基于滅點(diǎn)查找的姿態(tài)角測量方法在路面三維重建中的應(yīng)用*
2011-10-19 12:46:56楊云濤趙立雙向仁強(qiáng)
傳感技術(shù)學(xué)報(bào) 2011年7期
曹 毓,馮 瑩,楊云濤,趙立雙,向仁強(qiáng),許 偉
(1.國防科學(xué)技術(shù)大學(xué)光電科學(xué)與工程學(xué)院,長沙 410073;2.第20軍炮兵旅,河南 確山 463200)
基于多傳感器信息融合的路面三維重建技術(shù)廣泛應(yīng)用于高速公路及機(jī)場跑道等路面損毀狀況的自動檢測領(lǐng)域。在道路快速維修能力建設(shè)中,毀傷程度評估是基礎(chǔ)中的基礎(chǔ)。傳統(tǒng)的道路毀傷評估主要依賴人工目視測量的方式來完成,精度低、速度慢。為此我們采用了一種自動測量方法:將單線式激光掃描儀安裝于車輛上,在車輛行駛過程中對路面進(jìn)行不間斷掃描,從而獲得道路三維形貌。
根據(jù)車輛運(yùn)動過程中對應(yīng)的三個歐拉角(航向角、俯仰角和橫滾角)性質(zhì)的不同,現(xiàn)有的角度測量傳感器可分為航向角傳感器(電子羅盤)和傾角傳感器,前者應(yīng)用于航向角的測量,后者可以用來測量相對于水平面的傾角變化量。理論計(jì)算和實(shí)驗(yàn)證明:在實(shí)際應(yīng)用中由于車輛轉(zhuǎn)彎避障的需要,三個歐拉角中的航向角變化幅度較大,對路面三維重建效果影響也最大。目前廣泛應(yīng)用的航向角傳感器原理大都是基于地磁場方向來判斷角度變化量,因此它的精度不高,對使用環(huán)境的磁場穩(wěn)定性要求也較為苛刻。為此,我們結(jié)合使用相機(jī)和激光掃描儀,通過對一系列前視時序圖片中道路滅點(diǎn)坐標(biāo)的獲取來獲得車輛實(shí)時的航向角和俯仰角,以此為基礎(chǔ)來校正掃描儀得到的三維地形數(shù)據(jù),進(jìn)而準(zhǔn)確實(shí)現(xiàn)路面的三維形貌重建。實(shí)驗(yàn)結(jié)果表明,通過定位圖像中滅點(diǎn)位置的方法獲得的實(shí)時姿態(tài)角精度高,校正后的路面三維形貌與真實(shí)的路面情況實(shí)現(xiàn)了較為準(zhǔn)確的吻合。
1 查找滅點(diǎn)法獲取姿態(tài)角
