一種基于80C51單片機控制的尋跡小車設計
2011-09-29 02:54:28彭一準姜小寶莊明加保和平
天津科技大學學報 2011年1期
彭一準,姜小寶,莊明加,保和平
(1. 天津科技大學電子信息與自動化學院,天津 300222;2. 天津大學電氣與自動化工程學院,天津 300072;3. 深圳比亞迪汽車股份有限公司,深圳 518118)
一種基于80C51單片機控制的尋跡小車設計
彭一準1,姜小寶2,莊明加3,保和平1
(1. 天津科技大學電子信息與自動化學院,天津 300222;2. 天津大學電氣與自動化工程學院,天津 300072;3. 深圳比亞迪汽車股份有限公司,深圳 518118)
尋跡小車采用光電傳感器來識別白色路面中央的黑色引導線,通過80C51單片機實現對轉向舵機和驅動電機的PWM控制,使小車實現快速穩定地尋線行駛.分模塊闡述了尋跡小車的原理、軟硬件設計及制作過程.針對路徑特點對尋跡小車的方向控制和速度控制提出了舵機分級轉向、速度分段控制的解決方案.實驗表明,尋跡小車能夠較快速、平穩地完成對各種曲率引導線的尋線行駛任務.
單片機;PWM控制;尋跡;光電傳感器
Abstract:The tracing car was designed,which identify the black guide line in central of the white road by photoelectric sensors. M icrocontroller 80C51 was used to control steering motor and driving motor to drive the intelligent car fast and stably along w ith the guide line. The principles,make processes and software design of the tracing car in sub-modules were described. Based on the characteristics of the tracing path an ideal solution about classified steering gear and segmented speed control was proposed. Experiments show that the tracing robot can complete the task went along w ith the guide line more quickly and smoothly.
Keywords:m icrocontroller;PWM control;tracing;photoelectric sensor
隨著人們對安全性的日益重視,汽車的智能化已成為研究的重點之一.智能汽車作為一種智能化的交通工具,體現了車輛工程、人工智能、自動控制、計算機等多個學科領域理論技術的交叉和綜合,是未來汽車發展的趨勢[1].自動尋跡行駛是汽車智能化的一個方面,目前已有很多關于這方面的研究工作:如采用磁傳感器來檢測路徑的無人駕駛研究工作[2–3],但采用磁傳感器需要在路面預埋磁釘,會對路面造成一定的損壞;有采用CCD攝像頭作為路徑傳感器實現無人駕駛的研究工作[4–5],然而CCD 攝像頭一般價格較為昂貴,且需要對數據進行復雜的轉換和處理;也有采用光電傳感器來檢測路徑實現自動尋跡的研究工作[6–8],光電傳感器具有結構簡單、安裝方便、對道路無損壞和價格低廉等特點.但很多關于這方面的研究都只停留在介紹相關原理,并沒有闡述具體的元器件和制作過程.本文詳述了一種基于80C51單片機控制的尋跡小車的尋跡原理、總體設計、軟硬件設計及制作過程.
1 總體設計
采用與路面顏色有較大差別的線條作引導線,尋跡小車能夠自動檢測到引導線,并沿此引導線行駛.本文設計的尋跡小車采用光電傳感器來識別白色路面中央的黑色引導線,通過單片機控制轉向舵機和驅動電機,從而實現尋跡小車快速穩定地尋線行駛.為保證尋跡小車在尋線的過程中具有良好的操縱穩定性,本文對尋跡小車的運動模型進行分析,針對路徑特點對尋跡小車的方向控制和速度控制提出了較為理想的舵機分級轉向、速度分段控制的解決方案.
尋跡小車分為6個模塊,系統組成如圖1所示.

