外磁場驅動無線膠囊式內窺鏡的動力學模型
2011-09-29 08:22:24葉福麗史貴連
醫療衛生裝備 2011年2期
葉福麗,史貴連
外磁場驅動無線膠囊式內窺鏡的動力學模型
葉福麗,史貴連
目的:建立外磁場驅動無線膠囊式內窺鏡驅動力的動力學模型,并對模型進行仿真與實驗。方法:磁場隨線圈組中電流大小以及方向的改變而改變,利用磁場的改變控制無線膠囊式內窺鏡的運動。結果:開發了OV7930外圍電路PCB,并按設計組裝成磁控無線膠囊式內窺鏡膠囊。結論:實驗中采集到清晰的圖像,證明了該模型設計的可行性
內窺鏡;驅動力;線圈;電流
AbstractObjectiveTo set up the dynamics model of wireless capsule endoscopy driven by external magneticfield and perform some experiments and emulations.MethodsThe magneticfield changed with the amount and direction of circuit in the coils.The change of magneticfield led to the moving of wireless capsule endoscopy.ResultsThe peripheral circuit of OV7930 was developed,and a magnetic controlled wireless capsule endoscopy MEMS system was assembled according to the design.ConclusionThe clear image is captured in experiments,which proves the feasibility of model design.[Chinese Medical Equipment Journal,2011,32(2):21-23]
Key wordsendoscopy;driving force;coil;electric current
1 引言
無線內窺鏡的優點是顯而易見的。它可以攜帶,操作簡單,檢查期間不影響患者行走和日常生活,且無任何不適,無操作導致的并發癥,不需要住院,可以實現全消化道的檢查。對于小腸的檢查優于任何傳統的檢查方式,包括CT、X射線和傳統內窺鏡,圖像資料也可以反復分析[1-2]。但是,由于目前的技術水平限制,它也存在很多的不足,最大的問題是動力系統的問題——運動機械而且單一。這也正是我們需要解決的問題。