空間一組平行直線在圖像平面上所成的像僅有一個交點(diǎn),即滅點(diǎn)(又稱消失點(diǎn)),它蘊(yùn)含了直線的方向信息,對滅點(diǎn)進(jìn)行分析可以得到相機(jī)的角度姿態(tài)信息。因此,滅點(diǎn)估計(jì)在視覺導(dǎo)航[1-7]、三維重建[8]、相機(jī)定標(biāo)等方面都有廣泛的應(yīng)用,是計(jì)算機(jī)視覺和光學(xué)傳感領(lǐng)域內(nèi)一個重要的研究課題。
圖1給出了圖像坐標(biāo)系與世界坐標(biāo)系之間的關(guān)系示意圖[3]。
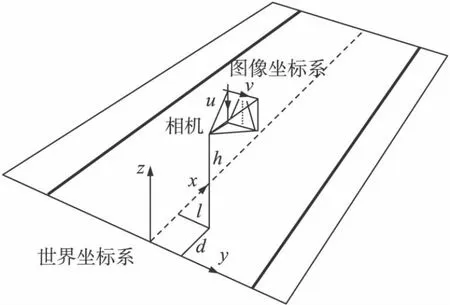
圖1 圖像坐標(biāo)系與世界坐標(biāo)系的關(guān)系示意圖
假設(shè)角度定位相機(jī)在世界坐標(biāo)系中的位置坐標(biāo)為(l,d,h),相機(jī)分辨率為m×n像素,視場角為 2α×2β 弧度,具體參數(shù)如圖2 所示[3]。
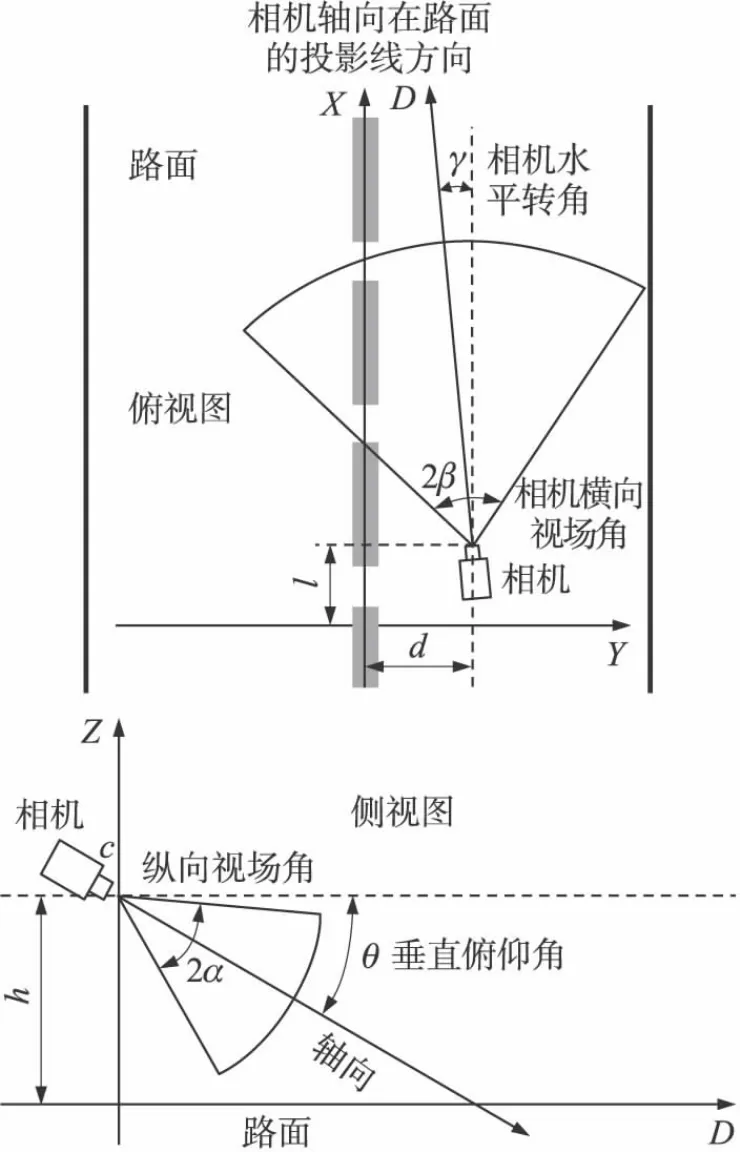
圖2 相機(jī)架設(shè)各參數(shù)示意圖
根據(jù)圖1和圖2的參數(shù)標(biāo)示,可以解算出世界坐標(biāo)系下的路面坐標(biāo)(x,y,0)與圖像坐標(biāo)系下的圖像坐標(biāo)(u,v)之間的關(guān)系,由式(1)給出[3-4],其中 γ為航向角,θ為俯仰角:

可以解出用路面坐標(biāo)(x,y,0)表示的圖像坐標(biāo)(u,v):
為得到世界坐標(biāo)系中前方無窮遠(yuǎn)點(diǎn)(即滅點(diǎn))在圖像坐標(biāo)系下的坐標(biāo),可令x→∞,則有:

從式(3)中可以發(fā)現(xiàn),在相機(jī)分辨率和視場角等內(nèi)參數(shù)一定的情況下,滅點(diǎn)的縱坐標(biāo)和橫坐標(biāo)分別與航向角γ和俯仰角θ線性相關(guān)。因此,通過實(shí)時查找滅點(diǎn)在圖像中的位置,可以很方便的計(jì)算出相機(jī)所對應(yīng)時刻的航向角和俯仰角。
式(3)可改寫為:

由式(4)可知,相機(jī)的視場角越小、分辨率越高,圖像中滅點(diǎn)的像素坐標(biāo)隨姿態(tài)角的變化越敏感,即小視場和高分辨率的相機(jī)可以對平臺的姿態(tài)角進(jìn)行高精度測量。但是視場角越小,拍攝區(qū)域也越小,在較大角度的姿態(tài)變化(如車輛大角度轉(zhuǎn)彎)時可能拍丟道路邊緣信息。因此若要保證大范圍高精度的平臺姿態(tài)角測量,則需使用大視場鏡頭或者組合多個相機(jī)同時采集前方圖像。
