基于虛擬樣機的空空導彈引戰模型*
2011-12-07 08:04:20李合新
彈箭與制導學報 2011年3期
關鍵詞:模型
李合新
(中國空空導彈研究院,河南洛陽471009)
0 引言
虛擬樣機技術可以縮短研制周期、降低研制成本、提高產品設計質量。近年來,虛擬樣機技術在國內外發展較快,已在航空航天等領域的復雜產品設計和試驗中得到了較好的應用。某型空空導彈在研制過程中借助了制導系統虛擬樣機技術,在靶試彈道預測、參數優化、性能驗證等方面發揮了重要作用。
為借助空空導彈虛擬樣機進一步研究彈目末端交會過程、毀傷情況、引戰配合情況及殺傷概率,需要在導彈虛擬樣機中增加對引戰系統的仿真。文中介紹了一種適用于總體性能研究的引戰系統仿真建模方法,該模型能夠利用制導系統仿真信息實時進行引信探測、碰撞檢測計算和戰斗部飛散過程模擬等。
1 某型導彈虛擬樣機簡介
某型空空導彈虛擬樣機目前僅由制導仿真子系統和視景仿真子系統組成,所以也稱為導彈制導系統虛擬樣機,其構成如圖1所示。其中制導仿真子系統在VC++環境下開發各仿真模塊的用戶函數,并在武器系統虛擬樣機設計環境[1]下進行模塊組裝與接口連接,通過運行實現導彈攻擊過程的實時彈道仿真;視景仿真模塊借助3D建模工具MultiGen Creator進行實體和場景的建模,并借助視景仿真軟件Vega再現場景和攻擊過程,達到逼真的仿真效果。制導仿真子系統通過以太網或同步內存的方式向視景仿真子系統實時傳輸彈道信息[2]。
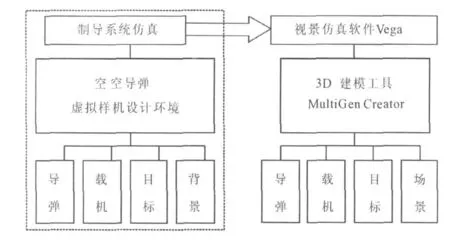
圖1 空空導彈制導系統虛擬樣機結構
2 引戰系統分析及仿真建模要求
2.1 引戰系統分析
空空導彈引戰系統由引信、戰斗部和安保機構構成,其中引信同時含近炸、模塊和自炸3個模塊。
先進的導彈一般采用制導引信一體化設計,讓引信充分利用制導信息,提高引信的抗干擾能力和引戰配合效果。飛控計算機控制引信加電,并根據彈目相對運動關系實時計算引信延遲時間。當引信探測到目標后,向飛控計算機發出“目標存在”信號,飛控延時后再向引戰系統發出“引爆”信號。
2.2 引戰系統仿真建模要求
目前國內對引戰系統進行數學仿真的建模方法較多,但這些方法一般僅適用于單獨引戰系統仿真,并不適合與制導系統進行聯合仿真。根據制導虛擬樣機的運行原理,結合引戰系統仿真自身要求,總結對引戰系統進行仿真建模應遵循的原則如下:
1)真實性:能夠真實反映交會狀態和引戰系統性能,并有足夠的精度;
2)實時能力:可在末端彈道上連續實時計算;
3)快速性:不過分影響系統的仿真運行速度;
4)接口要求:可與制導仿真子系統實現無縫連接,所有輸入參數均可以從制導仿真中獲取。
3 引戰仿真子系統建模方法
3.1 仿真坐標系選擇與坐標轉換
