大型同步發電機非線性最優預測綜合控制
2011-10-30 07:29:59蔣鐵錚
電力系統及其自動化學報 2011年6期
蔣鐵錚
(長沙理工大學電氣工程學院, 長沙 410114)
大型同步發電機非線性最優預測綜合控制
蔣鐵錚
(長沙理工大學電氣工程學院, 長沙 410114)
針對靜止勵磁方式和電液調速系統的汽輪發電機組,基于多輸入多輸出非線性預測控制理論,設計出具有解析解控制律的汽輪發電機非線性預測綜合控制器。該設計方法避免了非線性預測控制在線優化帶來的巨大計算負擔及由此產生的控制算法的穩定性問題。控制器的輸入均為當地可測信號且與網絡參數無關,設計參數只有滾動預測時間及控制階。仿真結果表明,該控制器對提高電力系統穩定性和維持機端電壓調節精度是有效的。
多輸入多輸出非線性系統; 預測控制; 電力系統穩定性
提高系統穩定性與滿足發電機機端電壓調節精度是兩個相互矛盾的控制目標,如果改善電壓調節特性,那么功角穩定的動態特性就會變壞,反之亦然。顯然,把這兩個相互矛盾的控制目標都由勵磁系統來實現,其控制效果必將受到影響。近年來,由于調速系統的數字化,其慣性時間常數已大大減小,為通過調速系統直接抑制有功功率的振蕩提供了可能,且對勵磁與調速系統的協調控制研究已取得許多成果[1~5]。富士公司基于線性多變量最優控制理論,開發了發電機多變量綜合控制器,簡稱為TAGEC(total automatic generation controller)[6]。該控制器使發電機的勵磁與調速控制系統集于一體,以利于提高系統穩定性。
電力系統是一個典型的非線性系統,對其完整準確建模并獲得精確的模型參數是不切實際的。預測控制只需一個具有預測功能的模型,避免了對其完整建模和參數準確性的困難,同時,預測控制以滾動的有限時域優化取代經典最優控制中一成不變的全局優化,能夠不斷利用由不確定因素引入系統的新信息對預測結果加以校正,達到比依靠模型進行一次優化的傳統優化算法更為優越的控制效果,具有更強的魯棒性[7]。但非線性預測控制算法在線滾動優化的巨大數值計算負擔及由此產生的控制算法穩定性問題是阻礙這一先進控制理論在電力系統應用的主要障礙。所以,預測控制在電力系統的應用研究大都是基于線性化模型來實現的[8~11]。