為檢驗(yàn)理論分析結(jié)果,進(jìn)行了標(biāo)定相機(jī)姿態(tài)角與滅點(diǎn)位置關(guān)系的實(shí)驗(yàn)。實(shí)驗(yàn)過程如下:在道路遠(yuǎn)處中心與相機(jī)等高位置(即滅點(diǎn)處)設(shè)置一合作目標(biāo)。相機(jī)固定架設(shè)于經(jīng)緯儀上,以小角度分別沿水平和垂直方向轉(zhuǎn)動,每轉(zhuǎn)動一個角度拍攝一張照片,對這些照片利用模板匹配的方法查找到合作目標(biāo)中心在圖像中的坐標(biāo),這樣就建立了相機(jī)姿態(tài)角變化與滅點(diǎn)坐標(biāo)之間一一對應(yīng)的關(guān)系。實(shí)驗(yàn)中通過經(jīng)緯儀對相機(jī)的姿態(tài)角進(jìn)行精確調(diào)節(jié),所用經(jīng)緯儀測角精度為1″。
實(shí)驗(yàn)中所用相機(jī)為加拿大Point Grey公司的Flea2-14S3型黑白數(shù)字相機(jī),最大分辨率1 280×960像素。鏡頭參數(shù)為16 mm/F1.6,其視場角為16°×22.5°。對鏡頭標(biāo)定結(jié)果表明:當(dāng)相機(jī)的角度沿橫向或縱向每變化1'時,對應(yīng)圖像中滅點(diǎn)的坐標(biāo)沿橫向或縱向移動約1個像素。圖3給出了相機(jī)沿圖片中心橫向或縱向移動時,相機(jī)轉(zhuǎn)過角度和滅點(diǎn)坐標(biāo)改變值之間的關(guān)系。從圖中可以看出,標(biāo)定結(jié)果與理論計(jì)算結(jié)果吻合的很好,只是在鏡頭邊緣處出現(xiàn)了一定的偏差,這主要是由于鏡頭的稍許畸變造成的。
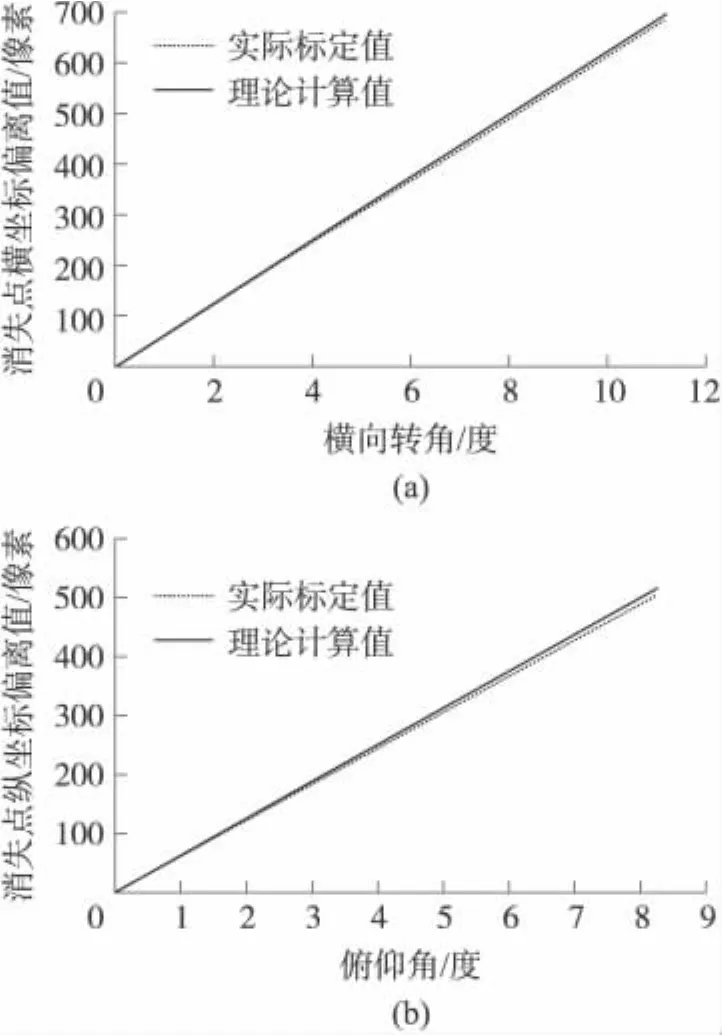
圖3 相機(jī)轉(zhuǎn)動角度和滅點(diǎn)坐標(biāo)偏離值對應(yīng)關(guān)系
