便地計算送風系統各個控制環節的調節參數,為各環節的協調運行提供指導.在試驗中,風機的調節時間為 13.8 m in,而末端調節最長時間為28.8 min,最少時間僅為16.8 min;僅僅只有十多個調節動作便可完成風量調節;調節過程中,各環節運行協調;從各個房間的風量分配來看,穩定后風量的相對偏差最大的為3.4%,最小的為0.4%,風量分配非常準確.可見,這種控制方法大大提高了變風量空調送風系統的及時性、穩定性和可靠性.
[1]田應麗,任慶昌.基于DDC的變風量空調機組負荷模糊控制[J].制冷與空調,2007,7(6):17.
[2]Zaheer-uddin M.and Zheng G R.A Dynamic Modelof a M ulti-zone VAV System fo r Control Analysis[J].ASHRAE Trans,1994,100(1):219-229.
[3]范孝軍.通風系統網絡模擬在優化通風系統中的應用[J].科技資訊,2009,33:247-249.
[4]孫寧,李吉生,彥啟森.變風量耦合特性研究第二分:應用分析[R].北京:全國暖通空調制冷1998年學術年會,1998.
Study on Model Predictive Control of VAV Air Supply System
Q IU Guo-yong,HE Da-si,FAN Xiao-wei
(Zhongyuan University of Technology,Zhengzhou 450007,China)
In this paper,a model of VAV air supp ly system is established based on ventilation netwo rk,by w hich themodel p redictive control is used to control the VAV air supp ly system.Simulation tests show that the structure of VAV air system,w hich is controlled by this control strategy is very stable and flexible,the control system has good performance.The distribution of air volume by air supp ly system can be ensured timely and accurate.
VAV air supp ly system;ventilation network;model p redictive control
TU 831.8
A
10.3969/j.issn.1671-6906.2011.01.007
1671-6906(2011)01-0026-05
2010-11-08
河南省教育廳自然科學研究資助計劃項目(2011A 560014)
邱國永(1982-),男,河南開封人,碩士生.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