針對具有不同關系度的多輸入多輸出仿射非線性系統,本文設計了一種具有解析解控制律的發電機勵磁和主汽門開度綜合控制器。該綜合控制器不需進行在線優化計算,避免了巨大的計算負擔和由此帶來的控制算法穩定性問題。
1 多機電力系統數學模型的建立
考慮n臺發電機互聯電力系統,發電機采用計及勵磁系統動態經典三階模型,則第i臺發電機的數學模型為
1.1 轉子運動方程
(1)

(2)
1.2 電磁暫態方程
(3)
1.3 電氣方程
(4)
Efi=Kciufi
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)

1.4 汽機調速系統的動力學方程[12,13]
考慮到再熱器的時間常數TR(大約10~20 s) 一般遠大于電力系統暫態過渡過程所經歷的時間,所以對于中間再熱式汽輪機組,主要以高壓主調節汽門為受控對象,并假定中間調節汽門不參與調節,即中低壓缸輸出的機械功率PML不變,PML≡PML0,則其動力學方程可表示為

(13)
Pmi=PHi+PMLi
(14)
PHi=CHiPmi
(15)
PMLi=PMLi0=CMLiPmi0
(16)
式中:CHi為高壓汽缸功率分配系數,約為0.3;CMLi為中、低壓汽缸功率分配系數,且滿足CHi+CMLi=1;THΣi為高壓汽缸等效時間常數,約為0.4;ui為高壓缸調節汽門開度。
1.5 狀態變量的選擇


(17)
這里
f(x)=
式中:
其中,x=[Δωi,ΔPei,ΔPmi,ΔVti]T,u=[Efi,u1i]T分別是狀態矢量和控制矢量。
1.6 輸出函數的選取
當電力系統由于故障或其它原因進入暫態過渡過程時,必然導致發電機轉軸上的功率不平衡,即ΔPei≠0,使發電機處于加速或減速,即Δωi≠0,導致發電機功角δi偏移和機端電壓Vti變化,從而使系統失穩或振蕩。綜合控制器的作用就是通過有效地控制發動機組的勵磁和汽輪機主汽門開度,使系統盡快達到穩態,即滿足Δωi=0,ΔVti=0。因此,Δωi=0,ΔVti=0可設為預測控制中參考軌線的設定點。由此,跟蹤目標即參考軌線W(t)可選定為Δωi,ΔVti,則輸出函數可由式(18)給出。
yi1(t)=hi1(x)=Δωi
yi2(t)=hi2(x)=ΔVti
(18)
2 具有不同關系度的多輸入多輸出非線性系統的預測控制器的設計方法
2.1 考慮多輸入多輸出仿射非線性系統
y1=h1(x)
…
ym=hm(x)