為檢驗(yàn)標(biāo)定結(jié)果并測試?yán)貌檎覉D像滅點(diǎn)法檢測姿態(tài)角的精度,隨機(jī)調(diào)節(jié)經(jīng)緯儀橫向與縱向角度拍攝了6張圖片,通過Hough變換查找道路邊緣線,進(jìn)一步求解出滅點(diǎn)像素坐標(biāo)并結(jié)合標(biāo)定結(jié)果內(nèi)插得出了平臺的姿態(tài)角,將該值與從經(jīng)緯儀讀出的角度值進(jìn)行對比,得到了測角精度。詳細(xì)的實(shí)驗(yàn)數(shù)據(jù)如表1所示。
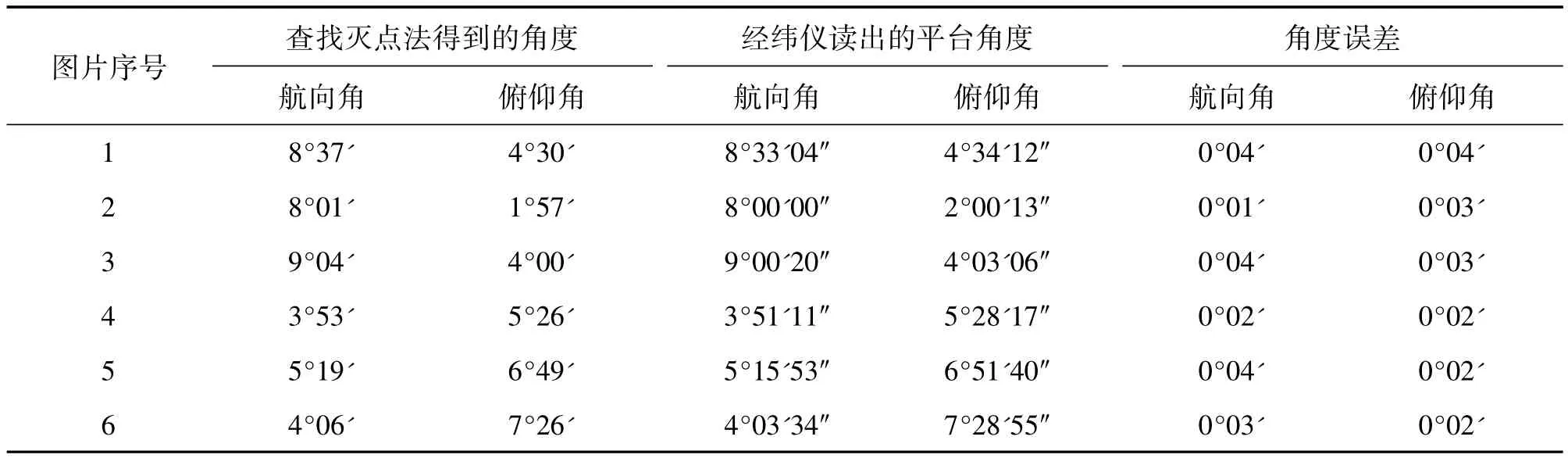
表1 角度計(jì)算值和實(shí)際值的對比分析結(jié)果
根據(jù)表1的實(shí)驗(yàn)結(jié)果,可知利用查找圖像滅點(diǎn)法測角誤差一般不超過4',因此可以認(rèn)為通過對圖像作Hough變換找直線并求解滅點(diǎn)坐標(biāo),然后根據(jù)該坐標(biāo)反解平臺角度的精度是比較高的。產(chǎn)生誤差的原因主要有三點(diǎn):一是通過Hough變換解算出的滅點(diǎn)坐標(biāo)和實(shí)際滅點(diǎn)坐標(biāo)有偏差;二是相機(jī)初始化安裝時可能并未將光軸對準(zhǔn)正前方的滅點(diǎn)位置;三是鏡頭的微小畸變導(dǎo)致圖像滅點(diǎn)坐標(biāo)與平臺角度之間并非完全的線性關(guān)系,由此產(chǎn)生了測角誤差。
2 道路三維重建系統(tǒng)
2.1 系統(tǒng)設(shè)計(jì)
我們以實(shí)驗(yàn)用手推車為運(yùn)載平臺,組合相機(jī)和激光掃描儀搭建了道路三維重建的原理驗(yàn)證系統(tǒng)。系統(tǒng)工作前,先調(diào)整相機(jī)水平向前架設(shè),將相機(jī)光軸對準(zhǔn)前方道路滅點(diǎn),并牢牢固定以保證相機(jī)的穩(wěn)定。掃描儀以向下掃描的方式架設(shè)于相機(jī)下方,為避免掃描線被車輛自身遮擋,向前有一定的仰角。圖4給出了掃描儀和相機(jī)的詳細(xì)架設(shè)位置關(guān)系。系統(tǒng)中使用的相機(jī)和鏡頭參數(shù)與前述一致;掃描儀為德國SICK公司的單線式激光掃描儀LMS-291,它的最大角度分辨率為0.25°,最大測量距離80m,最大測量角度范圍180°。系統(tǒng)在工作過程中需解決相機(jī)與掃描儀同步數(shù)據(jù)采集控制的問題。

圖4 傳感器聯(lián)合架設(shè)位置關(guān)系
