紅外成像導引頭模糊PD控制器設計與仿真*
2011-12-07 08:04:24張向鋒李言俊
彈箭與制導學報 2011年3期
張向鋒,李言俊
(西北工業大學航天學院,西安710072)
0 引言
紅外成像導引頭具有靈敏度高、能夠在復雜背景條件下識別目標、抗電磁干擾能力強、打擊目標種類多、全天時工作、能夠實現發射后不管等特點,已成為世界各國軍事應用中重點研究和競相發展的關鍵技術之一[1]。導引頭預定回路的主要功能是實現光軸預置,將導引頭的光軸預定指向需要的方向,減小目標截獲時間,提高目標截獲概率。
模糊控制與經典PID控制相比具有無需建立被控對象的數學模型,對被控對象的時滯、非線性和時變性具有一定適應能力等優點,同時對噪聲也具有較強的抑制能力。文中將模糊控制與經典PID控制優點相結合設計了一種模糊PD控制器,使紅外成像導引頭預定回路具有良好的動態性能與跟蹤精度。
1 紅外成像導引頭預定回路數學模型
1.1 紅外成像導引頭預定回路組成原理
預定回路主要由控制器、伺服系統、成像系統、電位計和A/D轉換電路組成。其原理框圖如圖1所示。控制器根據預定信號up以及成像系統光軸實際角位置uφ的角誤差信號形成角速率指令控制隨動系統以規定的速度轉動來消除角誤差,完成紅外成像導引頭光軸的預定功能。
1.2 紅外成像導引頭伺服系統數學模型
寫出電機電樞回路電壓平衡方程:

式中:Ri為功放電路輸出電阻,一般可忽略;Rd為電機電樞電阻;Ke為電機反電動勢導數;ua為電源電壓。電機電樞電流Id與電磁轉矩Md有以下關系:
式中,Km為電機力矩系數。
按牛頓第二定律給出力矩平衡方程:

式中:Mc為靜摩擦力矩;Ωd為電機轉速;Mφφ為引線阻力矩;φ為框架角;Jd為電機電樞轉動慣量;Jp為負載轉動慣量。
導引頭框架角按下式計算:

1.3 紅外成像導引頭伺服系統數學模型簡化
忽略干擾力矩并忽略非線性影響,紅外成像導引頭伺服系統數學模型推導簡化為:

式中:

導引頭框架角為:
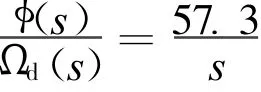
通過計算給出伺服系統簡化的數學模型為:

2 模糊PD控制器設計
基本模糊控制系統包括模糊化處理、模糊推理和清晰化控制三個環節,模糊PD控制器控制框圖如圖1所示[2]。
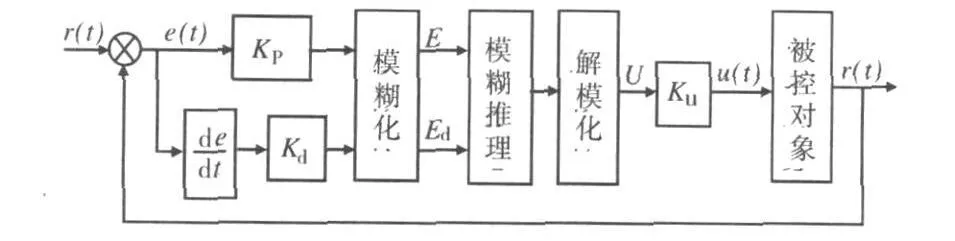
圖1 模糊PD控制器框圖
在模糊PD控制器中引入增益Kp和Kd分別對誤差信號及誤差變化率信號進行規法處理,使其值域范圍與模糊變量的論域相吻合。通過對誤差信號和誤差變化率信號進行模糊化、模糊推理及反模糊得到精確的控制量U,通過規范化增益Ku后就可以得到控制信號u(t)。
2.1 設計技術指標要求
紅外成像導引頭預定回路設計技術指標要求:
1)預定角10°范圍內上升時間小于0.15s,超調量小于10%;
2)彈體正弦擾動幅值1.5°、頻率3Hz情況下,預定誤差小于0.5°。
2.2 模糊集定義及其隸屬函數
采用誤差及誤差的變化率構成的二維模糊控制器,定義模糊集:
e={NB,NM,NS,ZO,PS,PM,PB}({負大 ,負中 ,負小 ,零,正小 ,正中,正大})
de={NB,NM,NS,ZO,PS,PM,PB}({負大,負中,負小,零 ,正小,正中,正大})
u={NB,NM,NS,ZO,PS,PM,PB}({負大,負中,負小,零 ,正小,正中,正大})
其中,e、de分別表示誤差及誤差的變化率的模糊集,其隸屬函數如圖2所示,u為控制量的模糊集,隸屬函數如圖3所示。

圖2 e和de的隸屬函數
模糊化處理就是將模糊控制器輸入量的確定值轉換為相應模糊語言變量值的過程,此相應語言變量值均由對應的隸屬度來定義。通過把輸入變量映射到合適的響應論域量程的過程,精確的輸入數據就變換成適當語言值或模糊集合的標識符。
2.3 模糊規則
建立誤差及誤差變化率的模糊量與控制信號模糊量之間的關系,采用重心法將模糊輸出精確化,給出模糊控制的模糊規則如表1所示。

表1 模糊控制規則表
3 仿真
取模糊控制器中增益Kp=2,Kd=1/13,Ku=1.1。預定角指令為5°,導引頭預定回路數字仿真結果曲線如圖4所示,從圖中可以看出,導引頭預定回路上升時間為0.09s、超調量為2%,滿足指標要求。當預定角指令為 10°,彈體正弦擾動幅值為1.5°、頻率為3Hz,導引頭預定回路數字仿真結果曲線如圖5所示。從圖中可知,彈體擾動條件下預定誤差為0.35°,滿足技術指標要求,說明所設計的模糊PD控制回路有良好的動態性能和跟蹤精度。

圖4 預定回路階躍響應曲線

圖5 彈體擾動條件下預定回路階躍響應曲線
4 結論
文中建立了紅外成像導引頭預定回路伺服系統的數學模型,并通過推導給出了用于控制器設計的簡化模型,采用模糊PD控制設計了導引頭預定回路控制器;對導引頭預定回路進行仿真分析的結果表明,采用模糊PD控制的導引頭預定回路具有良好的動態性能和跟蹤精度。
[1]張義廣,楊軍,朱學平,等.非制冷紅外成像導引頭[M].西安:西北工業大學出版社,2009.
[2]薛定宇.控制系統計算機輔助設計[M].北京:清華大學出版社,2006.
[3]耿峰,祝小平.精確制導武器紅外成像導引頭控制系統研究[J].宇航學報,2007,28(3):535-538.
[4]Chen Guanrong,Hao Ying.Stability analysis of nonlinear PI control systems[C]//IEEE IFIS 1993 Third International Con-ference,1993:128-133.
[5]張化光,何希勤.模糊自適應控制理論及其應用[M].北京:北京航空航天大學出版社,2002.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00