基于聯合卡爾曼濾波的汽車防碰撞多傳感器信息融合方法
2011-12-02 03:26:36孔金生張西雅崔盈慧
鄭州大學學報(理學版) 2011年3期
孔金生,張西雅,崔盈慧
(鄭州大學 電氣工程學院 河南 鄭州 450001)
基于聯合卡爾曼濾波的汽車防碰撞多傳感器信息融合方法
孔金生,張西雅,崔盈慧
(鄭州大學 電氣工程學院 河南 鄭州 450001)
車輛行駛信息感知是汽車防碰撞系統(tǒng)的關鍵技術之一,只用單一傳感器對目標車輛進行測量容易產生虛警.在對聯合卡爾曼濾波分析的基礎上,給出了基于聯合卡爾曼濾波的汽車防碰撞多傳感器信息融合方法.計算機仿真結果表明,該算法可以得到較精確的融合數據,對于增強汽車防碰撞系統(tǒng)的安全性具有重要意義.
聯合卡爾曼濾波; 汽車防碰撞; 信息融合
0 引言
國際上對汽車防碰撞系統(tǒng)的研究始于20世紀60年代,主要以德國、美國和日本為代表,我國起步較晚[1-2].目前的汽車防碰撞系統(tǒng)主要根據測距設備的不同來區(qū)分,但由于汽車防碰撞系統(tǒng)工作的環(huán)境惡劣,由單一傳感器做出的判斷容易產生虛警,為了提高對目標的識別和估計能力,需要將多傳感器信息融合用在汽車防碰撞系統(tǒng)中.卡爾曼濾波器是Kalman在1960年提出的,由于其結構簡單,易于實現等特點,使卡爾曼濾波成為多傳感器信息融合系統(tǒng)的最基本要素.由文獻[3-4]知常規(guī)卡爾曼濾波在處理多傳感器信息融合時存在計算量大和故障數據相互污染等問題.文獻[5]將卡爾曼和粒子結合形成卡爾曼/粒子組合濾波,降低了計算復雜度,但濾波器的估計性能一般.文獻[6]應用3D雷達來獲得目標的位置和速度信息,但容易產生虛警.
為了減少計算復雜度,提高濾波精度,本文基于Carlson提出的聯合卡爾曼濾波算法[7],實現多傳感器信息最優(yōu)融合的濾波器設計,并將其應用于汽車防碰撞系統(tǒng).最后給出的仿真結果表明該算法可提高系統(tǒng)的計算精度,減少計算復雜度,增強了汽車防碰撞的安全性.
1 聯合卡爾曼濾波方法
1.1聯合卡爾曼濾波原理
聯合卡爾曼濾波器是一種分塊估計、兩步級聯數據處理技術.聯合濾波的基本思想是先分散處理, 再全局融合.在聯合濾波中, 子系統(tǒng)包括外部傳感器1,2,…,N,標準的卡爾曼濾波器分別對應于不同的傳感器, 形成多個局部濾波器, 每個局部濾波器并行工作, 通過全局濾波器進行信息綜合、順序處理,并對所有局部輸出產生的濾波結果進行信息融合, 給出全局最佳狀態(tài)估計[8].在通常情況下,聯合卡爾曼濾波可以大大降低計算量, 應用靈活方便,具有高水平的故障檢測、隔離、重構能力.
1.2聯合卡爾曼濾波算法
對于線性定常多傳感器組合系統(tǒng),可用離散形式X(k+1)=Φ(k)X(k)+G(k)V(k)來描述,X(k)是k時刻目標的狀態(tài)向量,Φ(k)是狀態(tài)轉移矩陣,G(k)是過程噪聲分布矩陣,過程噪聲V(k)是具有零均值和正定協方差矩陣Q(k)的高斯噪聲向量,且有E[V(k)VT(l)]=Q(k)δkl.
設有N個傳感器對系統(tǒng)進行獨立觀測,相應有N個局部濾波器,每個局部濾波器均可獨自完成濾波計算.設第i個局部濾波器的模型為:
Xi(k+1)=A(k)Xi(k)+G(k)V(k);Zi(k)=Hi(k)Xi(k)+Wi(k),

2 基于聯合卡爾曼濾波的多傳感器信息融合算法
2.1汽車防碰撞系統(tǒng)結構
汽車防碰撞系統(tǒng)是利用現代信息技術、傳感器技術來探測車輛周圍的情況,為駕駛員提供信息,防止或減小車輛與車輛,或者車輛與障礙物之間的碰撞.汽車防碰撞系統(tǒng)的結構如圖1所示.