當前,主流無線內窺鏡的驅動系統純粹依靠腸道的蠕動來帶動無線內窺鏡在體內的運動,這種方式是最為常見的驅動形式。這種系統不需要考慮驅動問題,可以把膠囊做得很小,不足的是這種方式較難對準病灶,有時會導致檢查失敗。另外一種就是膠囊內部有驅動裝置可以帶動膠囊在體內做前后的螺旋推動運動,常見的就是帶螺旋槽圓柱旋轉推進器的無線內窺鏡[3-4],缺點是運動機械而且單一。
如果用外磁場驅動無線膠囊式內窺鏡,就可以使患者吞服的無線腸胃內窺鏡在醫生的控制下做多自由度的移動,使內窺鏡的攝像頭直接在可疑區域做有針對性的檢查。這樣大大增加了檢查的成功率,同時也減少了醫生的檢查時間,很大程度上提高了醫生的工作效率。
2 力學假設
我們假設如下力學模型[5]:
(1)帶有磁性材料的膠囊在力學上定義為通以一定電流的螺線管。
(2)帶有磁性材料的膠囊的磁場分布與螺線管的磁場分布完全相同,并且人體以及其他的裝置對于外磁場的分布沒有影響。
根據以上的力學假設,我們可以建立一個模型,這個模型可以模擬帶有磁性材料的膠囊在人體內受到外磁場力以及受磁場力影響進而發生動作的真實情況。在這個力學假設之中,有以下幾點需要特別注意:螺線管的受力符合力的合成原則,不需要考慮螺線管的支撐、穩定以及固定的問題。
3 模型建立
如圖1所示,建立相關模型[6]。黑色的圓為線圈,線圈采用多匝純銅線圈。形狀為正圓形,有利于產生均勻的磁場,并且磁場分布也較為規律,有利于以后的控制。立方體內充滿液體,這樣設計是因為人體內也是充滿體液的。盡可能地模擬人體內的情況,以達到要求。并且,模型中的液體對于磁場的分布是沒有重大影響的。人體處在磁場中時,可能會受到磁場的影響而對處在其中的膠囊內窺鏡有所影響,根據已有的資料,這點影響可以不加以考慮。
模型的詳細情況如圖1所示。
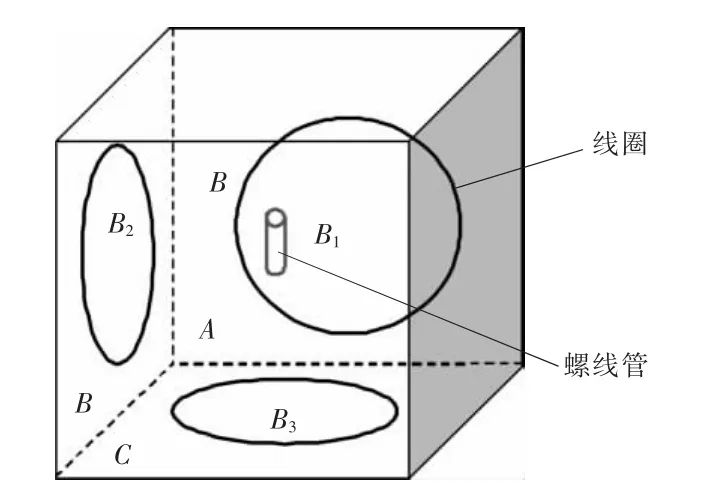
圖1 力學模型
(1)立方體為一個容器,容器中的柱體為螺線管,對螺線管通一定大小、方向的電流,產生磁場B。
作者單位:437100 湖北咸寧 咸寧學院生物醫學工程學院(葉福麗、史貴連)
(2)螺線管浸泡在一定黏度系數的液體中,這種液體可以模擬人體器官以及體液等對膠囊運動的阻力作用,同樣的,這種黏滯力也可以看作是維持膠囊平衡的力。
(3)在立方體容器的3個面上貼有3個大線圈,這3組線圈可以提供外磁場,分別位于立方體的A、B、C等3個面,如圖1中的圓所示,產生的磁場分別為B1、B2、B3。
秦鐵崖來京城之前,翻閱舊案卷宗,去了趟證物庫房,翻出這個煙花筒帶在身邊。秦鐵崖道:“你不叫喬十二郎,你是陸楓橋。”
(4)B1、B2、B3等 3 個磁場可以分別啟動,也可以疊加使用,并且B1、B2、B3的磁場在立方體的空間內可以看作是均勻磁場[7]。
(5)B1、B2、B3對螺線管的作用力符合力的合成作用,也就是說螺線管受到B1、B2同時使用時的作用力F合與單獨使用B1與B2時的作用力F1與F2的疊加F的效果是完全相同的。
4 模型仿真與實驗