(19)
式中:f,gi∶Rn→Rn是光滑向量場;x=[x1,…,xn]T∈Rn為狀態向量;ui(i=1,…,m)為控制量;yi(i=1,…,m)為輸出量;hi(x)∶Rn→R的光滑函數。
對系統(19)作如下假設:①零動態是穩定的;②所有的狀態變量是可用的;③輸出yi(i=1,…,m)與參考軌線Wi(i=1,…,m)對時間t連續充分可微。
2.2 滾動優化性能指標
為了避免非線性最優控制需求解偏微分方程的困難,非線性預測控制采取一種滾動閉環優化控制算法,它是通過某一性能指標的最優來確定未來的控制作用,以達到非線性系統式(19)的輸出yi(t)依據給定的性能指標最優地跟蹤期望的參考軌線W(t)。因此,在任一時刻t起未來有限的時段T,滾動優化性能指標可表示為
(20)

2.3具有不同關系度ρ={ρ1,ρ2,…,ρm}的多輸入多輸出非線性系統的模型預測控制算法
式(19)所示的多變量非線性系統,若每一個輸出yi=hi(x)對應有不同的子關系度ρi,當給定一個控制階r時,任一輸出yi可用Taylor級數展開到ρi+r階,則具有解析解形式的非線性預測控制律能唯一給出[14]:
u(t)=
(21)
式中:
A(x)=



矩陣Γ2的第ij塊的第j行由下式給出,第ij塊的其余行的元素均為0。
i=1,…,r+1,j=1,…,m(設計參數:r和T的選取原則可參文[15])
3 多機系統汽輪發電機綜合控制器設計
依據式(17)、(18)求得其關系度為ρ={2,1}。
若取控制階r=0,可導出汽輪發電機組的勵磁和汽門開度的控制律:
(22)
(23)
電流Idi,Iqi可由式 (8) 及式 (9)確定。即
(24)

(25)
由此,綜合控制器的所有輸入信號僅是當地發電機的可測量(Pei、Qei、Vti、Δωi),且與輸電線路參數無關,因而對輸電線路拓撲結構的改變具有很好的適應性和魯棒性。
4 仿真計算結果與分析
為驗證本文綜合控制器的有效性,利用加拿大Powertech Labs公司的TSAT軟件在圖1所示的多機電力系統上進行仿真計算,其中6號機是調相機,1號機是參考機,分別在2號機到5號機安裝傳統的AVR勵磁調節器、PSS及PID調速器(參數見文[16])和本文綜合控制器(控制器設計參數均選取:控制階r=0和預測時間周期T=0.5 s)。