本文采用雷達和紅外傳感器來獲得車輛的信息,將獲得的信息分別進行預處理,再將處理后的信息送到融合中心,然后用聯合卡爾曼濾波器實現信息融合.融合得到的值將與控制中心設定的安全距離進行比較.
2.2基于聯合卡爾曼濾波的多傳感器信息融合算法
對于本文的汽車防撞系統(tǒng),局部濾波器(i=1,2)根據各自觀測量進行局部最優(yōu)估計,這一層是并行處理的分散估計,利用常規(guī)的集中式卡爾曼濾波器進行局部狀態(tài)估計.卡爾曼濾波器可分為兩個部分:時間更新方程和測量更新方程.其原理如圖2所示.
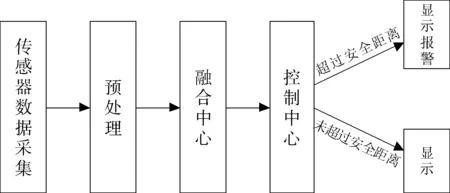
圖1 汽車防碰撞系統(tǒng)結構圖Fig.1 The structure of automotive anti-collision system
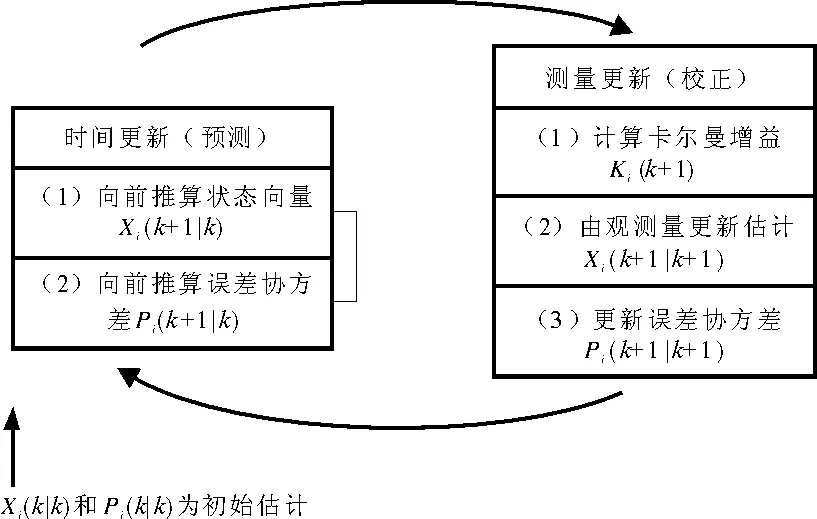
圖2 Kalman濾波器原理圖Fig.2 The schematic diagram of Kalman filter
濾波器的時間更新方程為:

狀態(tài)更新方程為:

Pi(k+1|k+1)=[I-Ki(k+1)Hi(k+1)]Pi(k+1|k),



3 仿真研究
本文以汽車防碰撞系統(tǒng)為例,對本文設計的聯合卡爾曼濾波算法進行了計算機仿真.仿真計算采用的參數為:假設目標車輛的運動速度為3 m/s,采樣周期為T=1 s.過程噪聲和測量噪聲分別為零均值的高斯噪聲,且兩者相互獨立.
圖3為雷達測量信號得到的速度信號和經過卡爾曼濾波得到速度信號的比較,圖4為紅外傳感器測量信號得到的速度信號和經過卡爾曼濾波得到的速度信號的比較.由圖3和圖4知,相對于原始數據,經過卡爾曼濾波得到數據,噪聲得到了抑制,說明了卡爾曼濾波算法的有效性.
圖5為經過聯合卡爾曼濾波算法后的最終融合速度.由圖5可知,相比于圖3和圖4,噪聲得到了進一步的抑制,濾波器以更快的速度收斂于目標車輛的真實速度.為了進一步說明聯合卡爾曼濾波器的優(yōu)越性,圖6給出了卡爾曼濾波器和聯合卡爾曼濾波器對初始誤差協方差的影響.由圖6可知,在聯合卡爾曼濾波過程中,初始誤差協方差明顯低于卡爾曼濾波的初始誤差協方差;圖7為雷達和紅外傳感器經過卡爾曼濾波和聯合卡爾曼濾波得到數據的比較.
