制導(dǎo)彈箭捷聯(lián)慣組在架標(biāo)定方案研究*
2011-10-19 12:46:30游金川秦永元楊鵬翔嚴(yán)恭敏
傳感技術(shù)學(xué)報 2011年7期
游金川,秦永元,楊鵬翔,嚴(yán)恭敏
(西北工業(yè)大學(xué)自動化學(xué)院,西安 710129)
隨著慣性器件技術(shù)的日漸成熟和成本的降低,常規(guī)無控或簡控彈箭紛紛通過加裝戰(zhàn)術(shù)級精度激光或光纖陀螺捷聯(lián)慣導(dǎo)系統(tǒng)(SINS)進行制導(dǎo)化改造[1-2]。在工程實踐中,長時間整彈存儲的制導(dǎo)彈箭,由于諸多因素的影響,其捷聯(lián)慣組(SIMU)的模型參數(shù)相對先前實驗室標(biāo)定值將產(chǎn)生較大的變化,使系統(tǒng)無法滿足對準(zhǔn)和導(dǎo)航精度要求。目前,通常的解決方法是,定期(如一年)將SIMU從彈上拆卸下來,利用精密轉(zhuǎn)臺重新標(biāo)定。這種標(biāo)定方法雖然能保證高的標(biāo)定精度,但工作量大,成本高,給系統(tǒng)維護帶來很多麻煩。
為了實現(xiàn)彈載SIMU的免拆卸標(biāo)定,Pittman D N等[3-4]設(shè)計了一種對 SIMU添加雙軸環(huán)架的方案。導(dǎo)彈發(fā)射前,利用雙軸環(huán)架對SIMU進行固定角度的轉(zhuǎn)位(三次雙位置轉(zhuǎn)動,第二位置相對第一位置經(jīng)歷兩次正交旋轉(zhuǎn)),然后從SINS靜態(tài)導(dǎo)航位置誤差中估計出對準(zhǔn)失準(zhǔn)角和器件漂移,從而實現(xiàn)SIMU的自標(biāo)定。而 Gilmore Jerold P 等[5-6]利用三個雙自由度動調(diào)陀螺儀構(gòu)成冗余慣導(dǎo)系統(tǒng),通過周期性的依次反轉(zhuǎn)三個動調(diào)陀螺的永磁電機角動量矢量的方向,實現(xiàn)對飛輪的反向控制。這相當(dāng)于不需要機械環(huán)架實現(xiàn)對陀螺的180度轉(zhuǎn)位,從而實現(xiàn)對冗余陀螺的實時標(biāo)定,而且不影響整套系統(tǒng)的正常導(dǎo)航,但該方案并不適合單自由度光學(xué)陀螺構(gòu)造的慣導(dǎo)系統(tǒng)。文獻[7]提出對激光陀螺SIMU進行水平轉(zhuǎn)位,實現(xiàn)雙位置對準(zhǔn)和元件誤差自標(biāo)定,但該方案仍需要將SIMU從彈上拆除,且沒有考慮器件中刻度系數(shù)誤差的影響。文獻[8-9]提出利用一套精度較高的SIMU來對存放時間較久的SIMU進行標(biāo)定,通過六位置轉(zhuǎn)動進行誤差參數(shù)標(biāo)定。但該方案需要加工精度較高的包裝箱或發(fā)射筒,工程中較難實現(xiàn)。文獻[10]則對利用導(dǎo)彈水平、豎直和其他起豎位置來標(biāo)定SIMU的可行性進行了分析,提出利用發(fā)射車從倉庫到達發(fā)射點過程中停車位置的信息來輔助在線標(biāo)定。