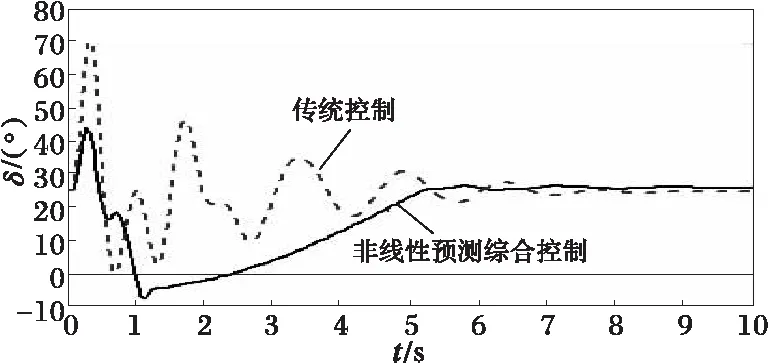
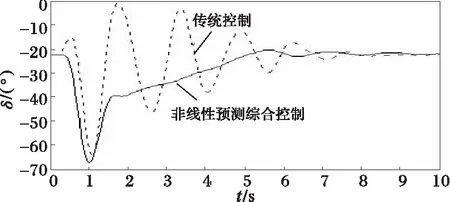
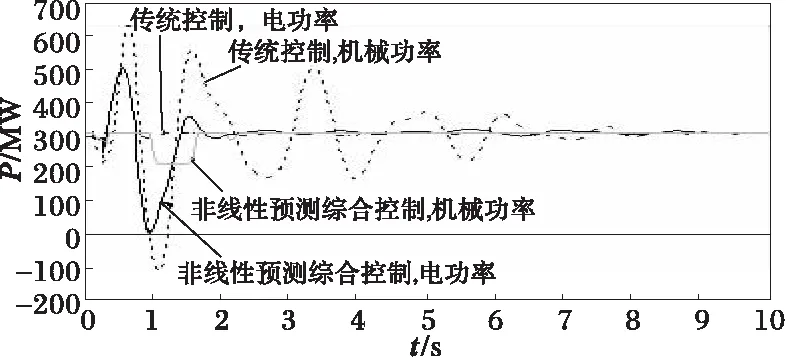
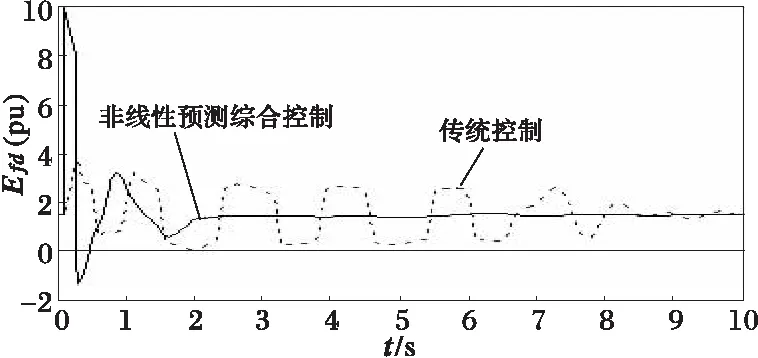
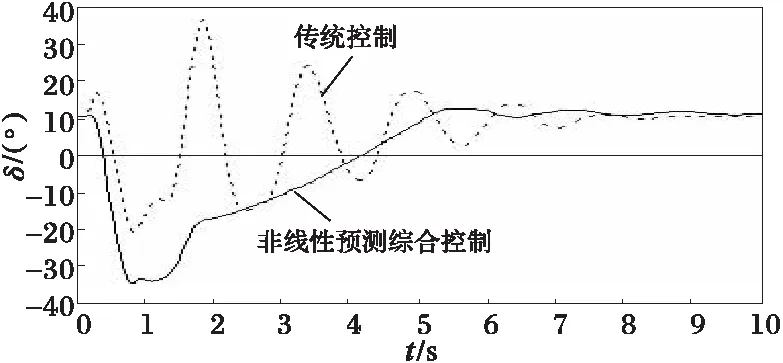
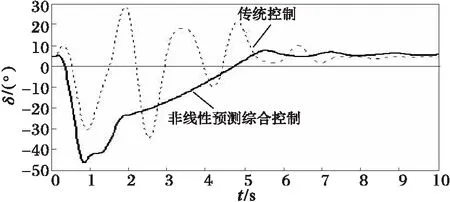
在t=0.1 s時,系統在母線11與12間的線路上發生三相對地短路,故障點距母線11為10%線路長度處。在t=0.25 s時,故障線路被跳開;在t=0.8 s時線路重合閘成功。圖2~5分別給出了各機組在傳統控制和綜合控制器作用下的動態響應曲線。
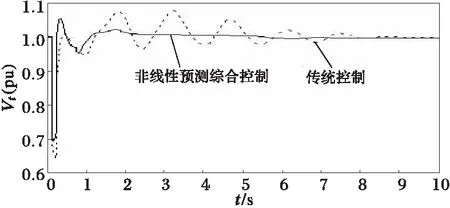
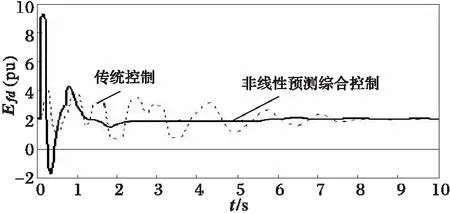
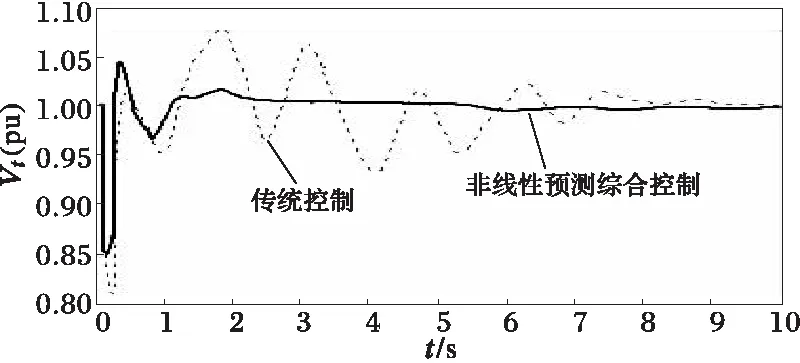
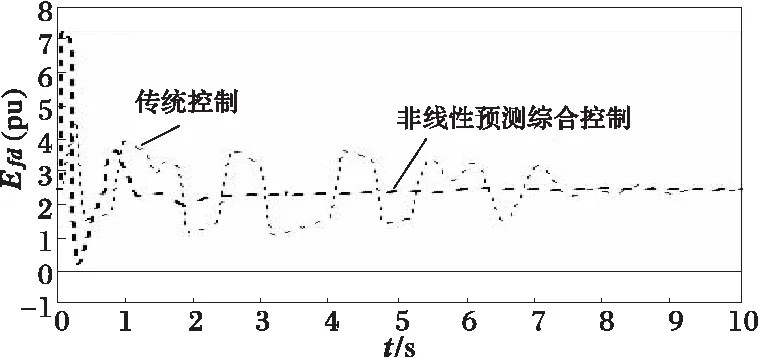
圖2~5中發電機組的勵磁電壓及機端電壓響應曲線表明,本文控制策略具有更好的機端電壓調節精度。這一點可從控制勵磁控制律Efi(式(22))得到很好的解釋。為分析簡單清楚起見,不考慮發電機定子繞組電阻Ra,認為其近似為0,則Gii≈0。于是式(22)的Efi可改寫為
(26)

圖1 多機電力系統結構圖
(a) 2#機組功角響應曲線
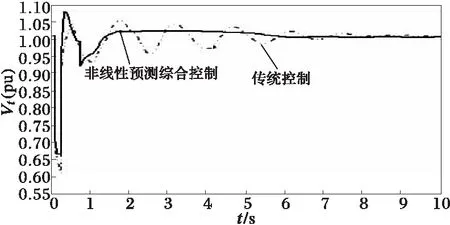
(b) 2#機組機端電壓響應曲線
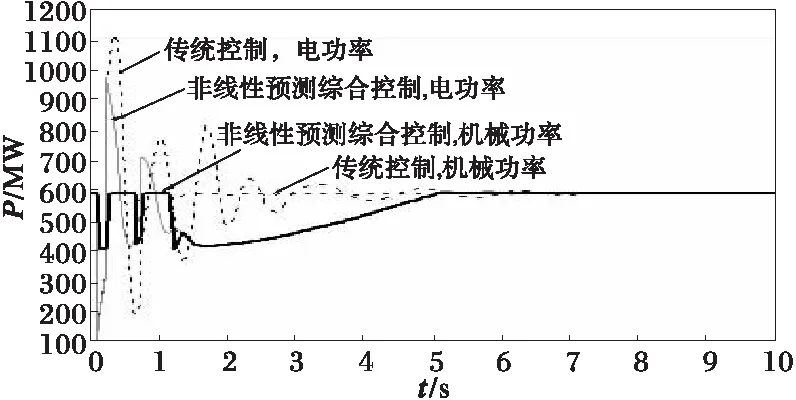
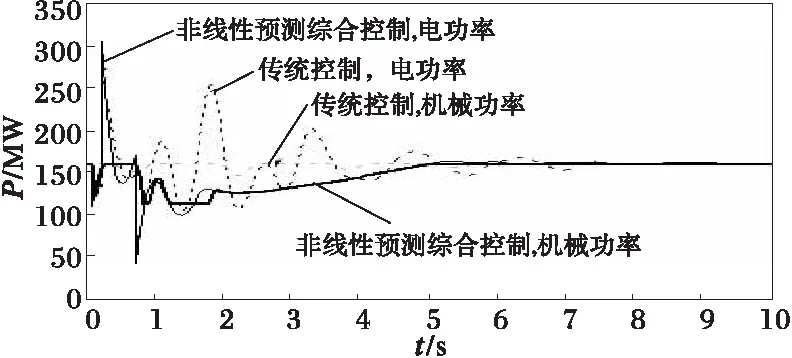
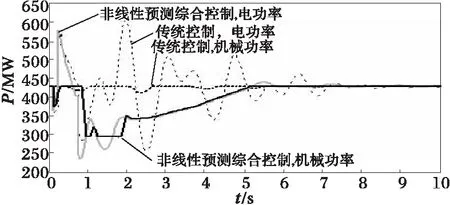
(c) 2#機組電功率和機械功率
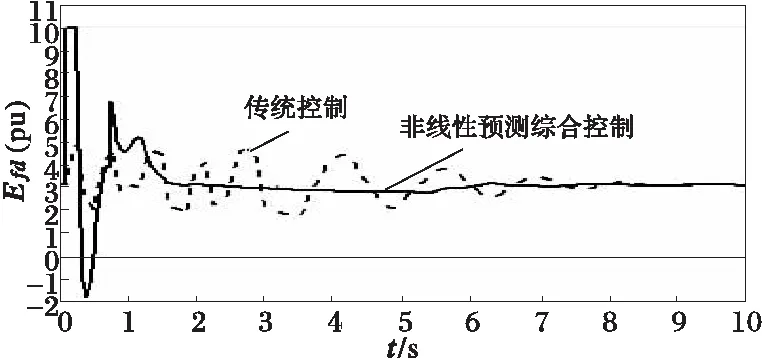
(d) 2#機組勵磁電壓
(a) 3#機組功角響應曲線

(b) 3#機組機端電壓響應曲線
(c) 3#機組電功率和機械功率
(d) 3#機組勵磁電壓