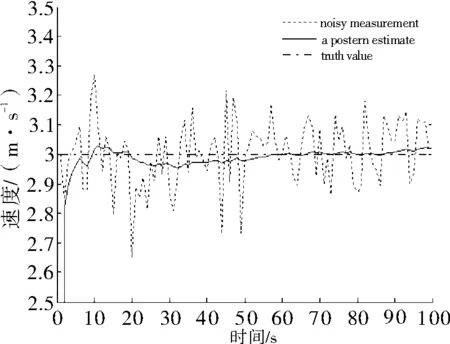
圖3 卡爾曼濾波后的雷達信號Fig.3 Radar signal processed by Kalman filter
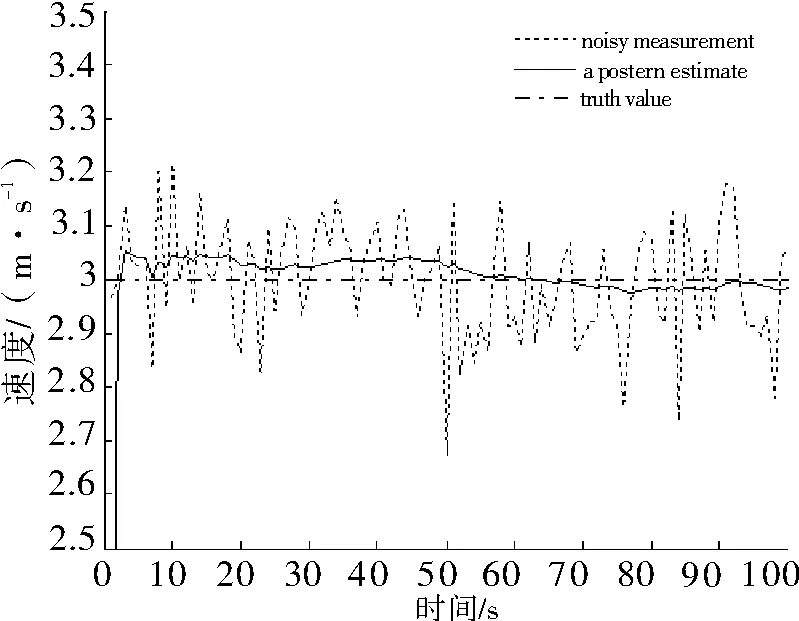
圖4 卡爾曼濾波后的紅外信號Fig.4 Infrared signal processed by Kalman filter
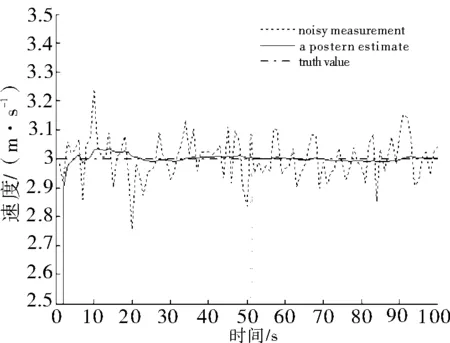
圖5 聯合卡爾曼濾波后的速度值Fig.5 The speed gained by federal Kalman filter
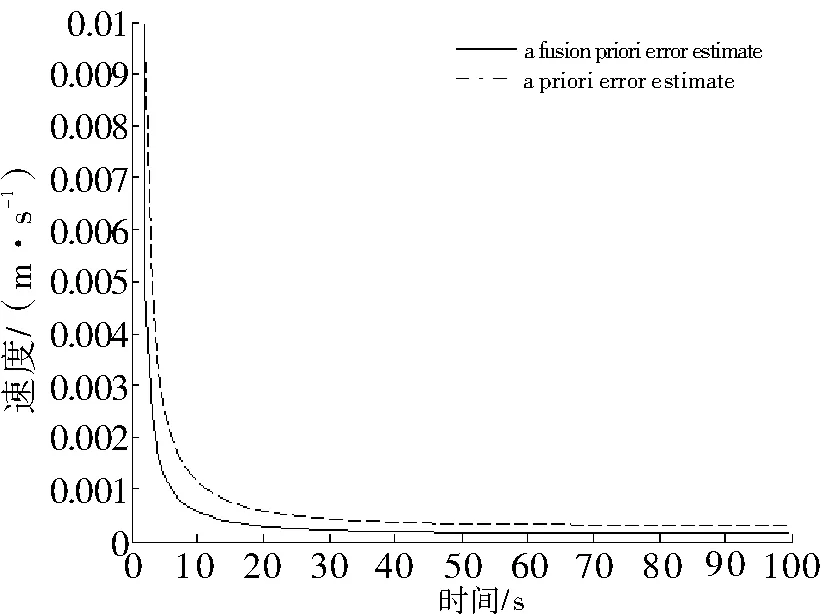
圖6 初始誤差協方差比較Fig.6 The contrast of initial error covariance
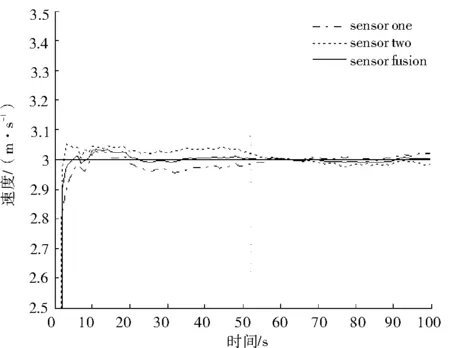
圖7 卡爾曼濾波和聯合卡爾曼濾波速度值的比較Fig.7 The contrast between the speed gained by Kalman filter and that gained by federal Kalman filter
4 結論
本文簡單介紹了汽車防碰撞系統(tǒng)的基本結構及聯合卡爾曼濾波器的基本原理,給出了基于聯合卡爾曼濾波的信息融合算法,并將其應用到汽車防碰撞系統(tǒng)中.仿真結果表明,利用文中提出的方法可以使雷達和紅外傳感器到達較好的融合效果,提高了數據的準確性,從而增強了汽車防碰撞系統(tǒng)的安全性.
[1] 鄧明哲.高速公路追尾碰撞防報警系統(tǒng)的研究[D].武漢:武漢理工大學,2006.
[2] 王京元,王煒,程琳.汽車主動避撞系統(tǒng)關鍵技術研究[J].交通與計算機,2004,22 (4):33-36.
[3] 周倩.車輛組合導航中卡爾曼濾波器的設計及FPGA實現[D].北京:北京交通大學,2009.
[4] 范文兵,陳達.卡爾曼濾波器在狀態(tài)和參數估計中的應用[J].鄭州大學學報:理學版,2002,34(4):44-47.
[5] 崔平遠,鄭黎方,裴福俊,等.基于卡爾曼/粒子組合濾波器的組合導航方法研究[J].系統(tǒng)仿真學報,2009,21(1):220-223.
[6] 王曉博,王國宏,閻紅星,等.利用位置和運動信息的目標識別[J].光電與控制,2008,15(10):5-9.
[7] Carlson N A,Berarducci M P.Federated Kalman filter simulation results[J].Journal of the Institute of Navigation,1994,41(3):297-321.
[8] 崔平遠,黃曉瑞.基于聯合卡爾曼濾波的多傳感器信息融合算法及其應用[J].電機與控制學報,2001,5(3):204-207.