2.2 實(shí)驗(yàn)及結(jié)果討論
為驗(yàn)證本文提出算法的有效性,選擇了一條平整的長直道路進(jìn)行實(shí)驗(yàn),如圖5所示。右圖即左圖進(jìn)行逆透視投影變換[3,15]變?yōu)楦┮晥D的結(jié)果。
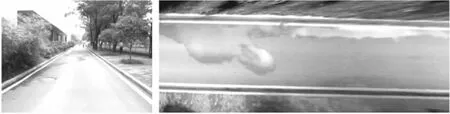
圖5 實(shí)驗(yàn)選擇的道路場景圖及俯視效果圖
從圖5中可清晰的看出該路段邊緣直線特征明顯。為檢驗(yàn)系統(tǒng)的路面三維重建效果,詳細(xì)測量了道路的三維參數(shù):路面寬4.5 m,平整度良好,路面與一側(cè)人行道落差為0.118 m,道路邊緣線直線度良好。由于現(xiàn)有一般的航向角傳感器本身精度的限制,不足以直接驗(yàn)證本文姿態(tài)角檢測算法的精度,因此我們利用了實(shí)際道路邊緣線為直線且路面與人行道有一定高差的道路三維特征,考察系統(tǒng)重建出的道路三維形貌對該特征的恢復(fù)程度,以此來評價(jià)本文算法的角度檢測精度和系統(tǒng)三維重建效果。
相機(jī)與掃描儀的數(shù)據(jù)采集和同步控制是在VC++6.0環(huán)境下編程實(shí)現(xiàn)的,掃描儀使用的是RS422串口,以500k波特率的速度傳輸數(shù)據(jù)。圖6給出了實(shí)驗(yàn)過程中相機(jī)在不同時刻采集到的前視道路圖片,依次分別為圖片序列的第0幀、100幀、200幀和300幀圖像。

圖6 相機(jī)不同時刻采集到的道路前視圖片
得到多傳感器同步采集的數(shù)據(jù)以后,編程實(shí)現(xiàn)了數(shù)據(jù)的處理和三維重建。為得到圖片中滅點(diǎn)坐標(biāo),首先需要找到道路的兩條邊緣線。程序采用形態(tài)學(xué)算法結(jié)合Hough變換檢測出道路邊線[16],進(jìn)而計(jì)算出滅點(diǎn)坐標(biāo)并最終得到姿態(tài)角。為剔除圖片中的噪聲和雜散邊緣、強(qiáng)化道路邊緣線特征,將經(jīng)過濾波和邊緣檢測等步驟預(yù)處理的圖片分別使用不同的結(jié)構(gòu)元素進(jìn)行開運(yùn)算。初始的結(jié)構(gòu)元素1和結(jié)構(gòu)元素2分別被設(shè)定為斜率1和-1的直線結(jié)構(gòu)元素,用以檢測道路左邊線和右邊線。