圖1 尋跡小車系統框圖Fig.1 Block diagram of the tracing car
其工作過程是:安裝在小車前部的光電傳感器檢測路面上黑色引導線的位置,并將測得的信息輸入到CPU控制模塊進行分析處理;CPU控制模塊根據處理結果輸出控制指令,分別對轉向舵機和驅動電機進行PWM控制,通過兩者的相互配合實現尋跡小車左轉、右轉、前行、加減速等,從而實現尋跡小車快速平穩的尋線行駛.
2 硬件設計和制作
2.1 硬件設計
2.1.1 CPU控制模塊
尋跡小車的CPU控制模塊應滿足以下要求:采集7路光電傳感器的檢測信號,根據采樣信號輸出相應的舵機、電機控制信號,實現尋跡小車沿軌跡行駛.綜合考慮性能要求和經濟性等因素,CPU采用80C51單片機.
單片機資源分配如下:P0.0—P0.6用于控制1號傳感器—7號傳感器的信號指示燈;P1.0—P1.7為1號傳感器—7號傳感器的信號輸入接口;P2.1—P2.2為驅動電機PWM控制信號接口;P2.3為轉向舵機PWM控制信號接口.
2.1.2 檢測模塊
檢測模塊由反射式光電傳感器、電位器和運算放大器LM 393組成,如圖2所示.反射式光電傳感器利用黑色引導線與白色路面對發射端發出光線的反射度不同,使接收端分得的電壓不同.運算放大器LM 393的輸出端電壓信號直接輸入控制單片機的傳感器信號輸入接口.

圖2 傳感器連接電路Fig.2 Sensor circuit
2.1.3 驅動模塊
驅動模塊包括驅動電路和驅動電機.如圖3所示,驅動電路采用H型雙極性可逆PWM控制電路,可以實現尋跡小車的前進、后退、加減速等功能.由于單片機輸出的PWM控制信號功率太小,不能直接驅動MOS管工作,因此,在H橋驅動電路兩邊各加入一個三極管8050NPN作為功率放大管(圖3中虛線框所示).單片機通過P2.1和P2.2輸出的PWM控制信號經過三極管放大之后,便可驅動MOS管工作,控制電機的正反轉.

圖3 H型雙極性可逆PWM控制電路Fig.3 H-reversible PWM control circuit in bipolar
因為直流電動機具有優良的速度控制性能,輸出轉矩較大,可直接拖動負載運行,驅動電機采用直流電動機.選用RS-380SH型直流電動機(額定電壓7.2,V,最大功率可達26.5,W).
2.1.4 轉向舵機模塊
舵機是一種位置伺服的驅動器,適用于需要角度不斷變化并要求可以保持的控制系統[9].基于單片機的舵機控制方法具有簡單、精度高、成本低、體積小的特點[10].本文所設計的尋跡小車采用Futaba S3010型舵機,具有高穩定、高轉速、反應靈敏、轉動角度大等特點.舵機采用PWM信號進行控制,直接用P2.3接舵機信號線,產生一個以10,ms為周期的PWM控制信號,通過調整PWM控制信號的占空比來改變舵機的轉向.
2.1.5 電源管理模塊
電源管理模塊包括電池和穩壓電路.電池采用輸出為7.2,V的鎳鎘電池組,為了防止電機、舵機等大功率器件在起動時對其他器件帶來干擾[11],尋跡小車各主要模塊均采用單獨供電的方式,其電源管理分配圖見圖4.

圖4 電源管理分配圖Fig.4 M anagement of power distribution
電池組直接給驅動電機供電,采用三片穩壓芯片LM 2940分別給檢測系統模塊、轉向舵機模塊、單片機供電.
2.2 尋跡小車制作
車體采用東莞市博思電子數碼科技有限公司G768型車模.
2.2.1 驅動電機的安裝
驅動電機安裝在小車后部,與后輪軸用齒輪傳動,電機軸與后輪軸之間的傳動比為9∶38(電機軸齒輪齒數為18,后輪軸齒輪齒數為76).
齒輪傳動機構對尋跡小車的驅動能力有較大的影響,調整的原則是:兩傳動輪軸要保持平行,齒輪間的配合間隙要合適,不能有卡住或遲滯現象;調整好的齒輪傳動噪音小,并且不會有碰撞類的雜音.
2.2.2 舵機的安裝
舵機是具有較大延遲特性的對象,其延遲與其轉角大小成正比,如果能使舵機轉過的角度越小,車輪轉過的角度越大,則會大大提高舵機的響應速度,而這不僅與舵機的安裝方式有關,也與舵機輸出臂的長度有關系,輸出臂越長越有利于提高響應速度,但過長的輸出臂容易使舵機達到其堵轉力矩[9].對各種安裝方式進行比較,找到了一種較好的安裝方式,在此安裝方式下的最優輸出臂長7,cm,可使整個小車在尋跡轉向中更加精確快速.
2.2.3 傳感器的布置
反射式光電傳感器在小車前部“一”字形排布,考慮到弧度信息采集的連貫性,采用非均勻布局,非均勻布局的理論依據是等角度分布原則,即先確定“一”合適的定點,從定點依次等角度畫射線,射線與傳感器水平線相交的位置即為傳感器的位置[12].如圖5所示,傳感器4為兩前輪軸的中心,中間黑線即為路徑中央黑色引導線,黑色引導線的寬度為25,mm,為保證尋跡小車總能檢測到黑色引導線,傳感器間的最大間隔應比該寬度要小;另外,因為尋跡小車系統中舵機從接受信號到控制輸出約有110,ms的延遲,將電路板伸出一定的長度(約7,cm)固定在小車的前方,可以提前檢測到引導線信息,從而對延遲進行補償,這有利于減少小車運動過程中的振蕩,使小車平穩地跑過彎道[11].