如圖2~5中功角、電磁功率及機械功率響應曲線所示,本文的控制策略能對發電機功角的第一擺有很好的抑制作用,使第一擺功角δmax的值較傳統控制方案減少(以2#機組為例,在傳統控制方案和本文控制方案下,功角第一擺的最大值分別為δmax=70.73°與δmax=44.36°),顯然有利于暫態穩定性的提高。對機組的動態穩定也表現有很好阻尼作用,使系統盡快達到穩定狀態。這可從圖中各機組的機械、電氣功率變化曲線得到說明,當發生故障時,發電機輸出的電磁功率Pei將急劇減少,采用本文提出的控制器來調節主汽門開度,可有效地使發電機的機械輸入功率減少,從而使發電機轉子獲得的加速功率減少,則功角δi的最大偏移將減小,提高了其暫態穩定性。隨后,由于輸入的機械功率能很好跟隨發電機輸出的電磁功率的變化,從而有效地阻尼了系統功率振蕩,使系統盡快進入穩定狀態。這得益于發電機組汽門開度的控制充分利用了當地機組豐富的變量信息,遠優于傳統調速系統控制器的單一轉速增量Δωi作為控制輸入信息。
(a) 4#機組功角響應曲線
(b) 4#機組機端電壓響應曲線
(c) 4#機組電功率和機械功率
(d) 4#機組勵磁電壓
(a) 5#機組功角響應曲線
(b) 5#機組機端電壓響應曲線
(c) 5#機組電功率和機械功率
(d) 5#機組勵磁電壓
5 結語
針對對具有靜止勵磁方式和電液調速器的中間再熱式汽輪發電機組,本文設計一種具有解析解控制律的發電機綜合控制器。該控制器避免了非線性預測控制需在線滾動優化計算帶來的大量計算負擔和由此引起算法的穩定性問題,且控制器所有輸入信號都是當地測量的,可實現分散控制。通過對一多機電力系統的仿真結果表明,與傳統AVR勵磁調節器、PSS及PID調速器相比,該綜合控制器能有效地提高系統的暫態穩定性并能得到更好的動態響應特性和維持機端電壓的調節精度。
[1] Guo G, Wang Y,Lim K Y,etal. Robust nonlinear controller for power system transient stability enhancement with voltage regulation[J]. IEE Proceedings: Generation, Transmission and Distribution, 1996, 143(5): 407-412.