由于車輛轉(zhuǎn)彎等原因,道路兩條邊緣線在圖片中的斜率是時刻變化的,所以不能使用一成不變的結(jié)構(gòu)元素對圖片進(jìn)行開運(yùn)算。考慮到相機(jī)幀頻為每秒15幀,相鄰兩幅圖片中道路邊緣線斜率變化不大,因此可以根據(jù)Hough變換得到的道路邊緣線的斜率,實(shí)時更新對應(yīng)斜率的直線結(jié)構(gòu)元素,為下一張圖片的邊緣線準(zhǔn)確查找打下基礎(chǔ)。程序流程如圖7所示。
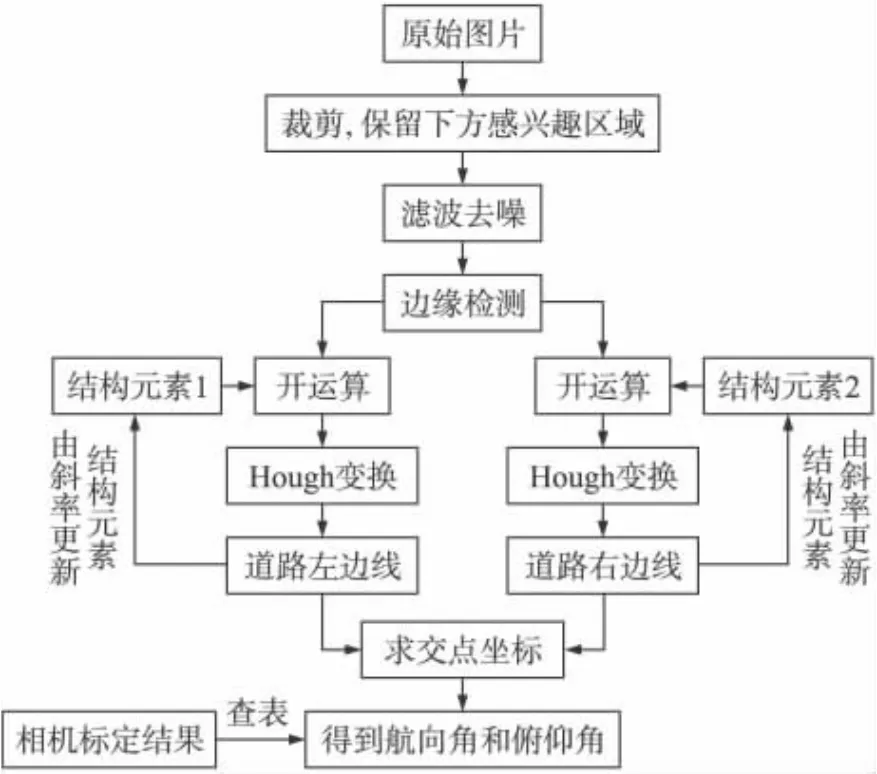
圖7 計(jì)算姿態(tài)角程序流程圖
根據(jù)以上算法,程序得到了整個實(shí)驗(yàn)過程中航向角和俯仰角隨時間的變化關(guān)系,如圖8所示,從圖中可以看出,相對于航向角而言,俯仰角在整個過程中的變化幅度小,但變化頻率較高,這是由于車輛在推動過程中的震動造成的。
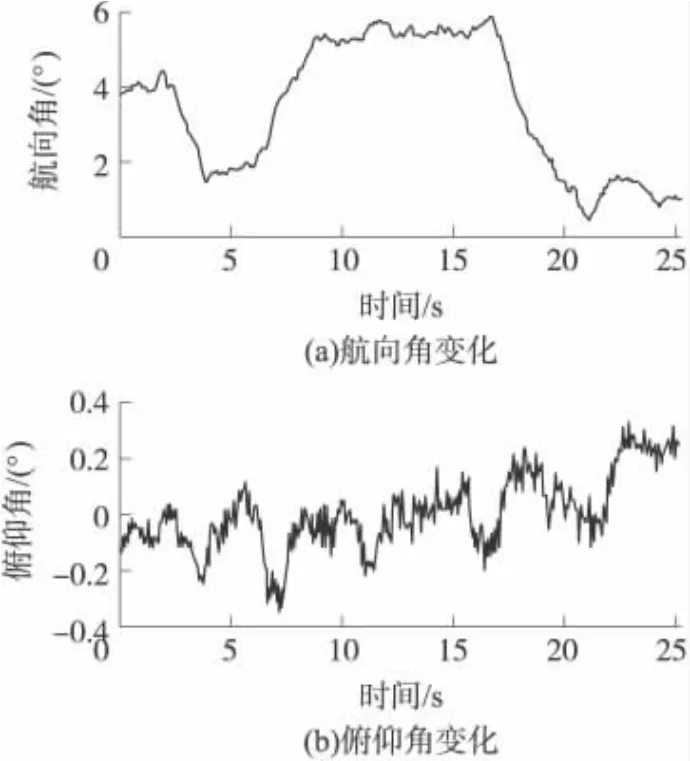
圖8 姿態(tài)角隨時間的變化關(guān)系
實(shí)驗(yàn)中我們測量了小車的平均推行速度,在假定小車一直以勻速率運(yùn)動的前提下,我們由實(shí)時的航向角變化計(jì)算出了小車的運(yùn)行軌跡,如圖9所示。圖中看到,小車在前行過程中向道路右側(cè)橫向偏離了約1 m的距離。
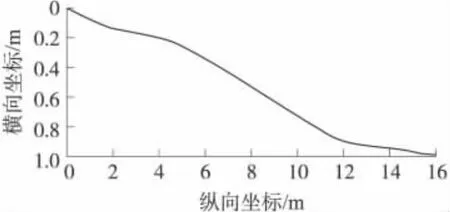
圖9 車輛行駛軌跡
圖10為掃描儀點(diǎn)云數(shù)據(jù)按車輛運(yùn)動軌跡配準(zhǔn)原理圖,為躲避障礙物(如道路上的損毀部分),車輛選擇了曲線行駛繞過障礙物,為準(zhǔn)確獲取真實(shí)場景的三維重構(gòu)結(jié)果,掃描儀的每條掃描線必須依據(jù)車輛的實(shí)時位置、航向角在世界坐標(biāo)系下進(jìn)行修正,即依據(jù)車輛運(yùn)動軌跡對掃描儀數(shù)據(jù)進(jìn)行配準(zhǔn),以保證較為精確的獲得真實(shí)場景的三維重構(gòu)結(jié)果。
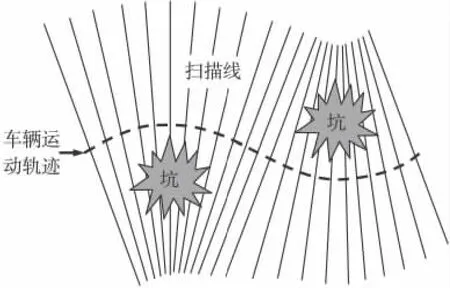
圖10 掃描儀點(diǎn)云數(shù)據(jù)按車輛運(yùn)動軌跡配準(zhǔn)原理圖