圖5 傳感器布局圖Fig.5 Diagram of sensor layout
此外,安裝時各部分電路板大小應與車體相適應并布置在恰當的位置,以便使小車的重心位于有利于小車平穩行駛的位置.
3 系統軟件設計
3.1 整體控制方案
圖6為尋跡小車的系統控制框圖.引導線是小車跟蹤的目標,小車通過檢測系統檢測出小車相對于所要跟蹤路徑的相對位置,再將此信息輸入到單片機,單片機將此信息進行處理后將控制命令輸出到舵機和驅動電機,以控制小車的位置和速度,保證小車快速平穩地沿預先設定好的路線行駛.

圖6 系統控制框圖Fig.6 Block diagram of the control system
3.2 轉向舵機的分級控制
由于跑道各點的轉彎半徑具有不確定性,因此,需要設計分級轉向程序,使小車在不同轉彎半徑處實現不同角度的精確轉向.圖7為轉向舵機的控制流程圖.
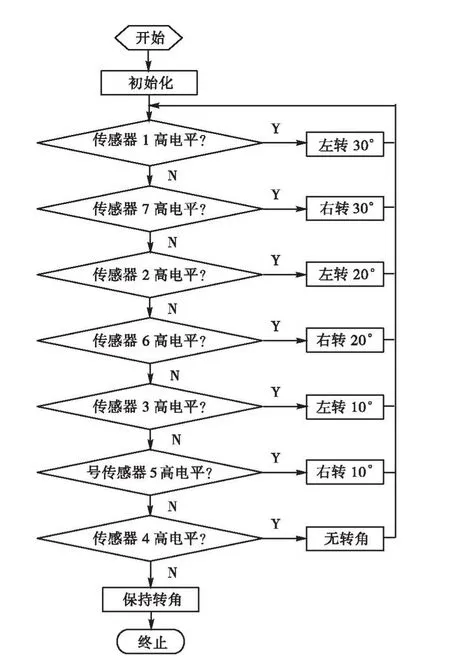
圖7 轉向舵機控制流程圖Fig.7 Flow chart of steering gear’s control
跑道的彎度信息由小車前方的傳感器反映,單片機上電初始化之后,開始對各個傳感器按順序進行掃描,根據傳感器信號確定轉角.若所有光電傳感器都為低電平,則說明沒有傳感器檢測到黑線,表示尋跡小車脫離軌跡.此時不改變舵機轉向,同時單片機輸出控制信號,使直流驅動電機停止轉動.
可以看出,反射式光電傳感器越多,則分級轉向越精確,尋跡小車行駛越流暢;但同時要注意電路線束布置和傳感器之間干擾.
3.3 驅動電機的分段控制
采用分段速度控制的方法,將跑道彎度分成4段,通過傳感器檢測跑道彎度信息,將檢測到的信息送入單片機處理,單片機根據速度控制算法得到相應的PWM控制信號,對驅動電機的轉速進行控制,從而控制尋跡小車的速度.驅動電機的PWM周期為1,ms.
圖8為驅動電機轉速控制流程圖.為了防止小車在起步時加速過慢,在起步時加全電壓,一段距離之后才對其進行速度調整.在小車行駛過程中,單片機按流程圖順序對各傳感器進行連續掃描,當1號或7號傳感器為高電平時,表明小車處于大彎道處,根據控制算法調整PWM控制信號占空比為85%,使小車減速,以免其沖出跑道;同理,當2或6、3或5號傳感器為高電平時,分別調整PWM控制信號占空比為90%、95%;當4號傳感器為高電平時,單片機應輸出占空比為100%的PWM控制信號,使小車全速前進.當小車沖出跑道時,所有傳感器都為低電平,單片機輸出占空比為5%的PWM控制信號,并控制驅動電機瞬時反轉,從而使小車快速減速,然后迅速停下.由此可見,雙極性驅動模式,大大縮短了智能車減速的時間.