在實驗室環境中,可以近似地模擬出以上的力學模型,做法如下:使用玻璃缸盛放一定量的黏度系數穩定的液體,這種液體對于螺線管的阻力可以近似地模擬出帶磁性材料的膠囊在人體內受到的阻力,使用3組大的線圈分別如圖1中的位置放置,通以一定的電流就可以產生類似于B1、B2、B3的均勻磁場。對于浸泡在液體中的螺線管,可以利用細線加以適量的束縛,這對模擬實際情況下的膠囊狀態影響不大,因為在人體內,膠囊也是不可能懸浮的,總是會有一個支撐點來支撐膠囊。
線圈A、線圈B、線圈C和螺線管的電流方向如圖2所示,產生的磁場方向如圖2中所示,線圈A中通以圖中電流方向時,產生的磁場方向為X軸負向,令線圈A中的電流方向為正向。線圈B中通以圖中電流方向時,產生的磁場方向為Y軸負向,令此時線圈B中的電流方向為正向。線圈C中通以圖中電流方向時,產生的磁場方向為Z軸負向,令此時線圈C中的電流方向為正向。當螺線管以豎直或者水平與Y軸放置時,電流方向如圖中所示,產生的磁場方向為Z軸正向。
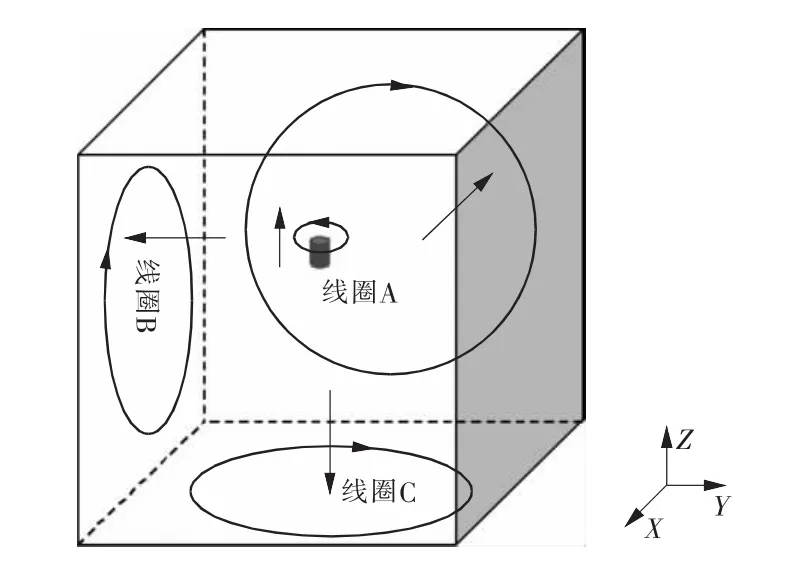
圖2 線圈內的模型
5 可行性分析
根據圖2中的電流方向進行分析,可以得出以下幾點結論:
(1)當線圈A通以正向電流,線圈B和線圈C不通電,螺線管垂直放置,此時,線圈A對螺線管的作用力為X軸負向。
(2)當線圈B通以正向電流,線圈A和線圈C不通電,螺線管垂直放置,此時,線圈B對螺線管的作用力為Y軸負向。
(3)當線圈A、線圈C通以正向電流,線圈 B不通電,螺線管不是處于豎直狀態,此時,線圈A和線圈C對螺線管的作用力為X軸負向。
(4)當線圈B、線圈C通以正向電流,線圈 A不通電,螺線管不是處于豎直狀態,此時,線圈B和線圈C對螺線管的作用力為Y軸負向。
(5)當線圈C通以正向電流時,線圈A和線圈B不通電,螺線管處于豎直狀態,線圈C對螺線管的作用力為Z軸正向。
(6)當線圈A、線圈B通以正向電流時,線圈C不通電,螺線管處于水平面時,線圈A和線圈B對螺線管的作用力為向Y軸負向的轉動力。
以上6種情況是線圈A、線圈B、線圈C、螺線管在假定的正向電流的情況下得出的。根據磁場力的基本原理,很容易就得到線圈A、線圈B、線圈C、螺線管在其他的電流方向的情況下螺線管的受力情況。部分情況如表1所示。
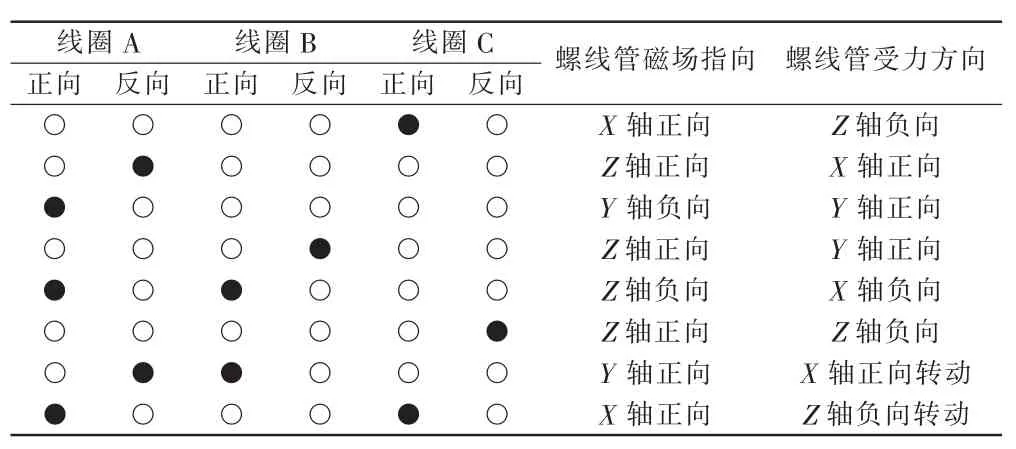
表1 螺線管受力方向與螺線管磁場指向和線圈陣列電流方向的關系
線圈A、線圈B、線圈C可以獨立啟動操作,因此總共有27種組合方式,這對于處于任何狀態的螺線管都可以進行操作。表1列舉了其中的8種情況,對于螺線管的其他的電流方向和位置,通過3個線圈的不同電流方向和通斷的搭配可以產生出相對應的磁場來改變螺線管周圍的磁場,進而使其向著我們所需要的方向運動。
6 實驗驗證及結果分析