圖11給出了在沒有對掃描儀數(shù)據(jù)進(jìn)行角度姿態(tài)校正的時候重建出的道路三維形貌的俯視偽彩色圖,圖中的深色區(qū)域?yàn)槁访妫瑴\色區(qū)域?yàn)槿诵械馈Ρ葓D5可以看出,原本直線度良好的道路經(jīng)三維重建以后出現(xiàn)了明顯的扭曲失真,道路邊緣沿道路橫向的最大移位約為1 m,與車輛行駛時的最大橫向偏離距離相當(dāng)。
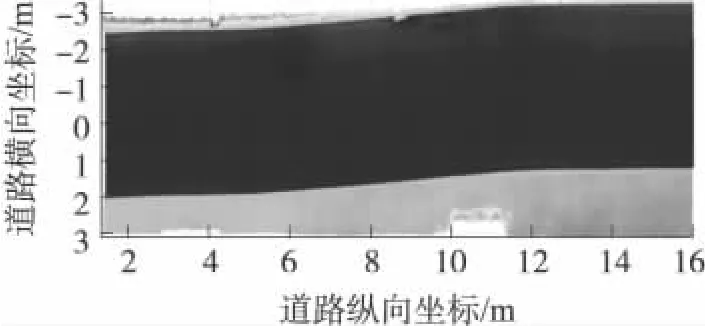
圖11 未進(jìn)行姿態(tài)校正前道路的三維重建結(jié)果俯視圖
圖12給出了經(jīng)角度姿態(tài)校正后的道路三維重建結(jié)果俯視圖,從圖中可以看出,失真現(xiàn)象得到了糾正,道路的直線特征被較好的還原出來,由重建結(jié)果的數(shù)據(jù)可得到道路邊緣線的移位小于5 cm,且道路各三維參數(shù)與實(shí)地測量值吻合的很好。因此可以認(rèn)為,由本文算法得到實(shí)時姿態(tài)角是準(zhǔn)確可靠的。

圖12 進(jìn)行姿態(tài)校正后道路的三維重建結(jié)果俯視圖
3 結(jié)論
本文分析了一種應(yīng)用于道路三維重建的姿態(tài)角測量方法。實(shí)驗(yàn)結(jié)果表明,在車輛出現(xiàn)一定的航向角和俯仰角變化的情況下,重建后的三維形貌準(zhǔn)確恢復(fù)出了實(shí)際的道路特征。在特定領(lǐng)域的應(yīng)用中,該方法是除了慣導(dǎo)系統(tǒng)和角度傳感器之外的另一種低成本高精度的姿態(tài)角測量方法。
需要說明的是,該方法的應(yīng)用領(lǐng)域存在一定的限制。例如當(dāng)?shù)缆窂澢鷩?yán)重以致不能保證路面較為平直的假設(shè)時,會導(dǎo)致滅點(diǎn)查找失敗的情況出現(xiàn);為保證車輛在以大的角度轉(zhuǎn)彎過程中不丟失圖像中的滅點(diǎn)信息,需要增加鏡頭視場角或者使用多臺相機(jī)多角度拍攝圖像。此外,受限于算法復(fù)雜度的影響,在CPU為Core2 Duo 2.8GHz的計(jì)算機(jī)平臺上,本方法目前的實(shí)時角度測量頻率僅達(dá)3 Hz~5 Hz。下一步的工作需要進(jìn)一步研究算法的優(yōu)化,從而提高實(shí)時測量頻率。
[1]毛可駿,周平,趙勻,等,基于機(jī)器視覺的自主插秧機(jī)導(dǎo)航信息的提取研究[J].農(nóng)機(jī)化研究,2009,5(5):63-66.