圖8 驅動電機轉速控制流程圖Fig.8 Flow chart of drive m otor’s speed control
3.4 實驗
實驗表明,在不同曲率的路段上(曲率半徑分別為0.5、1、2 m),經過多次對驅動電機速度和舵機轉向的參數進行調整后,小車能在直道以2,m/s,在彎道以0.8,m/s的平均速度,平穩地在圖9所示測試路徑上行駛.

圖9 尋跡小車測試路徑圖Fig.9 Test path of tracing car
4 結 語
本文設計了一種尋跡小車系統,并詳細闡述了尋跡原理、軟硬件設計及制作過程.尋跡小車系統的硬件設計和軟件設計均采用模塊化設計原則,使得設計易讀懂、易修改、易擴充.
另外,傳感器的靈敏度可根據光電傳感器和引導線間的距離來調節,但是易受環境光影響且前瞻距離不長,影響小車在彎道的速度.在調試過程中,需要根據路徑曲率的不同,通過軟件調整驅動電機速度和舵機轉向角度,以確定最佳值.該尋跡小車系統的設計方案可供尋跡類小車整體設計時參考.
[1] 王偉,陳慧,刁增祥,等. 基于光電導航無人駕駛電動汽車自動尋跡控制系統研究[J]. 汽車工程,2008,30(2):137–140.
[2] 王春燕,吳超仲,丁振松,等. 基于磁道釘導航的智能公路車道保持硬件控制系統研究[J]. 公路交通科技,2003,20(1):129–131,135.
[3] 楊利兵,嚴新平,吳超仲,等. 磁道釘導航控制系統研究[J]. 武漢理工大學學報,2002,26(4):454–456.
[4] 孫涵,任明武,唐振民. 基于機器視覺的智能車輛導航綜述[J]. 公路交通科技,2005,22(5):132–135.
[5] 皮燕妮,史忠科,黃金. 智能車中基于單目視覺的前車檢測和跟蹤[J]. 計算機應用,2005,25(1):220–223.
[6] 郭忠山,魏澤鼎,楊雪,等. 基于AT89C52控制的尋跡小車設計[J]. 機電工程技術,2008,37(03):61–63.
[7] 高月華. 基于紅外光電傳感器的智能車自動尋跡系統設計[J]. 半導體光電,2009,30(1):134–138.
[8] 宋雪麗,王虎林,王毅. 基于單片機的尋跡機器人的系統設計[J]. 儀表技術,2009(4):36–38.
[9] 嚴金輝,裘有斌,張星. 汽車轉向和舵機安裝方式的數學模型[J]. 機電設備,2008(6):5–8.
[10] 楊明,程磊,黃衛華,等. 基于光電管尋跡的智能車舵機控制[J]. 光電技術應用,2007,22(1):50–53.
[11] 陳東,尚巍. 基于光電管的智能車模自動循線控制系統[J]. 機械與電子,2007(10):32–36.
[12] 蔡公華,洪乃剛. 一種智能車控制算法的研究[J]. 電子科技,2009,22(6):10–13.
A Design of Tracing Car Based on Control of 80C51 M icrocontroller
PENG Yi-zhun1,JIANG Xiao-bao2,ZHUANG M ing-jia3,BAO He-ping1
(1. College of Electronic Information and Automation,Tianjin University of Science&Technology,Tianjin 300222,China;2. School of Elecrical Engineering &Automation,Tianjin University,Tianjin 300072,China;3. BYD Auto Co.Ltd.,Shenzhen 518118,China)
TP242.6
A
1672-6510(2011)01-0055-05
2010–07–12;
2010–10–22
天津科技大學引進人才科研啟動基金資助項目(20070433)
彭一準(1974—),男,湖南人,講師,yzpeng@126.com.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產業(2016年3期)2016-05-17 04:32:12