另一方面,利用低精度轉(zhuǎn)臺的旋轉(zhuǎn)來實現(xiàn)對SIMU的標(biāo)定已成為近年來學(xué)界研究的熱點之一[11-13]。其核心思想是以SIMU的陀螺來跟蹤轉(zhuǎn)臺角運動而不依賴于轉(zhuǎn)臺自身的轉(zhuǎn)位精度,利用SINS輸出的速度誤差信息來實現(xiàn)對SIMU的標(biāo)定。在此基礎(chǔ)上,本文以某型傾斜式發(fā)射制導(dǎo)彈箭武器系統(tǒng)為應(yīng)用背景,對利用發(fā)射架機動代替低精度轉(zhuǎn)臺轉(zhuǎn)動,進而實現(xiàn)制導(dǎo)彈箭SIMU在架標(biāo)定的方案進行了研究。
1 彈載捷聯(lián)慣導(dǎo)系統(tǒng)誤差模型
1.1 捷聯(lián)慣組誤差模型
在進行SIMU在架標(biāo)定過程中,將用到如下坐標(biāo)系:i系:慣性坐標(biāo)系,相對慣性空間靜止的坐標(biāo)系;e系:地理坐標(biāo)系,選取標(biāo)定所在地的東北天方向作為地理坐標(biāo)系;n系:導(dǎo)航坐標(biāo)系,選取標(biāo)定所在地東北天方向的地理坐標(biāo)系作為導(dǎo)航坐標(biāo)系;b系:載體坐標(biāo)系,即彈載子慣導(dǎo)坐標(biāo)系,選取彈載SIMU的右前上方向作為載體坐標(biāo)系;bm系:發(fā)射架坐標(biāo)系,即主慣導(dǎo)坐標(biāo)系。在制導(dǎo)彈箭武器系統(tǒng)中,車載定位定向系統(tǒng)安裝在發(fā)射架上,選取定位定向系統(tǒng)的右前上方向作為發(fā)射架坐標(biāo)系。當(dāng)定位定向系統(tǒng)中的高精度慣導(dǎo)系統(tǒng)(主慣導(dǎo))與彈載捷聯(lián)慣導(dǎo)系統(tǒng)(子慣導(dǎo))平行安裝時,b系的姿態(tài)與bm系姿態(tài)完全相同;當(dāng)主子慣導(dǎo)系統(tǒng)間存在安裝誤差時,如果直接用主慣導(dǎo)姿態(tài)初始化子慣導(dǎo)姿態(tài),將引入子慣導(dǎo)的初始姿態(tài)誤差。本文先不考慮主子慣導(dǎo)系統(tǒng)間的安裝誤差以進行公式推導(dǎo),而在文末對其影響進行討論和處理。
對于長時間整彈存儲的制導(dǎo)彈箭,由于不對其彈載SIMU進行拆卸,僅利用發(fā)射架的有限機動,相對其庫存前標(biāo)定結(jié)果進行修正,其標(biāo)定誤差模型需要進行簡化,忽略穩(wěn)定性相對較好的陀螺和加計的失準(zhǔn)角誤差系數(shù)[14],則陀螺和加計的誤差模型可分別寫為:

1.2 捷聯(lián)慣導(dǎo)系統(tǒng)簡化誤差方程
捷聯(lián)慣導(dǎo)系統(tǒng)的速度和姿態(tài)誤差微分方程表示為[15-16]:
經(jīng)過桿臂效應(yīng)補償后,在架標(biāo)定過程中的SIMU相對地球只有角運動,而沒有線運動,故vn==0,
而且在進行在架標(biāo)定時,當(dāng)?shù)氐牡乩砭暥瓤梢酝ㄟ^GPS精確測得,可認(rèn)為δL=0,在保證姿態(tài)誤差角為小角的條件下,其與地球自轉(zhuǎn)角速度的乘積項可忽略,則用于SIMU在架標(biāo)定的速度和姿態(tài)誤差微分方程可簡化為:
2 捷聯(lián)慣導(dǎo)系統(tǒng)在架標(biāo)定方案