[2]Li Xu,Zhang Weigong,Bian Xiaodong.Research on Detection of Lane Based on Machine Vision[J].Journal of Southeast University(English Edition),2004,20(2):176-179.
[3]Massimo Bertozzi,Alberto Broggi.GOLD:A Parallel Real-Time Stereo Vision System for Generic Obstacle and Lane Detection[J].IEEE Transactions on Image Processing,1998,7(1):62-81.
[4]Massimo Bertozzi,Alberto Broggi,Alessandra Fascioli.Stereo Inverse Perspective Mapping:Theory and Applications[J].Image and Vision Computing,1998,16:585-590.
[5]李紅,柴洪林,彭嘉雄.基于滅點(diǎn)查找的無人機(jī)姿態(tài)角估計(jì)[J].華中科技大學(xué)學(xué)報(bào),2007,35(6):4-7.
[6]劉士清,胡春華,朱紀(jì)洪.一種基于滅影線的無人直升機(jī)位姿估計(jì)方法[J].計(jì)算機(jī)工程與應(yīng)用,2004,(9):50-54.
[7]蔣剛毅,郁梅.基于滅點(diǎn)查找的車道狀態(tài)估計(jì)[J].電路與系統(tǒng)學(xué)報(bào),2001,6(3):6-10.
[8]舒遠(yuǎn),談?wù)《Y儒.利用空間正交約束的相機(jī)自標(biāo)定和三維重建[J].西安交通大學(xué)學(xué)報(bào),2005,39(2):138-141.
[9]榮瑞霞,歐龍,張麗娜,等.基于滅點(diǎn)理論的普通數(shù)碼相機(jī)標(biāo)定方法[J].工程地球物理學(xué)報(bào),2007,4(2):152-156.
[10]張劍清,張勇,方芳.鉛垂線輔助城區(qū)航空影像的絕對定向[J].武漢大學(xué)學(xué)報(bào)·信息科學(xué)版,2007,32(3):197-200.
[11]馬琳,鄭南寧,李青,等.自主車輛視覺系統(tǒng)的攝像機(jī)動態(tài)自標(biāo)定算法[J].西安交通大學(xué)學(xué)報(bào),2005,39(10):1072-1076.
[12]胡釗政,談?wù)?一種基于二滅點(diǎn)的攝像機(jī)自標(biāo)定新算法[J].空間電子技術(shù),2005,(1):42-46.
[13]李青,鄭南寧,張雪濤.用三線法標(biāo)定車載攝像機(jī)的外部參數(shù)[J].光電工程,2004,31(8):23-26.
[14]謝文寒,張祖勛,張劍清.一種新的基于滅點(diǎn)的相機(jī)標(biāo)定方法[J].哈爾濱工業(yè)大學(xué)學(xué)報(bào),2003,35(11):1384-1387.
[15]鄧劍文,安向京,賀漢根.基于道路結(jié)構(gòu)特征的自主車視覺導(dǎo)航[J].吉林大學(xué)學(xué)報(bào),2004,22(4):415-419.
[16]朱彤,閻瑩,袁志業(yè).一種基于形態(tài)學(xué)變換的車道檢測方法[J].山東交通學(xué)院學(xué)報(bào),2006,14(1):13-16.