基于目前國際最新的微型CMOS圖像傳感器OV7930,對人體無線膠囊內窺鏡膠囊進行了設計和實驗研究開發了OV7930外圍電路PCB,并按設計組裝成磁控無線膠囊式內窺鏡膠囊。無線內窺鏡主要由微處理模塊、照明模塊、圖像采集模塊和圖像傳輸模塊構成,體外主要有圖像接收和處理模塊以及控制系統組成。其中,微處理模塊主要負責協調“膠囊”各部分的工作、接受指令、控制照明等工作。圖像采集模塊負責采集圖像數據并傳送至傳輸模塊,圖像傳輸模塊則負責將收集到的圖像通過無線的方式傳輸至體外的接收機上。各個部分都在微處理模塊的控制下協同工作,完成體內圖像的采集工作。
為了減小“膠囊”的整體體積,采用尺寸比較小的環形天線[8-9],分別使用不同的頻率發送和接收信號,一個用于圖像信號的傳輸,一個用于控制信號的接收,如圖3所示。
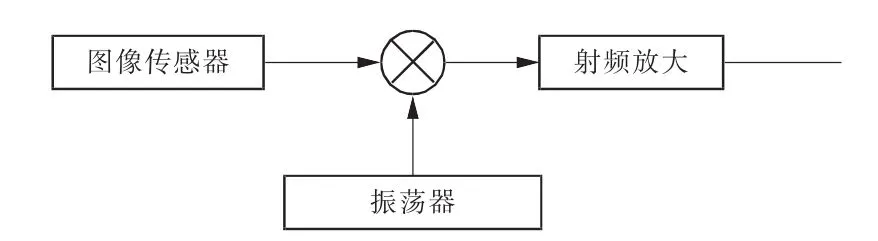
圖3 圖像信號發射電路
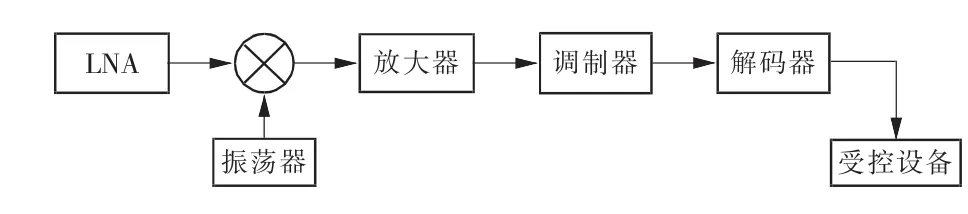
圖4 控制信號接收電路
圖像傳感器完成圖像采集之后,將圖像傳輸到圖像傳輸模塊并轉化為電信號,經過發送電路處理、調制然后經由發射天線發送[10-11]。
如圖4所示,控制天線接收到外部發送的控制信號之后,經過放大、調制、解碼之后就會對受控設備進行控制,例如控制照明模塊的開關、膠囊的動作等。成像試驗驗證該系統能采集到清晰的圖樣,證明了該系統設計的可行性。
7 實驗改進
在實際應用中,除了3組線圈之外,還可以增加幾組線圈,這樣或許更容易實現,改進圖如圖5所示。模型仍然采用正方體來表示,其中一共采用14個線圈組。具體分布情況如下:
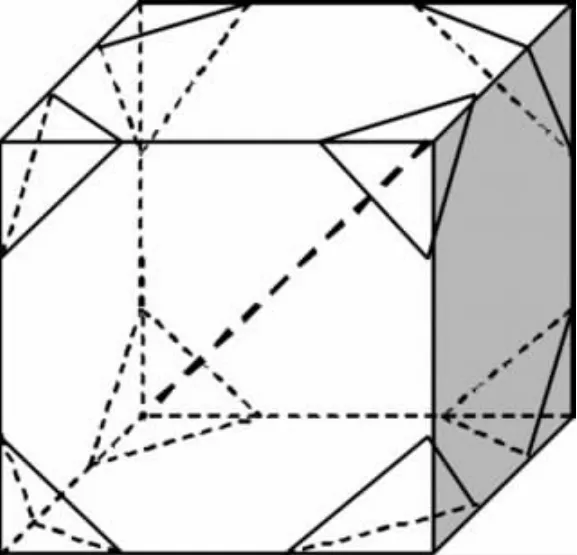
圖5 改進型的線圈陣列
(1)正方體的6個面每個面都有一個線圈,并且相互對應的面上的2個線圈為一組,由一個控制開關控制,共計3組線圈。
(2)正方體的8個對頂角上,每2個相對的對頂角都有線圈,總共為8個線圈。每2個相對的對頂角上的2個線圈也是一組,并且由一個控制開關控制,共計4組線圈。
[1]徐澤亮,馬培蓀.基于電磁能量理論的爬壁機器人履帶用磁吸盤設計研究[J].機械設計,2002,11(11):26-30.
[2]何斌,楊燦軍,周銀生.粘彈性腸道能動性模型的建立與數值模擬[J].中國生物醫學工程學報,2003,22(3):267-273.
[3]付國強,梅濤,孔德義,等.無線微型機器人腸道內窺鏡系統中圖像采集與無線傳輸子系統的設計[J].光學精密工程,2002,10(6):65-67.
[4]高立明,林良明,顏國正,等.全方向蠕動機器人驅動內窺鏡系統的研究[J].中國生物醫學工程學報,1998,17(1):36-41.
[5]張永順,賈振元,丁凡,等.外磁場驅動無纜微型機器人行走特性的分析[J].機械工程學報,2003,6(39):15-18.