[2] 葛友,李春文,孫政順(Ge You, Li Chunwen, Sun Zhengshun).逆系統方法在電力系統綜合控制中的應用(Application of inverse system method for power system integrated control)[J]. 中國電機工程學報(Proceedings of the CSEE), 2001,21(4):1-4,10.
[3] 王冰,季海波,陳歡,等(Wang Bing, Ji Haibo, Chen Huan,etal).汽輪發電機勵磁與汽門協調無源性控制(The coordinated passivity techniques for the excitation and steam-valving control of generator)[J]. 中國電機工程學報(Proceedings of the CSEE), 2004,24(5):104-109.
[4] 戴先中,張騰,張凱鋒, 等(Dai Xianzhong, Zhang Teng, Zhang Kaifeng,etal). 發電機勵磁與汽門系統解耦控制的神經網絡逆系統方法(Ann-inverse based decoupling control of excitation and valve system for turbogenerator )[J]. 中國電機工程學報(Proceedings of the CSEE), 2002,22(11):75-80.
[5] 李志民,盧曦,孫勇,等(Li Zhiming, Lu Xi, Sun Yong,etal).同步發電機云模型勵磁控制器的設計(Design of cloud model excitation controller for synchronous generator) [J]. 電力系統及其自動化學報(Proceedings of the CSU-EPSA),2010,22(3): 91-95.
[6] 李基成.現代同步發電機勵磁系統設計及應用[M].北京: 中國電力出版社,2002.
[7] 王偉.廣義預測控制理論及其應用 [M].北京: 科學出版社, 1998.
[8] Barreiros J A L, e Silva A S, Simoes Costa A J A. A self-tuning generalized predictive power system stabilizer[J].International Journal of Electrical Power and Energy System, 1998, 20(3): 213-219.
[9] Ghazizadeh M S, Saidy M, Hughes F M. Predictive analogue generator excitation controller[J]. IEE Proceedings: Generation, Transmission and Distribution, 1997, 144(3): 271-278.
[10]Marinescu Bogdan, Bourles Henri. Robust predictive control for the flexible coordinated secondary voltage control of large-scale power systems[J]. IEEE Trans on Power Systems, 1999,14(4): 1262-1268.
[11]Rajkumar V, Mohler R R. Bilinear generalized predictive control using the thyristor-controlled series-capacitor[J]. IEEE Trans on Power Systems, 1994,9(4): 1987-1993.
[12]盧強,孫元章.電力系統非線性控制 [M].北京: 科學出版社,1993.
[13]Kundur P. Power System Stability and Control [M]. Beijing: China Electric Power Press, 2001.
[14]Chen Wen-Hua. Closed-form nonlinear MPC for multivariable nonlinear systems with different relative degree[C]∥The American Control Conference, Denver, USA: 2003.
[15]Chen Wen-Hua, Ballance Donald J, Gawthrop Peter J. Optimal control of nonlinear systems: a predictive control approach [J]. Automatica, 2003, 39(4): 633-641.
[16]Lu Qiang, Sun Yuanzhang, Mei Shengwei. Nonlinear Control Systems and Power System Dynamics[M]. Boston: Kluwer Academic Publishers, 2001.
DesignedofNonlinearOptimalPredictiveIntegratedControlforTurbine-generator
JIANG Tie-zheng
(College of Electrical Engineering, Changsha University of Science and Technology, Changsha 410114, China)
A nonlinear integrated controller with analytic solution control regulation for turbine-generators with static excitation and electric-hydraulic transducer is presented, on the basis of multi-input multi-output (MIMO) nonlinear predictive control theory. The advantage of the control scheme is no requirement for on-line optimization, thus the huge calculation burden and control arithmetic stability can be avoided, so demanding of real-time control can be satisfied. The input signals for the proposed controller are local measured and independent of the system parameters, and two design parameters which are the predictive period and control order. The simulation results of a multi-machine power system have shown that the controller can greatly improve power system stability and maintain terminal voltage of turbine-generators.
multi-input multi-output nonlinear system; predictive control; power system stability
2010-08-24;
2010-11-11
湖南省教育廳資助科研項目(08C086)
TM761
A
1003-8930(2011)06-0029-07
蔣鐵錚(1965-),男,博士,副教授,研究方向為電力系統穩定分析與非線性控制。Email:jiangtiezheng@163.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
故事作文·高年級(2021年12期)2021-12-21 02:32:35
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30