從式(5)和式(6)可見,SINS的速度誤差變化率和姿態(tài)誤差變化率是SIMU器件誤差的函數(shù)。不同于通常求解微分方程的系統(tǒng)級標(biāo)定方案,本方案僅利用發(fā)射架機動前后SINS的速度誤差變化率構(gòu)造代數(shù)方程來求解陀螺和加計的誤差參數(shù)。這將使得標(biāo)定過程的計算量大為降低。
由式(5)可知,機動前后的速度誤差變化率可分別表示為:
設(shè)機動前SINS姿態(tài)誤差初值為φ0,機動后的姿態(tài)誤差為φ=φ0+Δφ,因此,

當(dāng)發(fā)射架以較快角速度機動時,在較短的機動時間內(nèi)(不超過10 s),由陀螺隨機常值漂移引起的姿態(tài)誤差變化量完全可以忽略,則上式可進一步簡化為
式(9)、式(12)、式(13)即是本標(biāo)定方案的基本方程。
在選取機動方案時,盡量只激勵較少的誤差參數(shù),以避免不同參數(shù)間的相互干擾。為了使式(12)積分相對簡單,也為了弄清基本機動對誤差參數(shù)的激勵關(guān)系,我們只考慮發(fā)射架繞單軸旋轉(zhuǎn)機動條件下速度誤差變化率的變化量與SIMU誤差參數(shù)的關(guān)系。
2.1 單俯仰機動
設(shè)彈載SINS的初始姿態(tài)為[0 0 0]T,發(fā)射架只進行繞俯仰軸的機動,末了姿態(tài)為[θ 0 0]T,則一次單俯仰機動引起的速度誤差變化率的變化量為

2.2 單偏航運動
工程中,制導(dǎo)彈箭發(fā)射架的偏航機動只能在發(fā)射架先完成俯仰機動,達到一定俯仰角度(如θ0)并穩(wěn)定后,才能單獨進行。因此設(shè)彈載SINS初始姿態(tài)為[θ00 0]T,定義偏航角北偏東為正,繞n系-zn軸旋轉(zhuǎn),末了姿態(tài)為[θ00 ψ]T,則一次偏航機動引起的速度誤差變化率的變化量為

2.3 單橫滾運動
為了標(biāo)定SIMU縱向軸陀螺誤差參數(shù),需要對彈載SIMU進行橫滾機動,因此只利用發(fā)射架的俯仰和偏航機動無法實現(xiàn)對其有效激勵,因此可以考慮對彈載SIMU添加一個橫滾環(huán)架使其能繞縱軸旋轉(zhuǎn),專門進行標(biāo)定。對于利用橫滾隔離環(huán)進行載體橫滾解耦的制導(dǎo)彈箭,則可利用該環(huán)進行伺服旋轉(zhuǎn)實現(xiàn)SIMU標(biāo)定。因此,不妨設(shè)彈載SINS初始姿態(tài)為[0 0 0]T,定義橫滾角右傾為正,繞b系yb軸旋轉(zhuǎn),末了姿態(tài)為[0 γ 0]T,則一次橫滾機動引起的速度誤差變化率的變化量為

從式(16)可以看出,橫滾機動可以激勵4個加計參數(shù)和1個陀螺參數(shù),能標(biāo)定的參數(shù)或參數(shù)組合為 δkgyy、(δkaxx-δkazz)、、。同樣,在完成發(fā)射架單俯仰和單偏航機動條件下,只需一組橫滾機動即可標(biāo)定 δkgyy和(δkaxx-δkazz)。
3 標(biāo)定方案仿真及分析
現(xiàn)將式(14)、式(15)和式(16)可激勵參數(shù)統(tǒng)一列表如表1所示。
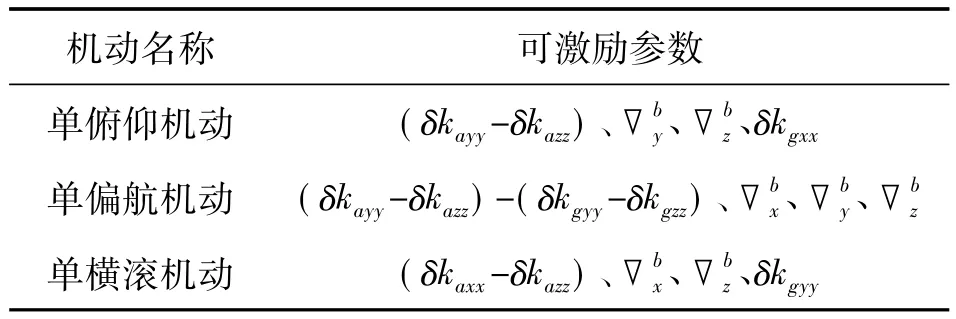
表1 發(fā)射架激勵與可標(biāo)參數(shù)關(guān)系表
數(shù)學(xué)仿真參數(shù)設(shè)置如下