制導仿真以地理系(CKOg)為基準系,輸出的彈道信息包括導彈、目標的位置和姿態,這些信息確定了彈目相對關系,可供引戰仿真使用。地理系以導彈發射點在大地上的投影為原點,采用北天東坐標系統。
引戰系統工作于近距,末端交會仿真需要導彈和目標幾何外形,用目標系(CKOt)和彈體系(CKOm)定義。目標系原點設在目標的幾何中心,X軸沿目標縱軸為正方向,Y軸取在目標對稱平面內,向上為正,Z軸構成右手系。彈體系定義與目標系類似。
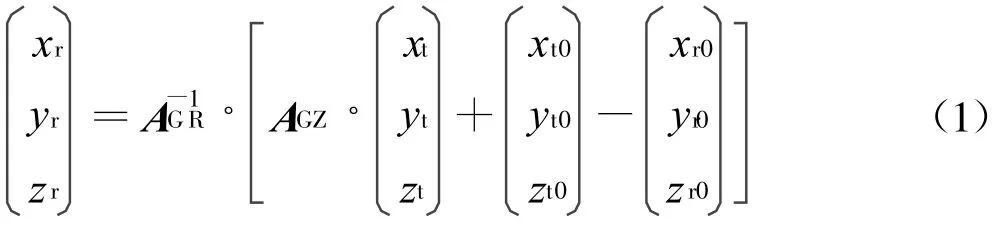
導彈和目標在地理系中的位置和姿態確定后,可將目標上一點轉換到彈體系中。設地理系中導彈位置(xr0,yr0,zr0)′、目標位置(xt0,yt0,zt0)′、彈體系到地理系轉換矩陣AGR、目標到地理系轉換矩陣AGZ,對目標上任意一點(xt,yt,zt)′,轉換到彈體系中的坐標(xr,yr,zr)′為 :
3.2 仿真模型分割與組裝
根據引戰系統原理將引戰系統功能模塊劃分為近距探測、碰撞檢測、自炸、延時與炸點控制、戰斗部飛散及毀傷判定等子模塊。根據制導系統和引戰系統的工作關系,將引戰系統仿真模型插在制導仿真和視景仿真兩個模塊之間,引戰仿真輸入來自制導仿真,仿真結果可用于渲染末端交會過程。
基于以上分析,建立引戰仿真模型,并與制導仿真、視景仿真模型連接,確定接口關系,如圖2所示。其中與制導仿真的接口信息包括彈道信息(導彈和目標的位置、姿態)和飛控對引信的控制信息;對視景仿真的輸出除轉接彈道信息外,主要包括引信視場傾角和作用距離、戰斗部殺傷元飛散等信息。
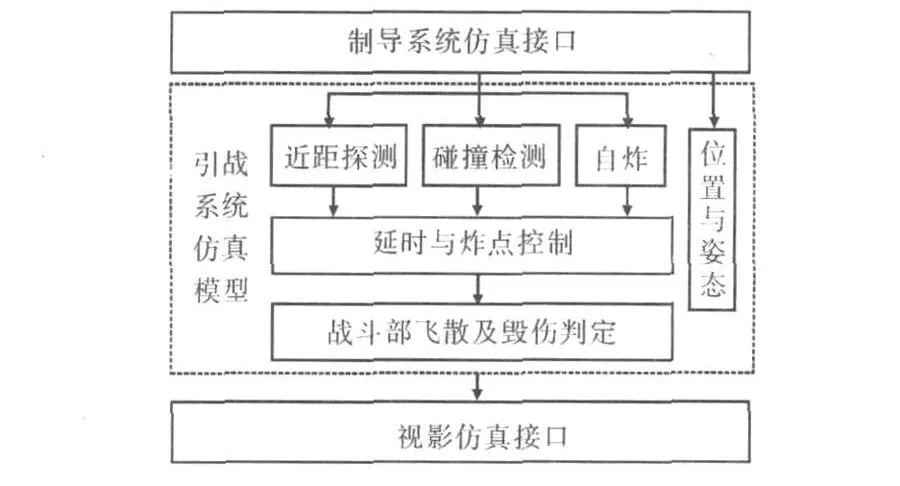
圖2 引戰仿真模型結構及與制導、視景仿真接口
3.3 引戰系統仿真步長確定
引戰虛擬樣機與制導虛擬樣機連接,首先必須考慮外接口同步,采用制導仿真步長;其次,引戰虛擬樣機內部要考慮仿真精度,包括引信探測、炸點輸出、碰撞檢測、戰斗部殺傷元飛散等,需要對制導仿真步長進行細分,多步實現;第三要考慮仿真計算量,仿真步長不可過小。制導仿真步長為1ms,考慮上述因素,引戰仿真步長取0.2ms較為合適。
4 引戰系統各子模塊建模方法
4.1 近距探測模型
近距探測模型模擬近炸引信探測和啟動過程。
近炸引信的探測和啟動特性用一些主要參數描述,如引信視場傾角、作用距離、進入目標深度等。
對近炸引信探測仿真可采用觸發線方法[3]進行建模,如圖3所示。圖中引信距導彈中心的距離為L,引信視場中心傾角和視場寬度分別為α和Δ α,引信作用距離為R。

圖3 觸發線模型
先研究目標上的一點(xt,yt,zt)′是否被引信探測到。該點轉換到彈體系的坐標為(xr,yr,zr)′。計算目標點離引信中心距離dDM及目標視線與彈軸的夾角β:
引信探測到目標上一個點不等于引信能夠馬上啟動。對引信啟動特性仿真,可采用多種方法,如:
1)兩點法:當引信探測到目標表面上的一個點后,根據引信啟動特性取一個足夠使引信啟動的最小時間,在此時間段內不進行探測計算,當啟動時間結束時再判斷一次,若在探測場內仍存在一個目標點,則確認引信啟動;
2)探痕長度法:在某一交會時刻如果目標上有兩個以上點能被引信探測到,且存在兩點距離大于一門限值,確認引信啟動;
3)進入深度法:由仿真步長和彈目接近速度可計算出引信進入目標的深度。當引信連續探測到目標且達到一定的進入深度時,確認引信啟動。
4.2 碰撞檢測模型
碰撞檢測模型模擬觸發引信的工作。把導彈簡化成1個或3個圓柱體。設目標上一點轉換到彈體系的坐標為(xr,yr,zr)′,判斷目標上一點與彈體的關系,若此點在彈體內,可判定彈體與目標相撞,將碰撞標志送至延時起爆模塊。判斷條件為:

式中,x1、x2為圓柱體軸向前、后界,r為圓柱體半徑。
4.3 自炸模型
引信自炸模塊從引信加電開始計時,計時完成后給出炸點。根據自炸模塊的計時起點和時間常數直接設置計時器,如果觸發和近炸引信均未作用,計時結束后將自炸標志傳給延時與炸點控制模塊。
4.4 延時與炸點控制模型
延時與炸點控制建模包括兩方面:
1)引信延遲時間計算。根據交會條件,實時計算最佳引戰配合延時:

式中:vr為彈目相對速度,k1、k2、k3為根據交會角、攻擊平面夾角、目標類型、目標指示精度等參數實時查表得出的常數。
2)炸點控制。當近炸模塊給出“目標存在”標志后,根據當前最佳延遲時間進行計時,結束后輸出炸點。如果接收到來自碰撞檢測模塊和自炸模塊輸出的碰撞或自炸標志,不經延時直接給出炸點。
4.5 戰斗部飛散及毀傷判定模型
戰斗部爆炸后通過殺傷元高速飛散殺傷目標,爆炸離目標較近時爆轟波也可直接毀傷目標。
以聚焦式離散桿戰斗部為例進行建模。戰斗部的主要性能指標包括威力半徑、飛散方向角、飛散角、桿條參數、初速均值與方差、速度衰減系數等,這些參數可以從戰斗部靜爆試驗中獲得。戰斗部爆炸后,殺傷元(離散桿)以一定的初速向外飛散,在彈體系中可以看作是一個逐漸擴大的圓環。若忽略空氣的阻力(時間極短,可不考慮),在彈體系中殺傷元向外擴散的過程與戰斗部靜爆的飛散過程是一致的,近似等效為飛散環。飛散環是一個動態變化的物體,飛散環特性用飛散半徑R、環截面半徑r和戰斗部威力半徑D三個參數描述,其中R根據戰斗部靜爆初速飛散時間計算,r根據初速、飛散時間和飛散角計算。戰斗部威力半徑D限制了環半徑的上限。飛散環模型見圖4。
目標是否被毀傷是一個復雜的問題,與戰斗部威力、目標易損性、引戰配合等因素有關。為滿足仿真快速性要求,將問題簡化,只考慮引戰配合和戰斗部威力半徑,不考慮目標易損性,這種方法完全能夠滿足導彈性能和引戰配合研究的需要。