[6]TANG Can,WANG Tianmiao,CHOU Wusheng,et al.Design and realization of robot control system for neurosurgery[J].Robot,2004,26(6):53-57.
[7]WANG Shuxin,DING Jienan,YUN Jintian,et al.A robotic system for microsurgery:the “MicroHand”system[J].Robot,2006,28(2):130-135.
[8]車文華,夏平疇,張一鳴.磁體外部片狀均勻磁場區的構建[J].中國電機工程學報,2003,23(4):71-76.
[9]Blair S Lewis.The utility of capsule endoscopy in obscure gastrointestinal bleeding[J].Techniques in Gastrointestinal Endoscopy,2003,5(3):115-120.
[10]Mir K,Norihiko K,Yoshihiko N.Design and Control of a Microrobotic System Using Magnetic Levitation[J].IEEE /ASME Transactions on Mechatronics,2002,7(1):12-14.
[11]鄭小林.無線膠囊式小腸內窺鏡技術進展[J].中國醫療器械信息,2004,10(4):6-8.
( 收稿:2010-08-04 修回:2010-10-21)
Dynamics Model of Wireless Endoscopy Driven by External Magneticfield
YE Fu-li,SHI Gui-lian
(Biomedical Engineering College of Xianning Institute,Xianning,Hubei Province 437100,China)
TH773
A
1003-8868(2011)02-0021-03
葉福麗(1977-),女,湖北京山人,碩士,講師,主要從事生物醫學工程方面的教學與研究工作;史貴連(1978-),男,湖北漢川人,碩士,講師,主要從事生物醫學工程方面的研究工作。
史貴連,E-mail:swillen@sohu.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
當代陜西(2022年6期)2022-04-19 12:11:54
計算機應用(2022年2期)2022-03-01 12:33:42
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
光學精密工程(2016年6期)2016-11-07 09:07:19