當(dāng)不考慮陀螺隨機常值漂移和初始姿態(tài)誤差時,仿真中的發(fā)射架機動過程描述如下:發(fā)射架在初始姿態(tài)位置靜止10 s,然后進行10 s的勻角速度單軸機動,然后再靜止10 s。其中俯仰機動共進行兩次,初始姿態(tài)為[0° 0° 0°]T,末了俯仰角分別以θ1、θ2表示;在一定俯仰角(以 θ0表示)基礎(chǔ)上進行偏航機動一次,即初始姿態(tài)為[θ00°0°]T,末了姿態(tài)為[θ00°ψ]T;如果彈載SIMU可以通過內(nèi)部標(biāo)定環(huán)實現(xiàn)橫滾機動,則增加一次橫滾機動,即初始姿態(tài)為[0° 0° 0°]T,末了姿態(tài)為[0°γ 0°]T。
仿真中彈載SIMU中陀螺和加計的輸出頻率是100 Hz,導(dǎo)航信息輸出頻率是10 Hz。由于發(fā)射架沒有線運動,因此在扣除慣導(dǎo)的桿臂速度后,彈載慣導(dǎo)輸出的速度信息就是速度誤差信息,因此,使用發(fā)射架機動后1 s(20 s~21 s)和機動前1 s(9 s~10 s)的彈載慣導(dǎo)速度誤差相減,就得到機動前后慣導(dǎo)速度誤差變化率的變化量,從而得到一組量測數(shù)據(jù)。由于俯仰機動只能激勵4個參數(shù),因此,理論上只需兩次零初始姿態(tài)條件的不同俯仰角機動就可完成標(biāo)定。再加上一次偏航機動得到的一組量測數(shù)據(jù),就可構(gòu)造6個等式的方程組,從而對6個參數(shù)進行標(biāo)定。如果可進行一次橫滾機動的話,就可以構(gòu)造8個等式的方程組,從而對8個參數(shù)進行標(biāo)定。現(xiàn)將仿真結(jié)果列表如表2所示。
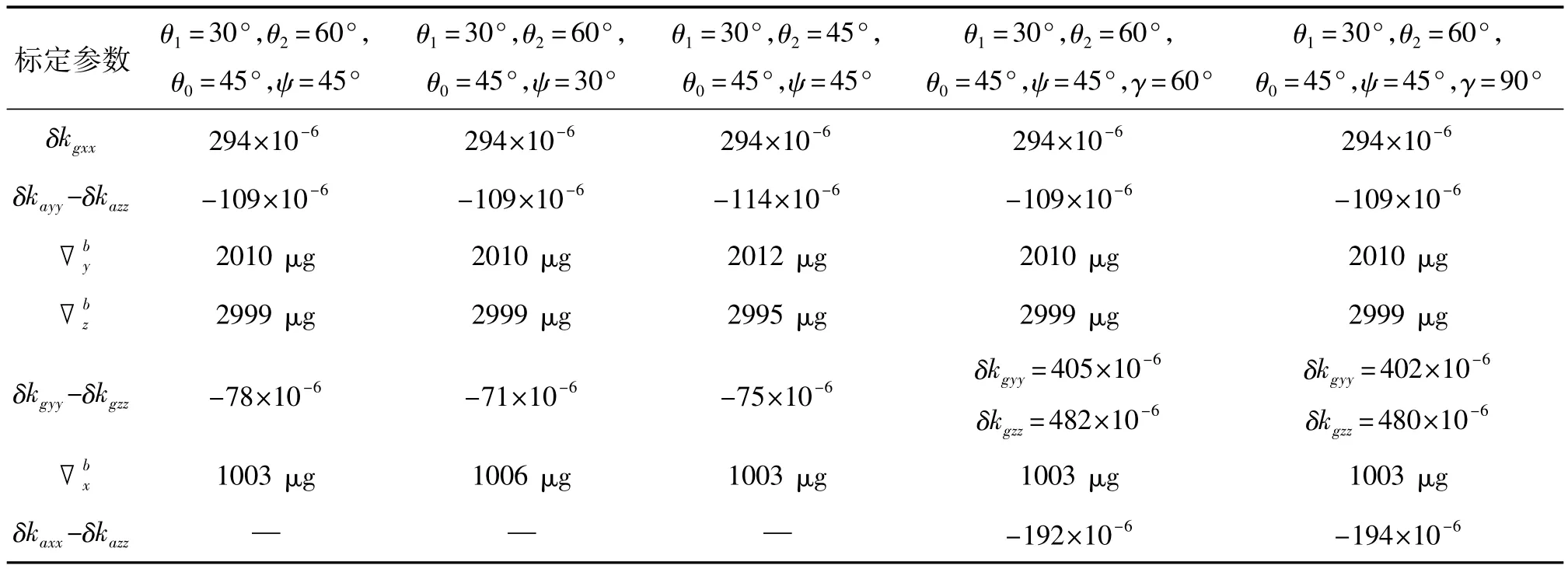
表2 在架標(biāo)定仿真結(jié)果
通過比較不同的機動方式可以得出,在零初始姿態(tài)和忽略陀螺隨機常值漂移條件下,只需要進行兩次俯仰機動即可實現(xiàn)對上表前四行參數(shù)的標(biāo)定,增加一次具有俯仰角基礎(chǔ)上的偏航機動,即可實現(xiàn)對上表前六行參數(shù)的標(biāo)定。偏航機動對前四行參數(shù)標(biāo)定結(jié)果幾乎沒有影響,這反映了俯仰機動和偏航機動對參數(shù)激勵的相對獨立。在相同的機動時間內(nèi),俯仰角越大和偏航角越大,誤差參數(shù)的標(biāo)定精度越高。在無橫滾機動的條件下,δkgyy、δkgzz無法分離,且誤差相對較大。在增加橫滾機動條件下,δkgyy、δkgzz可以有效分離,且估計精度較高。在三種角機動條件下,加計刻度系數(shù)誤差都不能有效分離,這反映了在其對速度誤差變化率變化量的影響方式相同,因此還需要進一步的約束條件才能實現(xiàn)參數(shù)分離。
4 討論
該標(biāo)定方案利用機動前后速度誤差變化率的變化量對捷聯(lián)慣導(dǎo)主要參數(shù)進行在架標(biāo)定。理論上,單軸機動所激勵的參數(shù)越少越好(如通過轉(zhuǎn)動90°或180°等特殊角度),這樣可以避免不同參數(shù)的相互干擾。但在工程實際中,發(fā)射架的機動角度有限,不可避免多個參數(shù)相互影響,這就需要進行多次單軸機動,對其測量利用最小二乘等方法求解。考慮到發(fā)射架的機動精度達角秒級,因此可以不考慮運動誤差對標(biāo)定精度的影響;如果發(fā)射架機動精度不高,還可利用最小二乘平差和多次迭代標(biāo)定等技術(shù)來提高參數(shù)的標(biāo)定精度。