下面研究目標毀傷判據,假定毀傷結果有1(被毀)和0(完好)兩種狀態,當以下三個條件中任何一個滿足時,判定目標被毀:
1)導彈和目標直接發生碰撞,此標志由碰撞檢測模塊給出;
2)爆轟波毀傷,在戰斗部爆炸瞬間目標離戰斗部質心的距離在戰斗部的爆轟波威力半徑之內;
3)戰斗部飛散環與目標碰撞。
其中戰斗部飛散環與目標碰撞的判斷算法較復雜,下面給出計算方法。
如圖4所示,設O點為導彈質心,同時也是戰斗部的中心。戰斗部飛散環在彈體系的YZ平面內,環半徑和環截面半徑分別為R和r。已知目標上一點A轉換到彈體系中的位置為(xa,ya,za)′,研究此點是否與飛散環相遇。
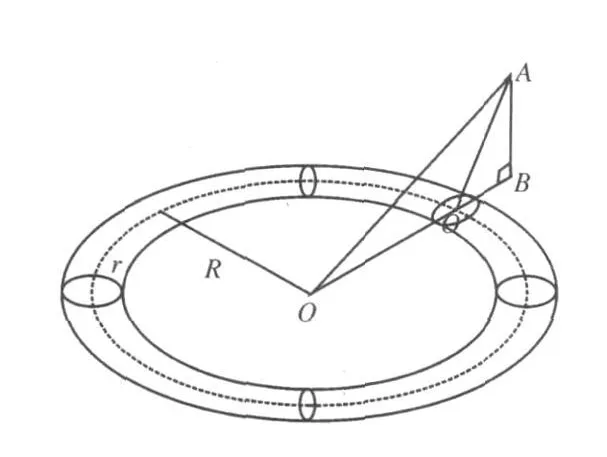
圖4 目標點與戰斗部飛散環關系圖
先過O點與A點作垂直于Y Z平面的輔助平面OAB, B(0,ya,za)′點為A點在YZ平面的投影,OAB平面垂直切割戰斗部飛散環截得一個圓截面,其半徑為r,圓心O′在彈體系中的坐標為:

判斷A點是否落入所求的圓截面內,即可知 A點是否在飛散環內。A點落入圓截面的條件為:

若目標上任何一點與戰斗部飛散環相遇,即判斷飛散環撞擊目標。當戰斗部飛散環半徑大于戰斗部威力半徑時,停止毀傷計算。
5 視景仿真改造
視景仿真模塊已實現了實體目標的三維顯示,為研究末端交會詳細過程,在原視景仿真基礎上增加引信視場空心錐面和戰斗部飛散環,為此建立引信視場空心錐和戰斗部飛散環3D模型并載入場景,通過開關變量控制它們的顯隱,其中引信探測場在近炸引信工作時同步顯示,戰斗部飛散環從起爆信號給出后開始,并逐漸擴大。
6 結論與仿真實例
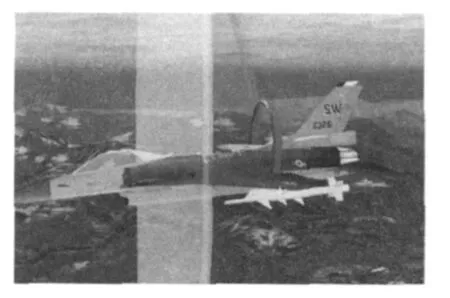
圖5 末端交會過程戰斗部爆炸后某一瞬間畫面
建立引戰仿真模型后,與制導仿真、視景仿真實現了順利連接,導彈虛擬樣機功能更加完整,經實際運行效果良好。圖5是截取末端交會過程戰斗部爆炸后某一瞬間目標通道畫面,畫面中除目標外還可以觀察到導彈、引信視場、戰斗部飛散錐等。從圖中可以看出戰斗部飛散錐殺傷目標的大致部位,驗證了引戰配合的合理性。
[1]趙建衛,唐碩,吳催生.武器系統虛擬樣機設計環境[J].飛行力學,2000(2):15-18.
[2]崔顥,趙建衛,唐碩.基于RTNET的分布仿真設計[J].航空兵器,2002(1):42-44.
[3]掌亞軍.引信觸發線模型在空空導彈殺傷效能仿真中的應用[J].航空兵器,2000(4):21-23.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19