Multi-sensorInformationFusionAlgorithminAutomotiveAnti-collisionSystemBasedonFederatedKalmanFilter
KONG Jin-sheng,ZHANG Xi-ya,CUI Ying-hui
(SchoolofElectricalEngineering,ZhengzhouUniversity,Zhengzhou450001,China)
The perception of vehicle running information was one of the key technologies in automotive anti-collision system.And it was easy to cause false alter when using the single sensor measured the aim vehicle.The multi-sensor information fusion algorithm based on federated Kalman filter was introduced and applied to solve the multi-sensor information fusion problem in automotive anti-collision system.The simulation results showed that the federated Kalman filter can receive accurate fusion data and enhance the safety of automotive anti-collision system.
federated Kalman filter; automotive anti-collision; information fusion
TP 274.2
A
1671-6841(2011)03-0099-04
2010-03-01
河南省創(chuàng)新人才杰出青年計劃項目,編號084100410009.
孔金生(1963-),男,教授,博士后,主要從事復雜系統(tǒng)的智能控制與系統(tǒng)優(yōu)化研究,E-mail:jskong@zzu.edu.cn;通訊作者:張西雅(1986-),女,碩士研究生,主要從事多傳感器信息融合研究,E-mail:zhangxiya2007@163.com.
猜你喜歡
今日農業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
作文大王·低年級(2016年4期)2016-04-18 00:24:37
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
決策探索(2014年21期)2014-11-25 12:29:50