同時,由于本標(biāo)定方案忽略了地球自轉(zhuǎn)角速度、陀螺漂移誤差和彈載慣導(dǎo)的初始姿態(tài)誤差(即相對發(fā)射架主慣導(dǎo)的安裝誤差)的影響,因此需要對這些誤差因素的影響進行說明。
4.1 陀螺漂移殘差的影響
仿真中,當(dāng)SIMU存在較大陀螺隨機常值漂移時,該標(biāo)定方案將失效。其原因是標(biāo)定方案推導(dǎo)過程中,假定陀螺漂移變化不大,從而采用原有陀螺漂移標(biāo)定值對姿態(tài)誤差變化量的影響可忽略,見式(11)。因此不僅不能利用本方案對陀螺漂移殘差進行標(biāo)定,相反,如果陀螺漂移殘差較大時,需要采用其他方法先對該殘差進行估計和補償,如可通過在近似零初始姿態(tài)條件,靜止?fàn)顟B(tài)下陀螺輸出的角速度信息減去已知的地球自轉(zhuǎn)角速度來近似,再對原有陀螺漂移標(biāo)定值進行補償或采用姿態(tài)匹配傳遞對準(zhǔn)方法對該殘差進行估計和補償。而仿真表明,對于在δe=0.5°/h量級的陀螺漂移殘差,可以通過提高發(fā)射架機動角速度來有效抑制其對標(biāo)定結(jié)果的影響。
4.2 安裝誤差角的影響
從式(12)看,彈載慣導(dǎo)的初始姿態(tài)誤差對姿態(tài)誤差變化量沒有影響,但如果存在較大的初始姿態(tài)誤差,再與本是小量的地球自轉(zhuǎn)角速度耦合,將對姿態(tài)誤差變化量造成較大的影響,導(dǎo)致標(biāo)定方案的失效。因此,對于較大的主子慣導(dǎo)間的安裝誤差角,需要先利用GMLRS發(fā)射架上裝配的高精度定位定向系統(tǒng)對彈載子慣導(dǎo)進行姿態(tài)匹配傳遞對準(zhǔn),估計出主子慣導(dǎo)的安裝誤差角,從而可有效補償子慣導(dǎo)的初始姿態(tài)誤差。已有文獻[17-18]驗證該對準(zhǔn)方案的對準(zhǔn)精度在δφ=1 mrad量級,因此補償后的彈載慣導(dǎo)初始姿態(tài)誤差對本方案標(biāo)定結(jié)果的影響也能忽略。
5 結(jié)論
本文以制導(dǎo)彈箭武器系統(tǒng)為應(yīng)用背景,當(dāng)不考慮陀螺隨機常值漂移變化量和初始姿態(tài)誤差時,詳細(xì)推導(dǎo)了在發(fā)射架有限機動條件下,速度誤差變化率的變化量與捷聯(lián)慣組誤差參數(shù)的關(guān)系。為了標(biāo)定縱向陀螺刻度系數(shù)誤差需要利用橫滾隔離環(huán)進行輔助機動。同時,當(dāng)存在較大的陀螺隨機常值漂移誤差和初始姿態(tài)誤差時,需要先對其進行補償再利用本方案進行標(biāo)定。仿真結(jié)果驗證了該方案的有效性,這為制導(dǎo)彈箭捷聯(lián)慣組提供了一種免拆卸標(biāo)定的參考方案。
[1]Gamble A E,Jenkins P.Low Cost Guidance for the Multiple Launch Rocket System(MLRS)Artillery Rocket[J].IEEE AES Systems,2001,16(1):33-39.
[2]High Mobility Artillery Rocket System(HMARS)Program Overview http://www.army-technology.com/projects/himars/
[3]Pittman D N,Roberts C E.Determining Inertial Errors from Navigation-in-Place Data[C]//Position Location and Navigation Symposium,1992.Record.500 Years After Columbus-Navigation Challenges of Tomorrow.IEEE PLANS’92.,IEEE,1992:60-67.
[4]Pittman D N,Lanier N C,LeFevre V C.Integration and Testing of a Low-Cost Land Navigator for the Army Combined Arms Weapon System(TACAWS)[C]//Position Location and Navigation Symposium,1996.,IEEE,1996:399-406.
[5]Gilmore J P,Musoff H.A Unique Self-Calibrating Redundant Inertial System[C]//Position Location and Navigation Symposium,1992.Record.500 Years After Columbus-Navigation Challenges of Tomorrow.IEEE PLANS’92.,IEEE,1992:46-51.
[6]Howard Musoff,Jerold P Gilmore.Inertial Navigation System with Automatic Redundancy and Dynamic Compensation of Gyroscope Drift Error[P].united states patent.5194872.1993-3-16.
[7]吉翠萍,雷宏杰,陳璞,郭創(chuàng).激光陀螺捷聯(lián)慣導(dǎo)系統(tǒng)元件誤差自標(biāo)定技術(shù)[J].火力與指揮控制,2006,31(11):15-17.
[8]卿立,李海強.一種中低精度捷聯(lián)慣測裝置的不開箱標(biāo)定方法研究[J].中國慣性技術(shù)學(xué)報,2004,12(4):16-19.
[9]李海強,詹麗娟,卿立.捷聯(lián)慣性測量裝置在整彈上的標(biāo)定方法研究[J].戰(zhàn)術(shù)導(dǎo)彈控制技術(shù),2006,53:32-36,58.
[10]祝燕華,劉建業(yè),孫永榮,華冰.導(dǎo)彈射前慣測組件誤差在線標(biāo)定方案研究[J].系統(tǒng)工程與電子技術(shù),2007,29(4):618-621.
[11]Robert M Rogers.Applied Mathematics in Integrated Navigation Systems[M].second edition,Reston:AIAA,2003.
[12]婁曉芳,譯.捷聯(lián)慣性導(dǎo)航系統(tǒng)標(biāo)定方法[J].導(dǎo)航與控制,2003,2(1):75-78.
[13]嚴(yán)恭敏.車載自主定位定向系統(tǒng)研究[D].西北工業(yè)大學(xué),2006:43-47.
[14]Morris M Kuritsky,Murray S Goldstein.Inertial Navigation[J]IEEE Proceedings of the IEEE,1983,71(10):1156-1176.
[15]秦永元.慣性導(dǎo)航[M].北京:科學(xué)出版社,2006.
[16]秦永元,張洪鉞,汪叔華.卡爾曼濾波與組合導(dǎo)航原理[M].西安:西北工業(yè)大學(xué)出版社,1998.
[17]秦永元,游金川,宋勇.傳遞對準(zhǔn)在制導(dǎo)型多管火箭中的應(yīng)用[J].壓電與聲光,2010,32(4):565-567.
[18]You Jinchuan,Qin Yongyuan,Xia Jiahe,et al.Transfer Alignment Design and Experiment Evaluation of the SINS for GMLRS Artillery Rocket[C]//6th Int.Symp.on Precision Engineering Measurements& Instrumentation,Hangzhou,China,2010.
